# 定步长与变步长及常见积分算法
定步长及变步长时两种常见的步长控制策略。
步长表示在每次积分过程中时间的增量,步长的选择对仿真结果和计算性能有重要影响。
# 概念
# 定步长(Fixed-Step)
在仿真过程中,步长保持恒定。每次计算时,时间增量是固定的。
- 优点:实现简单,计算负担均匀,适合简单或较为稳定的系统。
- 缺点:可能无法精确捕捉快速变化的动态行为,尤其是在系统中存在快速变化的非线性时。
# 变步长(Variable-Step)
步长会根据系统状态的变化动态调整,对于变化较快的部分,步长缩短;对于变化较慢的部分,步长增大。
- 优点:能够在保证精度的情况下提高计算效率,适合复杂和非线性系统。
- 缺点:计算复杂度较高,可能导致不稳定的结果,尤其是在步长调整不当时。
# 常见积分算法
不同的积分算法适用于不同类型的系统。常见的积分算法有:
欧拉算法(Euler's Method)
- 最简单的积分方法,适用于初步仿真和较为简单的系统。
- 特点:适合较简单、变化不大的系统,计算较为高效。
- 缺点:对于具有强烈非线性或快速变化的系统,精度较差。
- 最简单的积分方法,适用于初步仿真和较为简单的系统。
龙格-库塔算法(Runge-Kutta Method)
- 一种更高精度的积分方法,通常用于需要较高精度的仿真。
- 特点:适用于要求高精度的系统,能够更准确地捕捉系统的动态行为。
- 缺点:计算复杂度较高,速度相对较慢。
- 一种更高精度的积分方法,通常用于需要较高精度的仿真。
变步长算法(例如 ode45)
- 常见的变步长算法,适用于复杂的系统,能够根据系统行为自适应地调整步长。
- 特点:自动调整步长,适应系统状态的变化,具有较高的灵活性和精度。
- 缺点:可能出现数值不稳定的问题,尤其在系统不平稳或者步长调整不当时。
- 常见的变步长算法,适用于复杂的系统,能够根据系统行为自适应地调整步长。
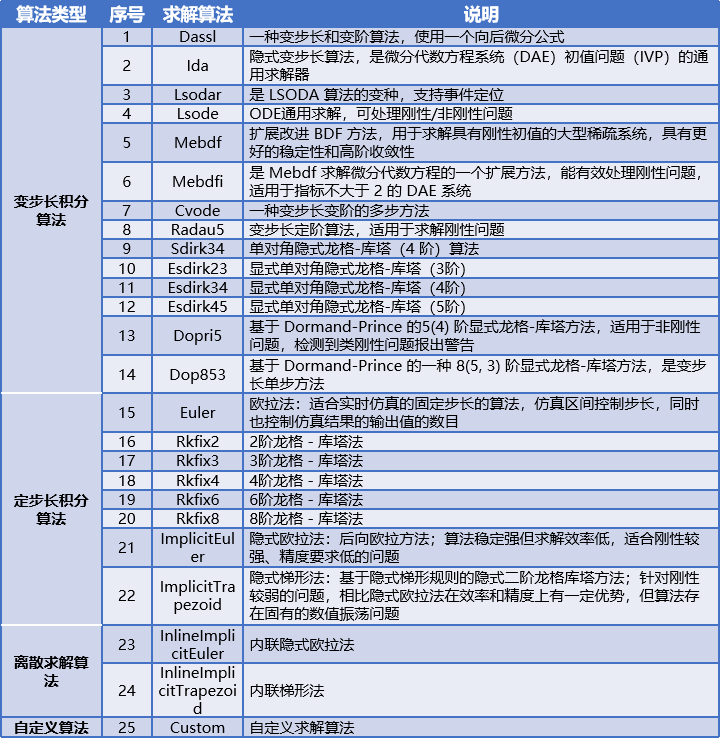
以下是框图建模环境支持的算法完整列表,请参考:
# 精度与误差控制
精度(Accuracy)
- 指的是仿真结果的近似程度,即数值解与真实解之间的差距。提高精度通常需要选择更精确地算法(如高阶龙格-库塔算法)和较小的步长。
误差控制
- 在变步长算法中,误差控制非常重要。仿真程序通常会动态调整步长以控制误差,确保系统状态的准确性。
- 误差控制一般由算法自动进行,但也可以通过调整相关参数来优化精度。