# 框图建模仿真参数配置
在框图建模和仿真中,正确配置仿真参数是确保仿真准确性和效率的关键。
在框图建模环境的顶部菜单栏,进入仿真->仿真设置,弹出仿真设置对话框。
此处仅作仿真设置常规和实时页面的说明,其他细节参阅物理建模环境的仿真设置说明。
# 常规
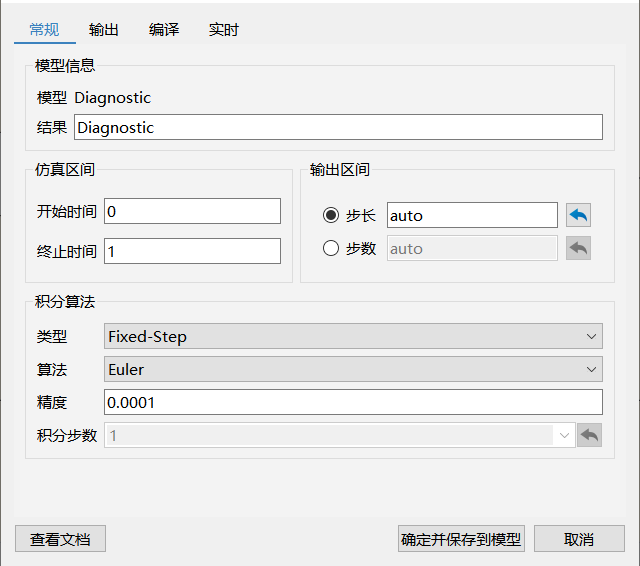
# 仿真区间
定义了仿真开始和结束的时间范围,也就是模拟系统行为的时间段。
# 基本设置
开始时间
仿真开始的时间点,通常设为 0,表示从时间 0 开始仿真。
终止时间
仿真结束的时间点,取决于系统的动态行为及仿真目的。例如,控制系统的仿真结束时间可能是 3 秒,而某些长期系统的仿真可能需要更长时间。
# 影响
短仿真区间
适用于快速响应系统,如快速控制系统、动态反馈等。此类仿真区间能帮助设计人员快速验证系统的性能。
长仿真区间
适用于长期行为分析、稳定性分析或疲劳测试等。长仿真区间可能需要更多的计算资源,并可能受到数值稳定性和精度的限制。
# 输出区间
# 基本设置
步长
仿真过程中每次积分的时间增量,也就是每一步仿真所跨越的时间。它直接影响仿真过程中系统状态的计算频率。
步数
在给定的仿真区间内,仿真过程需要进行多少次计算步骤。
# 影响
步数与计算时间
增加步长会减少仿真步数,从而减少计算量和仿真时间。减少步长则增加步数,可能导致仿真时间延长。
步数与精度
在仿真过程中,较小的步长会增加步数,通常提供更高的精度。较大的步长虽然减少了步数,但可能导致系统动态行为无法准确捕捉。
# 积分算法
在仿真过程中,积分算法直接负责解决系统的微分方程,并通过数值积分计算系统在仿真区间内的动态响应。积分算法的选择直接影响仿真精度和计算效率。
详情请参阅定步长与变步长及常见积分算法。
# 基本设置
类型
定步长(Fixed-Step)
按固定时间间隔从仿真开始到仿真结束的时间段内求解模型。
变步长(Variable-Step)
仿真过程中改变步长,在模型状态快速变化时,会减少步长以提高准确性;当模型状态变化缓慢时,增加步长以避免执行不必要的时间步。
算法
定步长与变步长以及常见积分算法的介绍,请参阅定步长与变步长及常见积分算法。
精度
指定每个仿真步长的局部精度,全局误差是由每一仿真时间步的误差通过某种方式累积而成的。
积分步数
选择变步长算法时为初始积分步长,选择定步长算法时为固定积分步长。
# 影响
精度与稳定性
算法影响结果的准确度和稳定性。更精确地算法通常计算更慢,但能提供更符合实际的结果。
计算效率与资源消耗
算法决定计算速度和需要的计算资源。
# 实时

# 仿真模式
# 独立仿真
指仿真模型在不与外部系统或硬件实时交互的情况下运行。在这种模式下,仿真模型的计算独立于物理时间或硬件运行,它可以在指定的时间区间内快速运行,仿真过程不受实际系统响应时间的影响。
# 实时同步仿真
指仿真模型与实际系统或硬件进行同步仿真。在这种模式下,仿真与实际物理系统的时间步长保持一致,仿真计算与实际系统运行紧密耦合。
# 减速比
减速比参数(也称为减速因子)是实时仿真中用于减少仿真步数的一个重要参数,尤其在于物理硬件系统接口时,减速比能够优化计算和系统响应的时间。
功能
减少计算负载
减速比控制仿真模型中计算的频率,减少实时仿真中的计算负载。在某些应用场景中,实时仿真可能需要高频率的数据采集或控制输出,减速比能有效减低系统负担。
降低时间步数
在仿真过程中,减速比决定了仿真步长与实际步长之间的比例。通过减速比,可以在不影响整体仿真精度的情况下,减少模型的仿真步数,从而提高仿真效率。
使用
在Sysblock的实时仿真设置中,可以通过调整减速比来控制仿真与外部硬件的交互速率。例如,设定减速比为 10,表示每 10 个物理时间单位才计算一次仿真结果。
减速比与采样率 减速比与模型的采样时间密切相关。在实时仿真中,设置合理的减速比可以让仿真以适当的速率与硬件系统同步,避免因过高的计算频率导致硬件资源超负荷。
常见设置
无减速(减速比 = 1):仿真每个时间步骤都计算,与物理系统时间同步。
减速模式(减速比 > 1):仿真只在每隔一定的时间步数后计算一次,如减速比为 10,表示每 10 个时间单位计算一次仿真。
减速比通常用于优化仿真过程,避免不必要的计算,特别是当仿真模型较大或需要与外部设备进行数据交换时,减速比可以减轻计算压力,提高实时仿真效率。