# 新手入门
半物理仿真管理工具(Sysplorer Real Time,下文简称 RT )是面向半物理仿真工程的专用上位机软件。它以真实物理模型为基础,减少虚拟系统与真实设备之间的误差,在系统开发初期到验证阶段,引入实时软硬件环境进行仿真。本文介绍了使用 RT 工具箱,将 EPB 半物理模型转换为 C 代码编译部署到实时目标机中,进行实时仿真控制及监测的方法。
# 案例分析
EPB(Electronic Parking Brake,电子驻车制动系统)以卡钳式 EPB 最具代表性,被广泛用于乘用车中。它利用线控技术将行车过程中的临时性制动(Auto Hold)功能和停车后的长时性制动(Parking Brake)功能整合在一起,并由电子控制方式实现停车制动。EPB 系统去除了普通机械式驻车制动系统的手柄或踏板等机械装置,通过一个 EPB 控制器开关(即电子驻车按钮,通常设计为按钮 P)对驻车制动器进行控制,该系统实现了驻车制动的电子化控制。

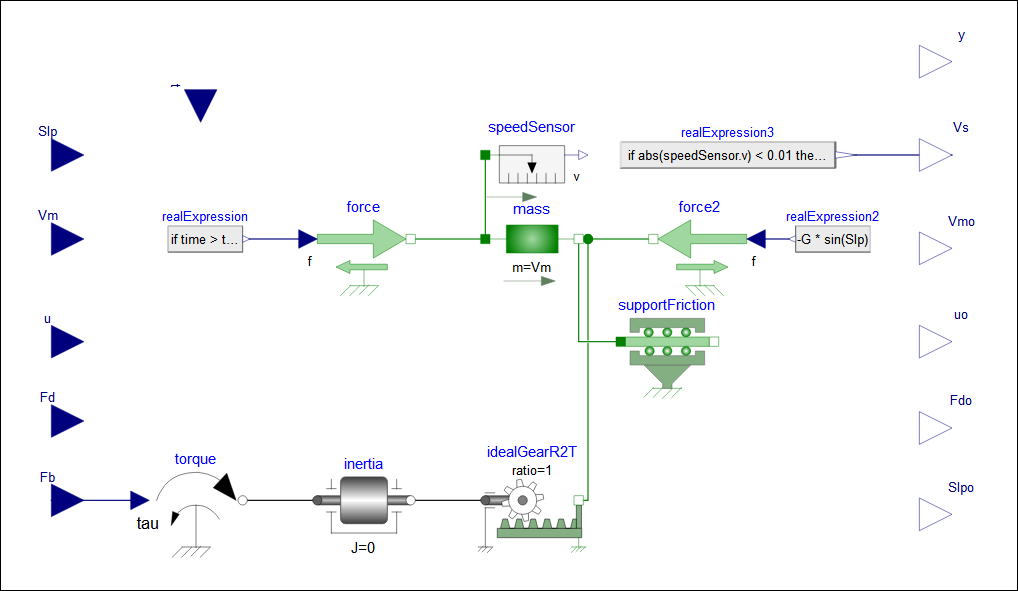
所构建的 EPB 物理模型如下图所示
通过本文,您将学习:
使用 Sysplorer Real Time 工具箱搭建半物理模型实时仿真系统;
画布的使用;
如何配置仿真设置;
比较模型仿真结果和实时仿真结果,以了解数值等效性。
# 环境配置
EPB 半物理实时仿真系统由控制器(制动控制算法)和实时机(车辆模型)组成。控制器的输入为车速、路面坡度、EPB 控制器开关状态、刹车踏板与油门踏板状态等,将汽车质量和路面摩擦系数设计为标定量,输出为制动扭矩。车辆模型中包含汽车质量块、驱动力模块、摩擦力模块、速度传感器、电机、齿轮、转动机械结构及平动机械结构。模型输入为制动扭矩,由电机推动转动机械结构,再通过转动转平动推动齿轮动作,实现车辆制动。模型输出包括速度传感器采集到的车速、汽车质量、斜坡角度(平路上为0°)和路面摩擦系数,输出至控制器中,继而形成实时数据闭环,共同构成半物理仿真系统,以对控制器进行测试。进而可以通过 Sysplorer Real Time 软件进行实时仿真控制及观测。因此使用 Sysplorer Real Time 软件的环境配置如下:
Windows 使用环境:
名称 详细说明 处理器 Intel(R) Core(TM) i7-8550U CPU @ 1.80 GHz 2.00 GHz 内存 8 G 硬盘 240 GB + 500 GB 操作系统 Windows 11 家庭中文版 用途 使用 MWORKS Real Time 工具箱实时仿真 实时机使用环境:
名称 详细说明 处理器 Intel Xeon(R) Silver 4210R CPU @ 2.40 GHz x 40 内存 62.5 GiB 硬盘 3.0 TB 操作系统 Ubuntu 18.0.4 LTS 用途 实时仿真平台 提示
使用本实时机请联系同元公司提供技术支持。
控制器使用环境
名称 详细说明 处理器 STM32F407 最高主频 168 MHz SRAM 192 K 用途 控制器,与实时机形成闭环
# 使用前准备
注意
使用本工具箱需要先获取同元 License。
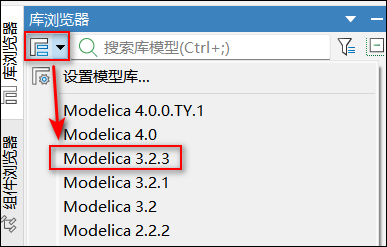
因新手入门中的模型使用 Modelica3.2.3 版本建立,请将 Sysplorer 主界面 Modelica 库版本修改为 3.2.3 ,否则在翻译模型时会翻译失败;
在 Sysplorer 主页面顶部工具页签,单击半物理仿真管理工具,打开 RT 工具箱。
# 新建解决方案
# 新建解决方案创建案例
进入 RT 工具箱,单击新建解决方案按钮进入向导界面。
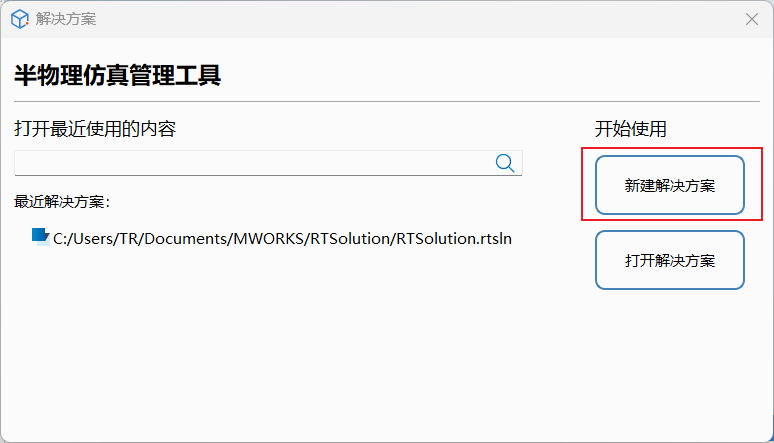
新建 EPB_RT 半物理模型解决方案,填写保存路径、工程名及目标机 IP 地址。
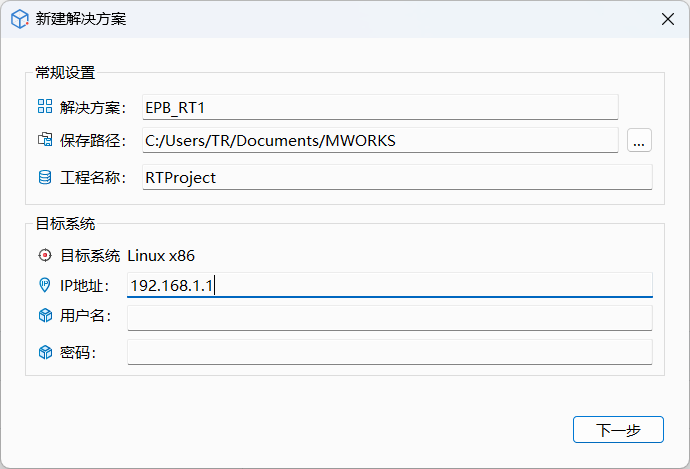
参数名 说明 值 解决方案 填写解决方案名称 EPB_RT 保存路径 填写解决方案保存在电脑磁盘中的位置 E:/RT/RTSend工程名称 填写工程名称 RTProject IP地址 填写需要连接的下位机的 IP 地址 192.168.0.7选择模型文件后,选择模型实例。
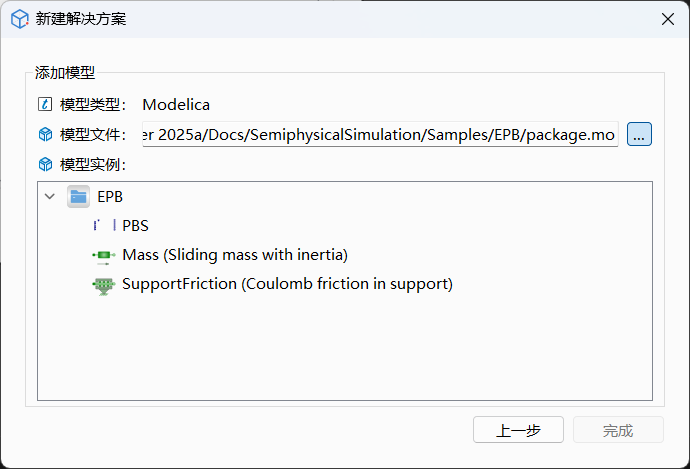
参数名 说明 值 模型文件 选择Sysplorer安装目录下 /Docs/SemiphysicalSimulation/Samples/EPB/package.mo的模型E:/MWORKS/Sysplorer 2024a_2425/Docs/SemiphysicalSimulation/Samples/EPB/package.mo模型实例 选择该模型实例 PBS 解决方案完成新建。
# 打开解决方案打开案例
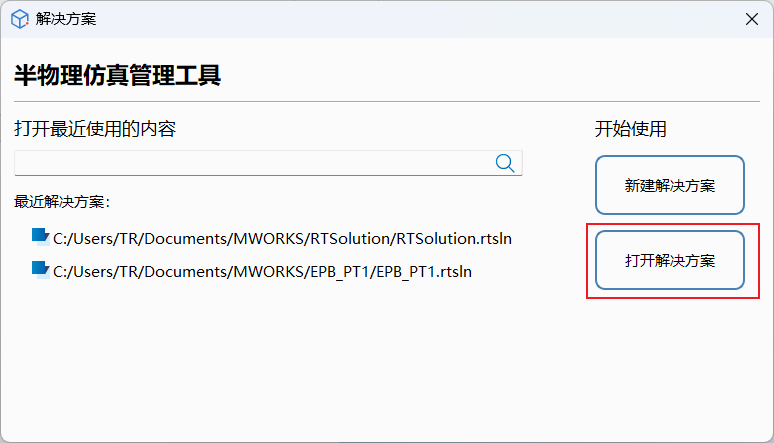
进入 RT 工具箱,单击打开解决方案按钮进入向导界面。
软件安装目录下
\Docs\Resource\ToolBox\RT\EPB_RT,选择.rtsln格式文件,打开解决方案。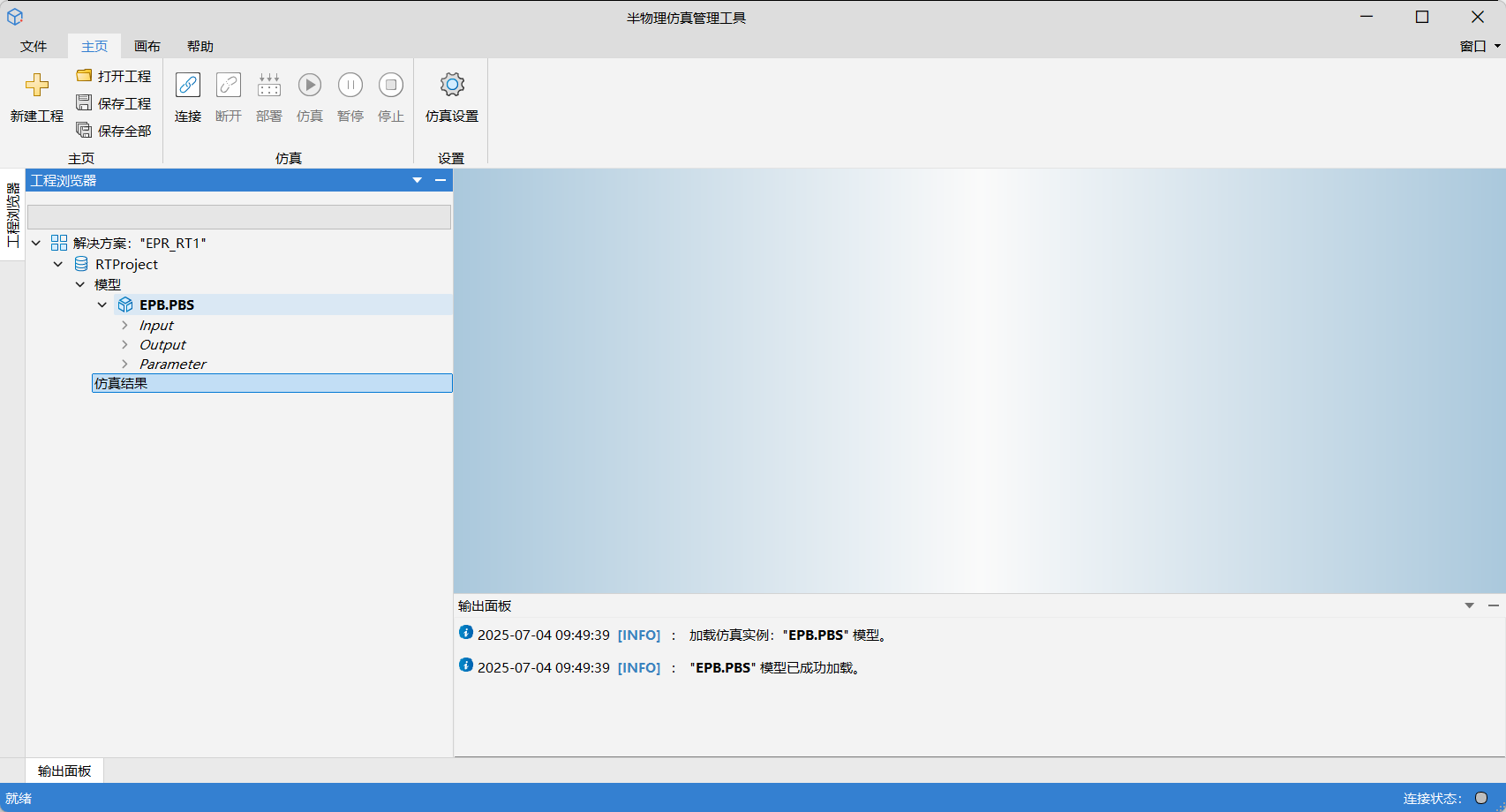
# 新建画布
单击工具栏中的新建画布,选择控件
Gauge,拖入画布,双击该控件,选择 vs 变量进行绑定。选择两个控件chart,拖入画布,双击该控件,分别选择 y 和 vs 变量进行绑定。再拖入六个Spin Box控件,双击名称,按照下图名称进行修改,无需绑定值。具体绑定方式请参见组态界面设计。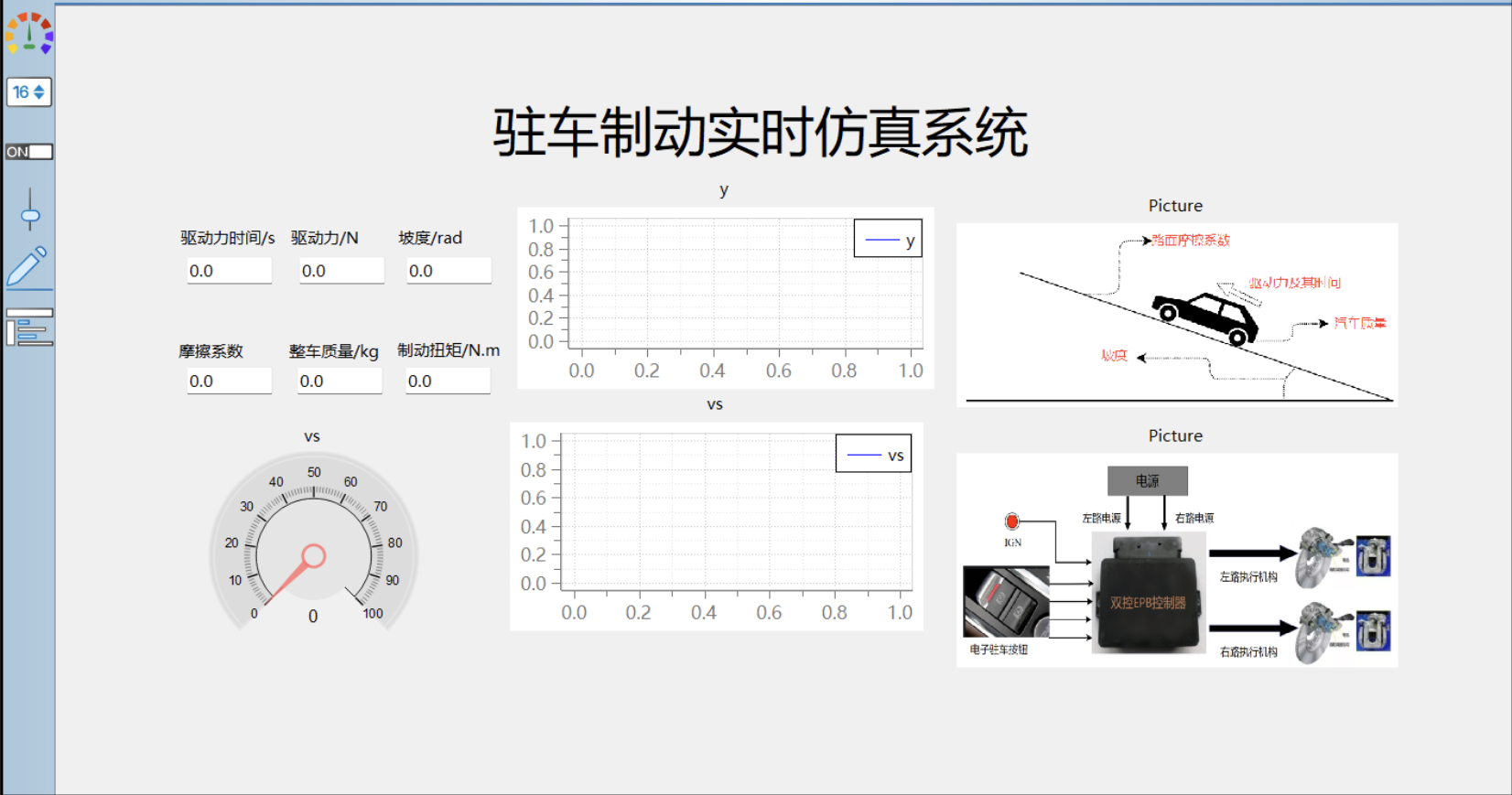
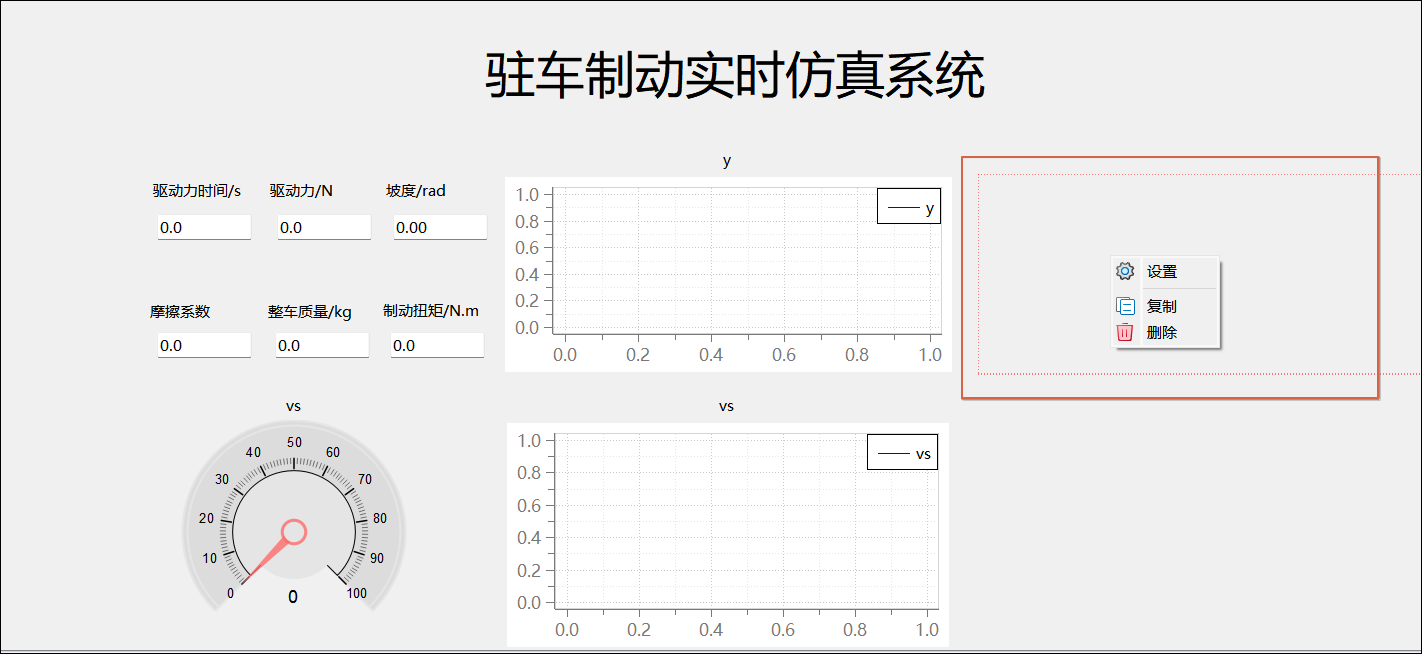
若您是通过解决方案文件直接打开的解决方案,那您需要手动修改图片路径。右击图片区域,选择设置按钮:
将图片路径修改为软件安装目录下
\Docs\Resource\ToolBox\RT相对应的图片。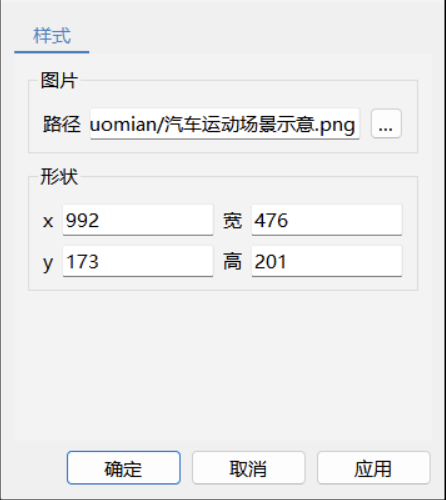
# 仿真设置
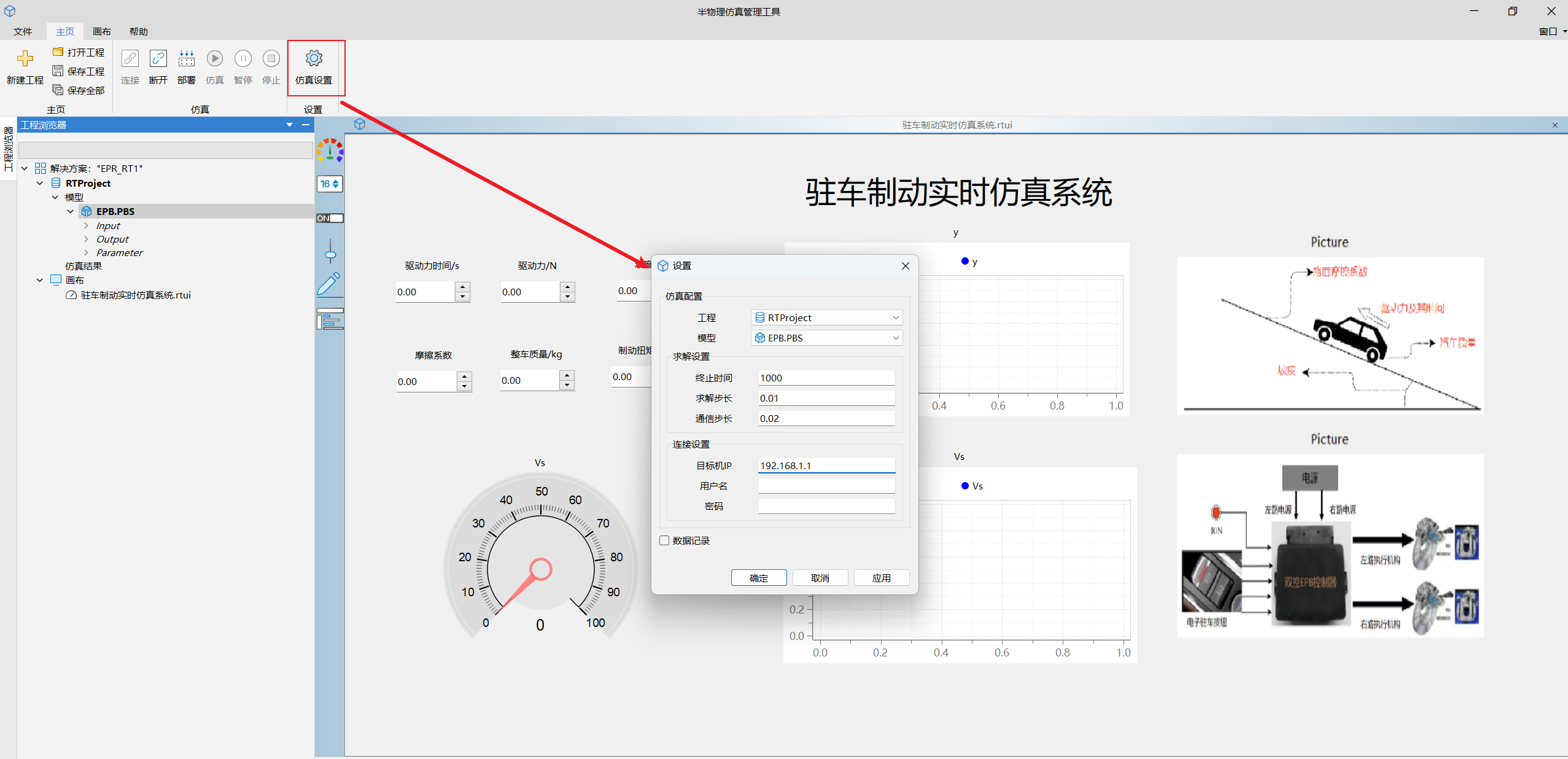
跳转至开始页签,选择设置按钮,弹出设置参数框。
| 参数名 | 说明 | 值 |
|---|---|---|
| 工程 | 通过下拉框选择当前设置项的工程 | RTProject |
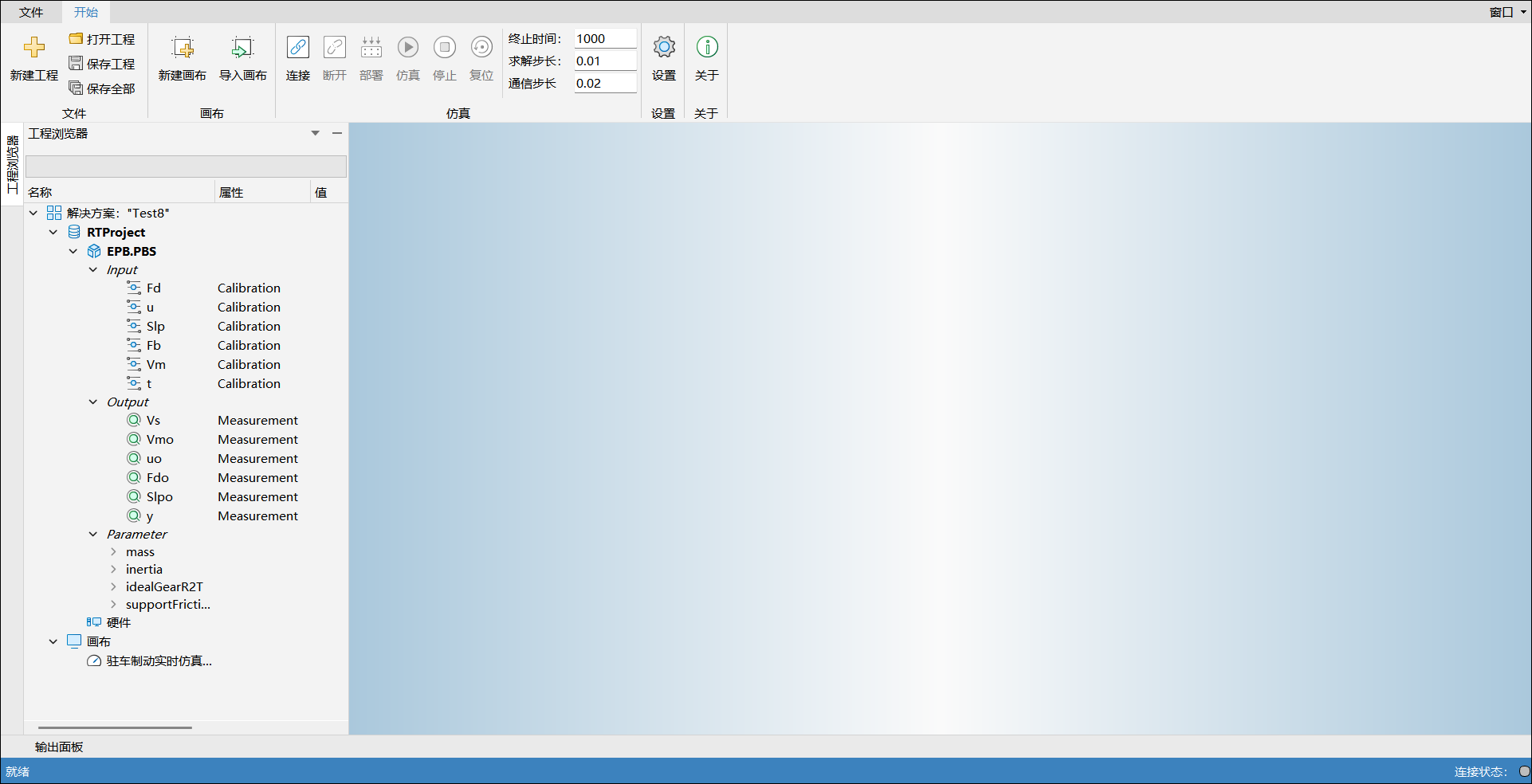
| 模型 | 通过下拉框选择当前设置项的模型 | EPB.PBS |
| 终止时间 | 设置仿真终止时间 | 1000 |
| 求解步长 | 设置仿真求解步长 | 0.01 |
| 通信步长 | 设置仿真通信步长 | 0.02 |
| 目标机 IP | 设置下位机的IP地址 | 192.168.0.7 |
# 模型部署
提示
从本步骤开始,请确保实时机内系统与仿真引擎已正确安装(实时机配置及系统安装包可联系同元公司提供技术支持)。
安装完成且搭建 Sysplorer Real Time 软件的计算机与实时机间的通信正常后,即可单击工具栏中的连接,与实时机建立通信。
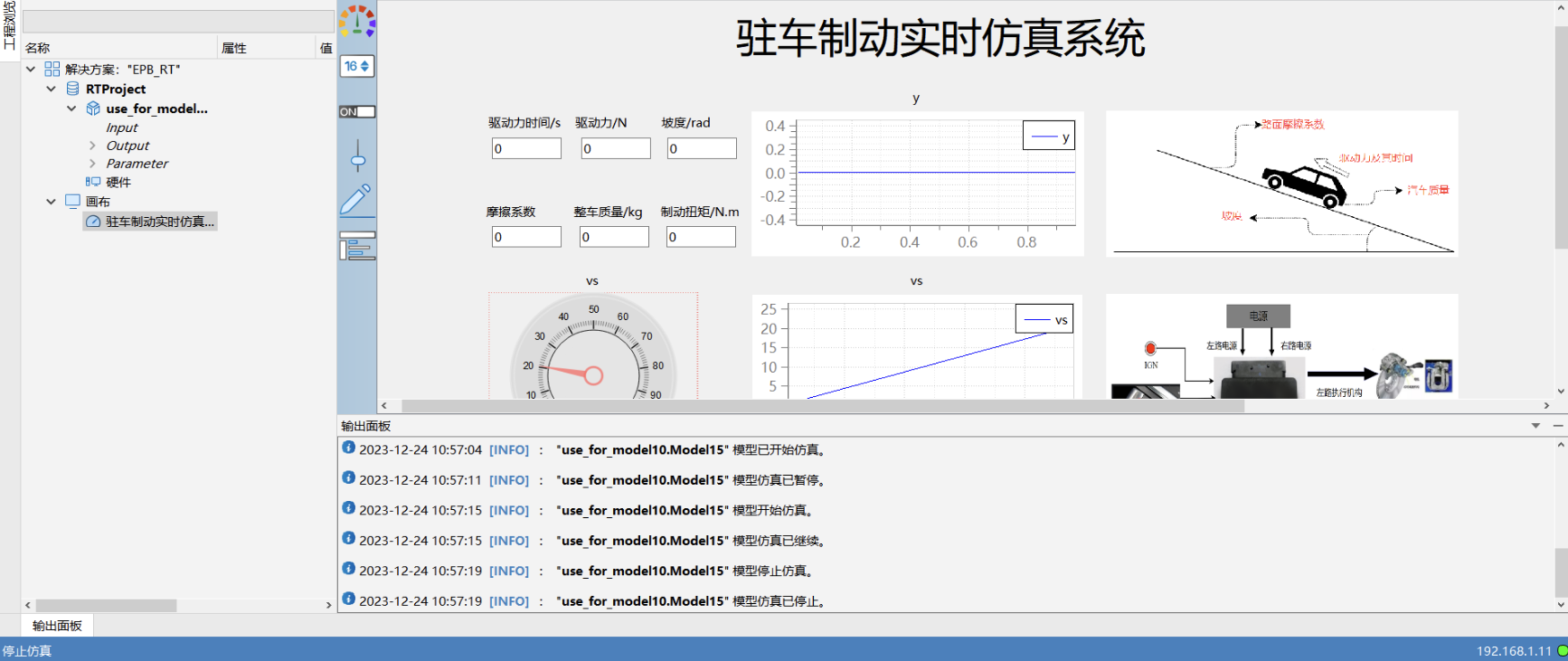
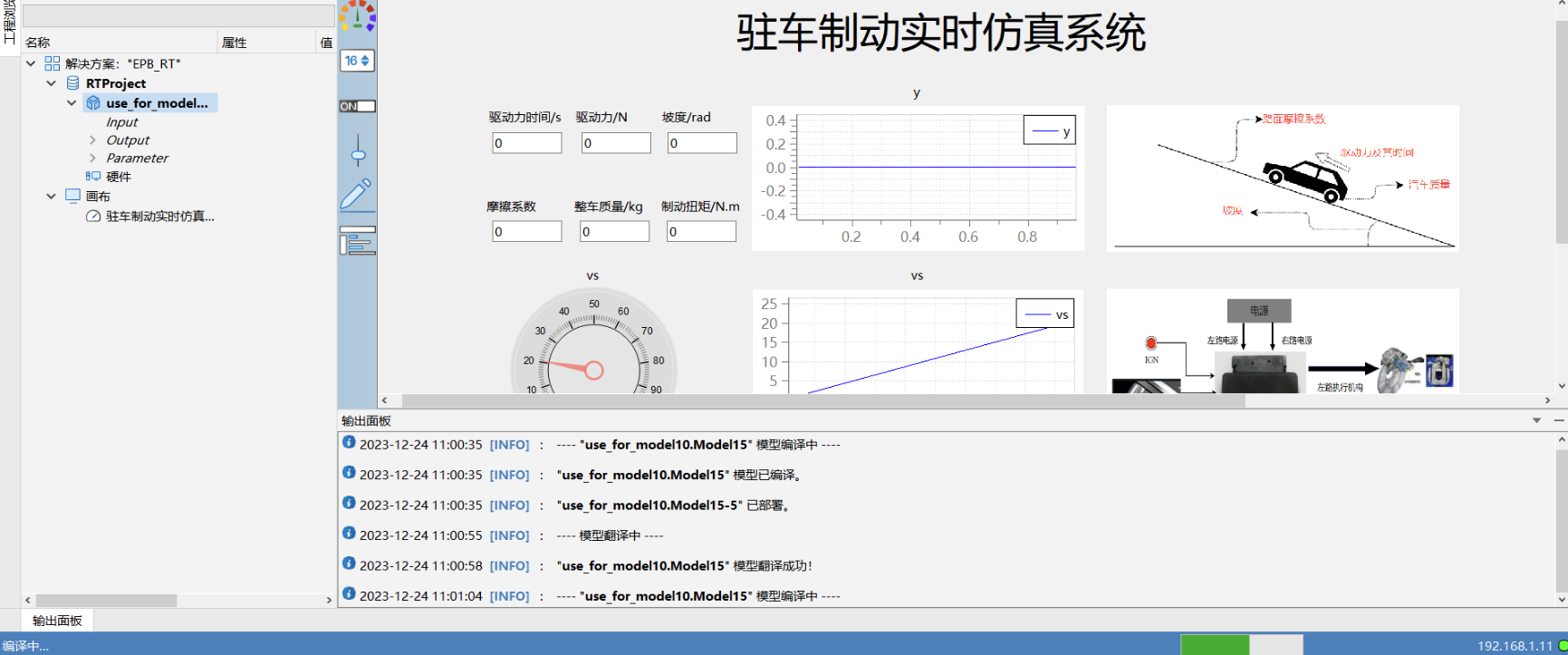
当成功建立通信后,即可继续部署。将 EPB_PBS 半物理模型进行编译,生成可执行程序,并下载至实时机中。可以在输出面板查看各种通知消息。
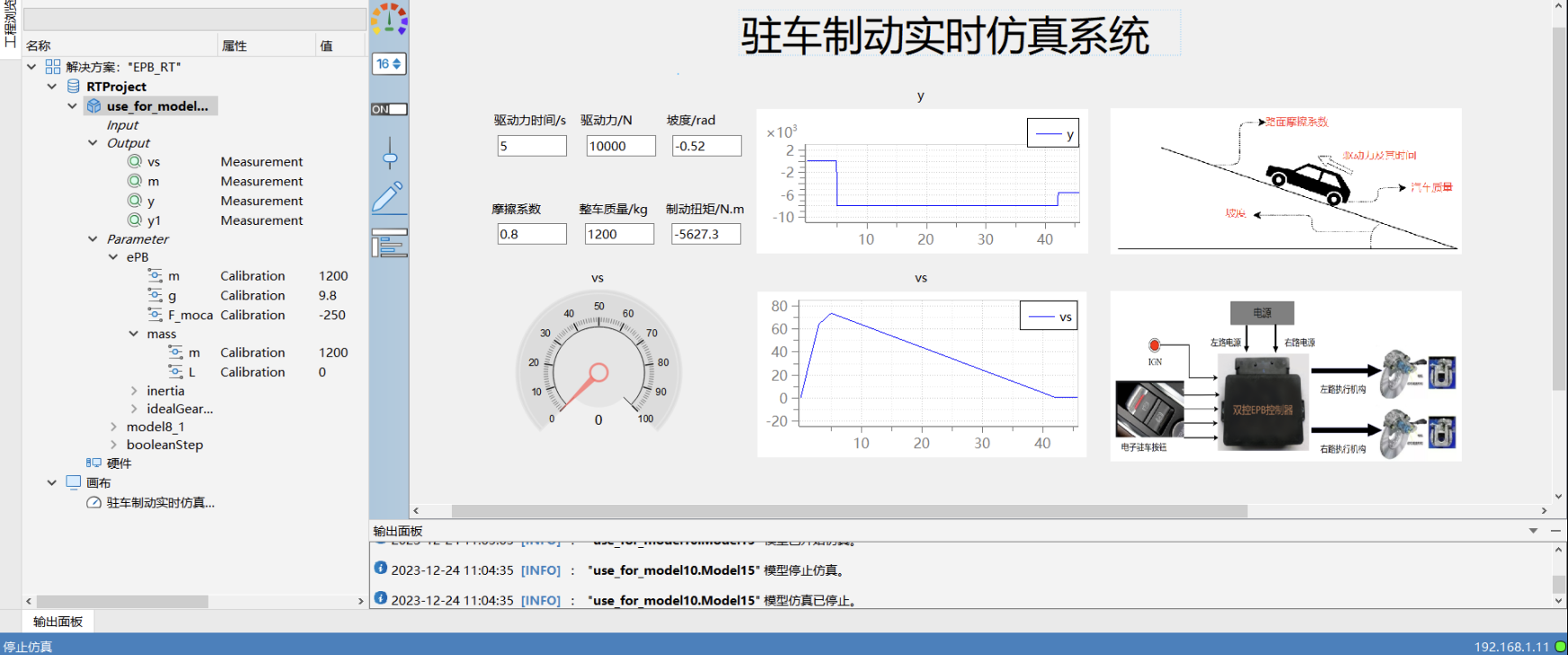
单击仿真按钮,即可在画布中进行监测变化。