# bwulterode
极限滤波
函数库: TyImageProcessing
# 语法
BW2 = bwulterode(BW)
BW2 = bwulterode(BW,method)
BW2 = bwulterode(___,conn)
# 说明
BW2 = bwulterode(BW) 计算二值图像 BW 的终极腐蚀。BW 的终极腐蚀由其补集的欧氏距离变换的区域最大值组成。示例
BW2 = bwulterode(BW,method) 可以指定距离变换的方法。
BW2 = bwulterode(___,conn) 可以指定像素的连接方式。
# 示例
执行二值图像的最终侵蚀
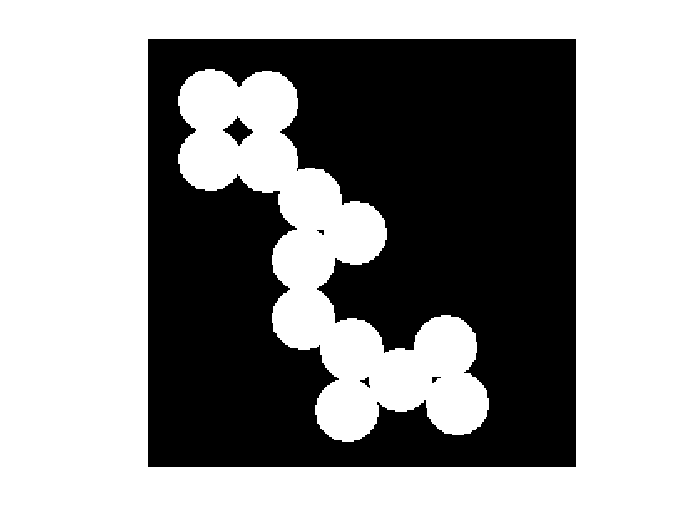
读取一个二值图像到工作空间,并显示它。
using TyImageProcessing
using TyPlot
originalBW = imread("circles.png");
imshow(originalBW)
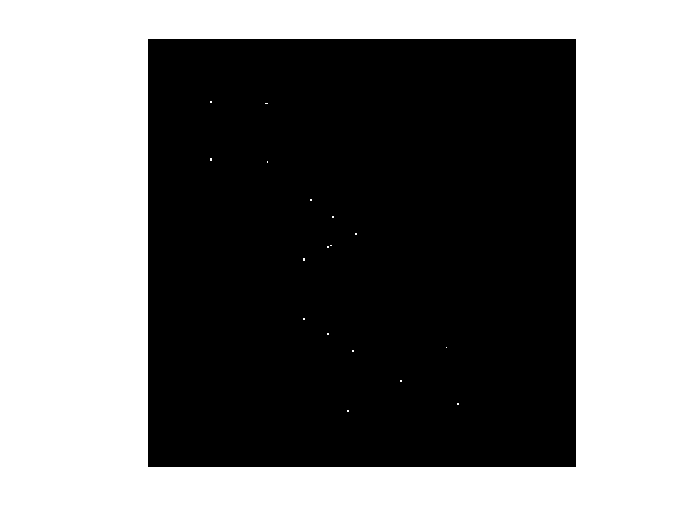
对图像执行终极腐蚀操作,并显示结果。
ultimateErosion = bwulterode(originalBW);
figure(), imshow(ultimateErosion)
# 输入参数
BW — 二值图像数值数组 | 逻辑数组
二值图像,指定为二维的数值或逻辑数组。对于数值输入,任何非零像素都被视为 1 (true)。
数据类型: Float32 | Float64 | Int8 | Int16 | Int32 | Int64 | UInt8 | UInt16 | UInt32 | UInt64 | Bool
method — 距离度量"euclidean" (默认) | "chessboard" | "cityblock" | "quasi-euclidean"
距离度量,指定为下列值之一。
| 方法 | 描述 |
|---|---|
"chessboard" | 在二维中,(x1,y1) 和 (x2,y2) 之间的棋盘距离为 max(│x1 – x2│,│y1 – y2│) |
"cityblock" | 在二维空间中,(x1,y1) 和 (x2,y2) 之间的城市街区距离为 │x1 – x2│ + │y1 – y2│ |
"euclidean" | 在二维空间中,(x1,y1) 和 (x2,y2) 之间的欧几里德距离为 √((x1−x2)^2+(y1−y2)^2) |
"quasi-euclidean" | 在二维空间中,(x1,y1) 和 (x2,y2) 之间的准欧几里德距离为 ∣x1−x2∣+(√2−1)∣y1−y2∣, ∣x1−x2∣>∣y1−y2∣ (√2−1)∣x1−x2∣+∣y1−y2∣, otherwise |
数据类型: String
conn — 像素连通性4 | 8 | 6 | 18 | 26 | 由 0 和 1 组成的 3×3×...×3 矩阵
像素连通性,指定为下表中的值之一。对于二维图像,默认连通性是 8,对于三维图像,默认连通性是 26。
二维连通
| 值 | 意义 | |
|---|---|---|
4 | 如果像素的边缘相互接触,则这些像素具有连通性。如果两个相邻像素都为 on 并在水平或垂直方向上连通,则它们是同一对象的一部分。 |  当前像素以灰色显示。 |
8 | 如果像素的边缘或角相互接触,则这些像素具有连通性。如果两个相邻像素都为 on 并在水平、垂直或对角线方向上连通,则它们是同一对象的一部分。 |  当前像素以灰色显示。 |
三维连通(暂不支持)
| 值 | 意义 | |
|---|---|---|
6 | 如果像素的面接触,则这些像素具有连通性。如果两个相邻像素都为 on 并以如下方式连通,则它们是同一对象的一部分: - 在所列方向之一上连通:内、外、左、右、上、下 |  当前像素是立方体的中心。 |
18 | 如果像素的面或边缘接触,则这些像素具有连通性。如果两个相邻像素都为 on 并以如下方式连通,则它们是同一对象的一部分: - 在所列方向之一上连通:内、外、左、右、上、下 - 在两个方向的组合上连通,如右下或内上 |  当前像素是立方体的中心。 |
26 | 如果像素的面、边缘或角接触,则这些像素具有连通性。如果两个相邻像素都为 on 并以如下方式连通,则它们是同一对象的一部分: - 在所列方向之一上连通:内、外、左、右、上、下 - 在两个方向的组合上连通,如右下或内上 - 在三个方向的组合上连通,如内右上或内左下 |  当前像素是立方体的中心。 |
对于更高的维度,imregionalmin 使用默认值 conndef(ndims(BW),"maximal")。
也可以通过指定由 0 和 1 组成的 3×3×...×3 矩阵,以更通用的方式来定义任意维度的连通性。值为 1 的元素定义相对于 conn 的中心元素的邻域位置。请注意,conn 必须关于其中心元素对称。
数据类型: Int64
# 输出参数
BW2-腐蚀后的图像逻辑数组
腐蚀后的图像,返回和 BW 相同尺寸大小的逻辑数组。
数据类型: Bool