# azel2phitheta
将方位/仰角形式的角度转换为 phi/theta 形式
函数库: TyPhasedArray
# 语法
PhiTheta = azel2phitheta(Phi, Theta)
PhiTheta = azel2phitheta(Phi, Theta, RotAx)
# 说明
PhiTheta = azel2phitheta(Phi, Theta) 将方位角/仰角对转换为它们对应的 phi/θ 角。 示例
PhiTheta = azel2phitheta(Phi, Theta, RotAx) 使用 RotAx 进行 phi/θ 角度限定。 示例
# 示例
将方位/仰角坐标转换为 Phi/Theta 坐标
找到 30° 方位角和 10° 仰角的 φ-θ 表示,其中 φ 是从 y 轴到 z 轴定义的,θ 是从 x 轴到 yz 平面定义的。
using TyPhasedArray
PhiTheta = azel2phitheta(30, 10)
PhiTheta = 2-element Vector{Float64}:
19.425400140682818
31.4749488891855
方位/仰角坐标转为Phi/Theta坐标
根据惯例,找到 30° 方位角和 10° 仰角的 φ-θ 表示,其中 φ 从 x 轴到 y 轴定义,θ 从 z 轴到 xy 平面定义。
using TyPhasedArray
PhiTheta = azel2phitheta(30, 10, false)
PhiTheta = 2-element Vector{Int64}:
30
80
# 输入参数
Phi - φ 角标量 | 行矩阵
Phi 角,指定为标量或行矩阵。矩阵的每一列表示一个以度为单位的角度。
Theta - θ 角标量 | 行矩阵
Theta 角,指定为标量或行矩阵。矩阵的每一列表示一个以度为单位的角度。
RotAx - Phi-theta 角度约定选择true(默认值)| false
Phi-theta 角度约定选择,指定为 true 或 false。
- 如果 RotAx 为真,则从 y 轴到 z 轴定义 phi 角,从 x 轴到 yz 平面定义 θ 角。
- 如果 RotAx 为 false,则定义从 x 轴到 y 轴的 phi 角,定义从 z 轴到 xy 平面的 θ 角。
# 输出参数
PhiTheta - Phi/Theta行矩阵
Phi 和 θ 角,作为两行矩阵返回。矩阵的每一列表示一个以度为单位的角度,其形式为 [φ; θ]。
# 更多
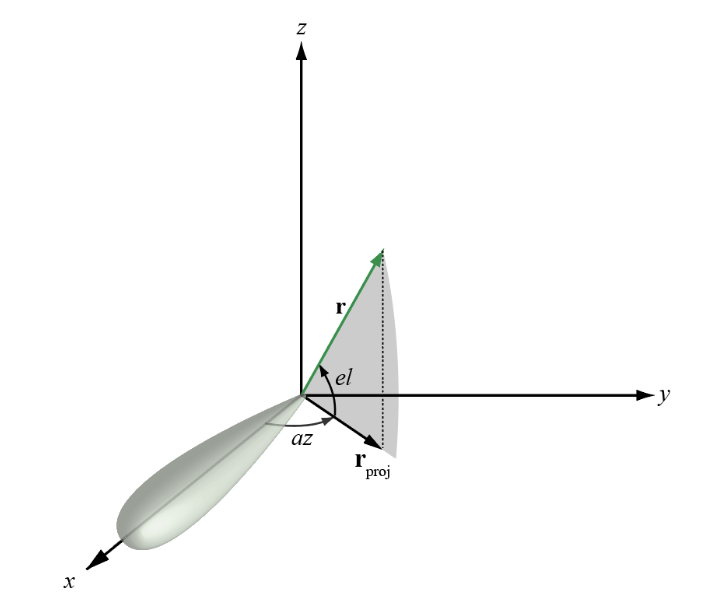
方位角和仰角
向量的方位角是 x 轴和向量在 xy 平面上的正交投影之间的角度。从 x 轴到 y 轴的角度是正的。方位角介于 –180 度和 180 度之间。仰角是向量与其在 xy 平面上的正交投影之间的角度。从 xy 平面朝向正 z 轴时,角度为正。默认情况下,元素或阵列的轴线方向与正 x 轴对齐。瞄准线方向是元件或阵列的主瓣的方向。
TIP
文献中有时将仰角定义为向量与正 z 轴的夹角。julia 和相控阵系统工具箱产品不使用此定义。
此图显示了以绿色实线显示的向量的方位角和仰角。
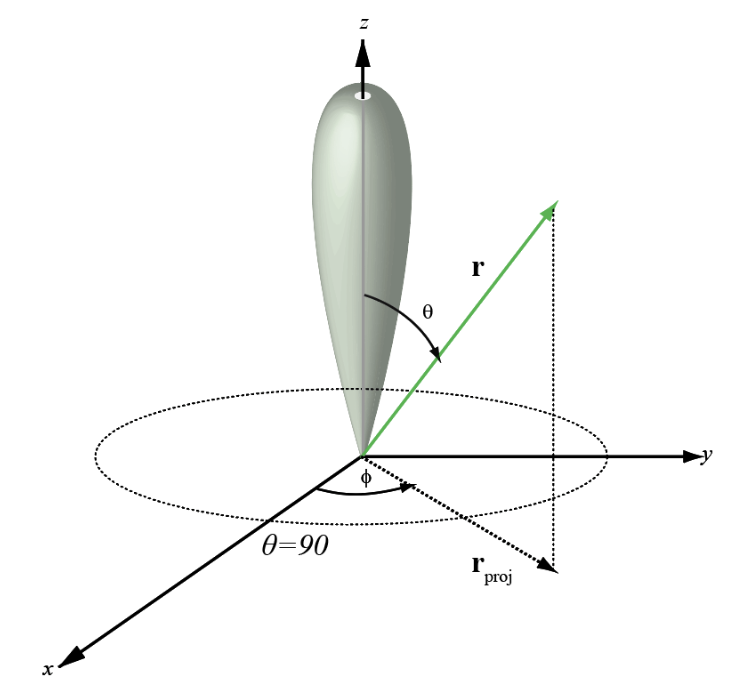
Phi 角和 Theta 角
该图显示了以绿色实线显示的向量的 phi 和 theta。
φ/θ 和 az/el 之间的坐标变换由以下方程描述
当 RotAx 为 true 时,此转换适用。
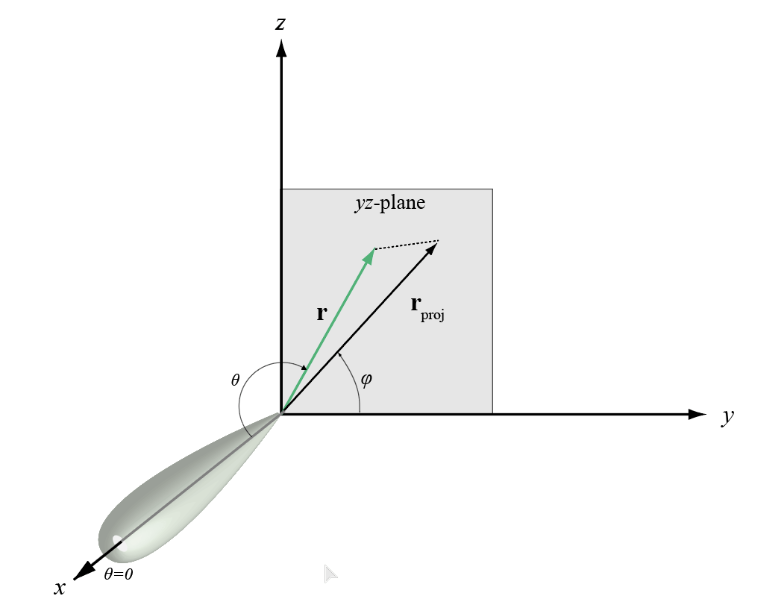
Phi 角和 Theta 角的替代定义
该图显示了以绿色实线显示的向量的