# 飞机纵向飞行控制
# 引言
此示例针对飞机的纵向运动建立了一个飞行控制算法模型。
单击右侧打开示例按钮,在 Sysplorer 中打开示例文件。
# 飞机纵向飞行控制分析
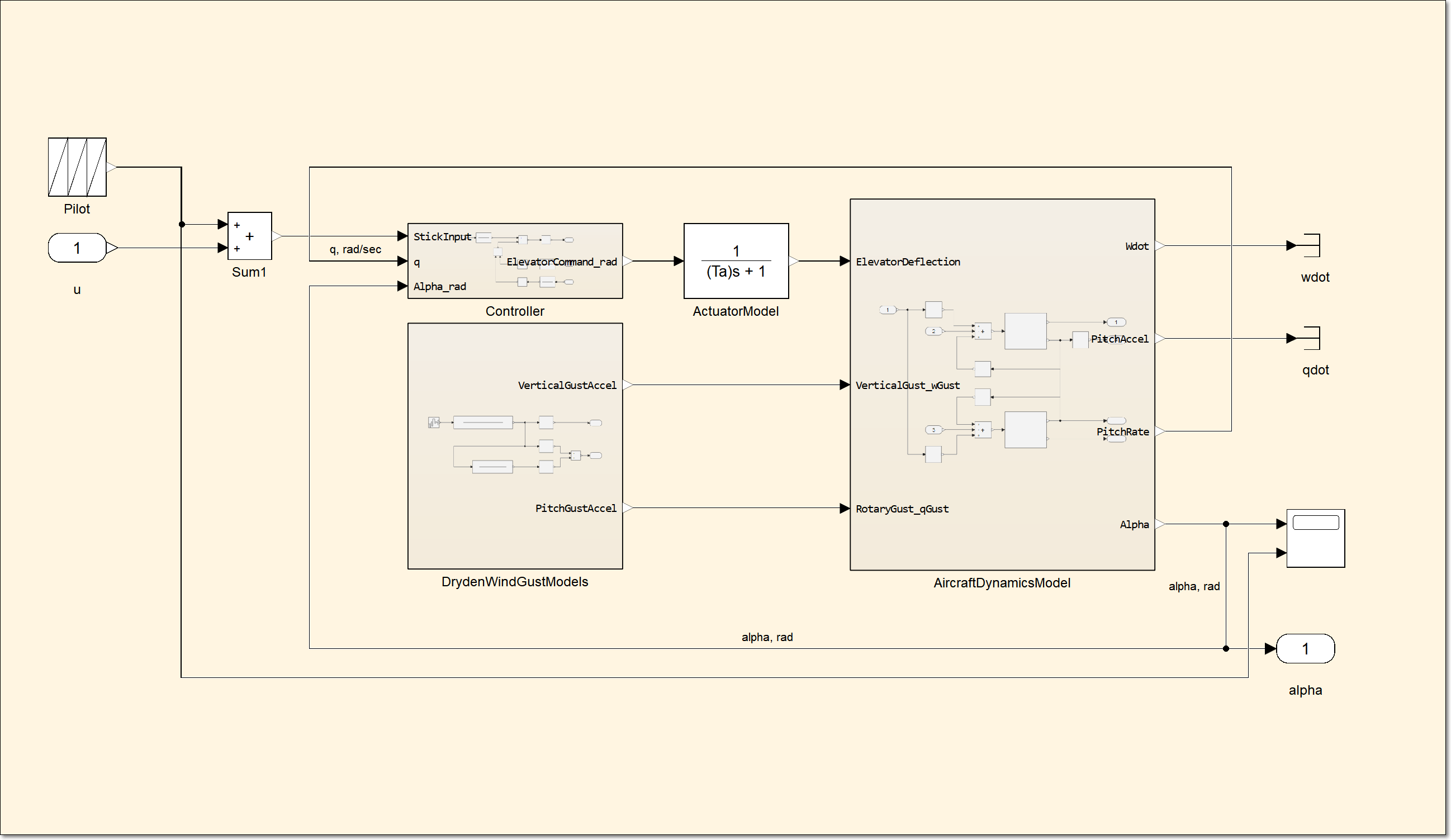
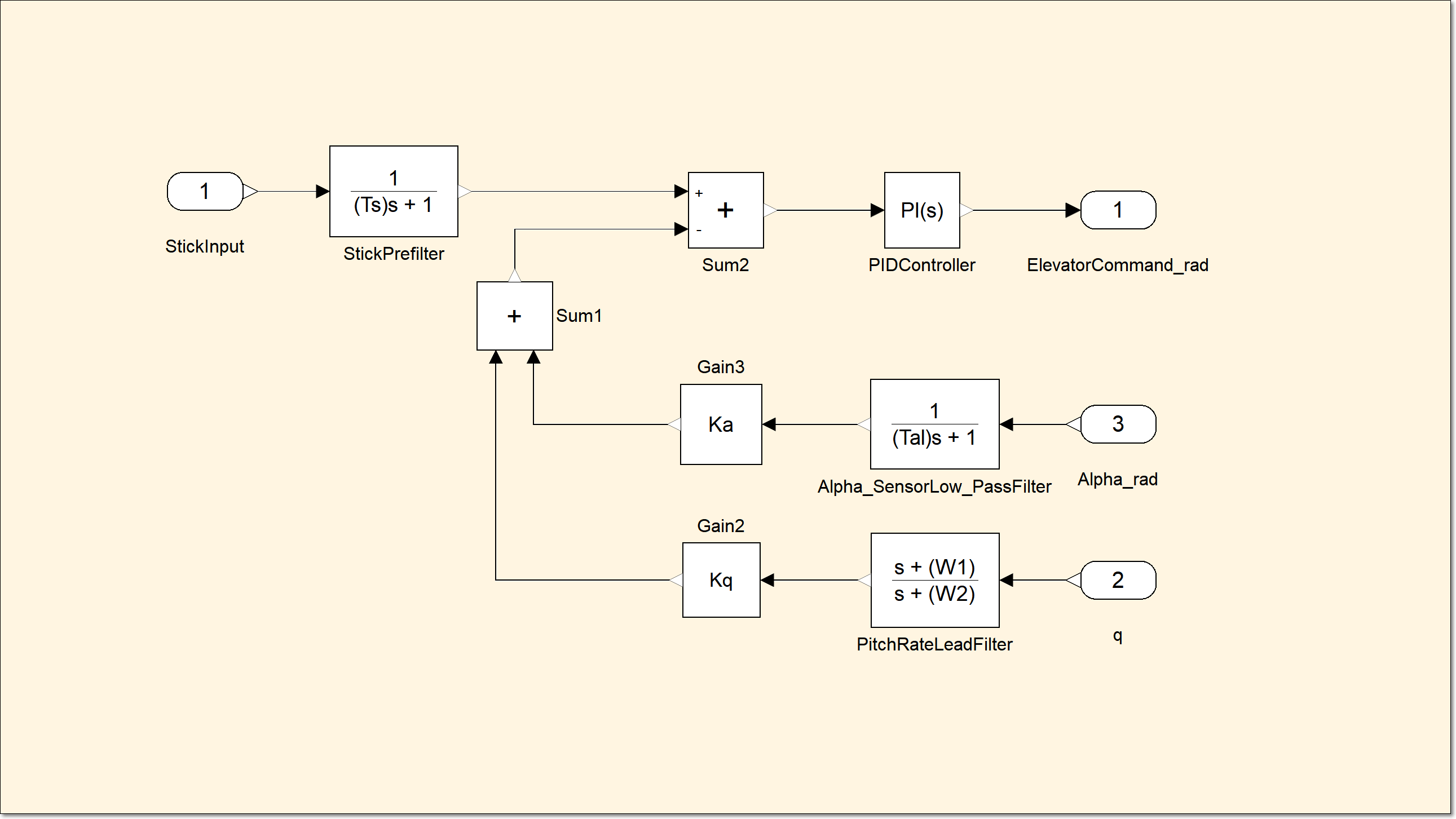
本模型基于飞机与作动器的一阶线性化模型,用于进行飞行控制设计的仿真。控制器的核心逻辑在 Controller 子系统中实现:其控制目标是使飞机的俯仰姿态跟踪操纵杆的指令;实现方法则是根据飞机实时反馈的俯仰角与俯仰速率,计算出最终的控制指令。
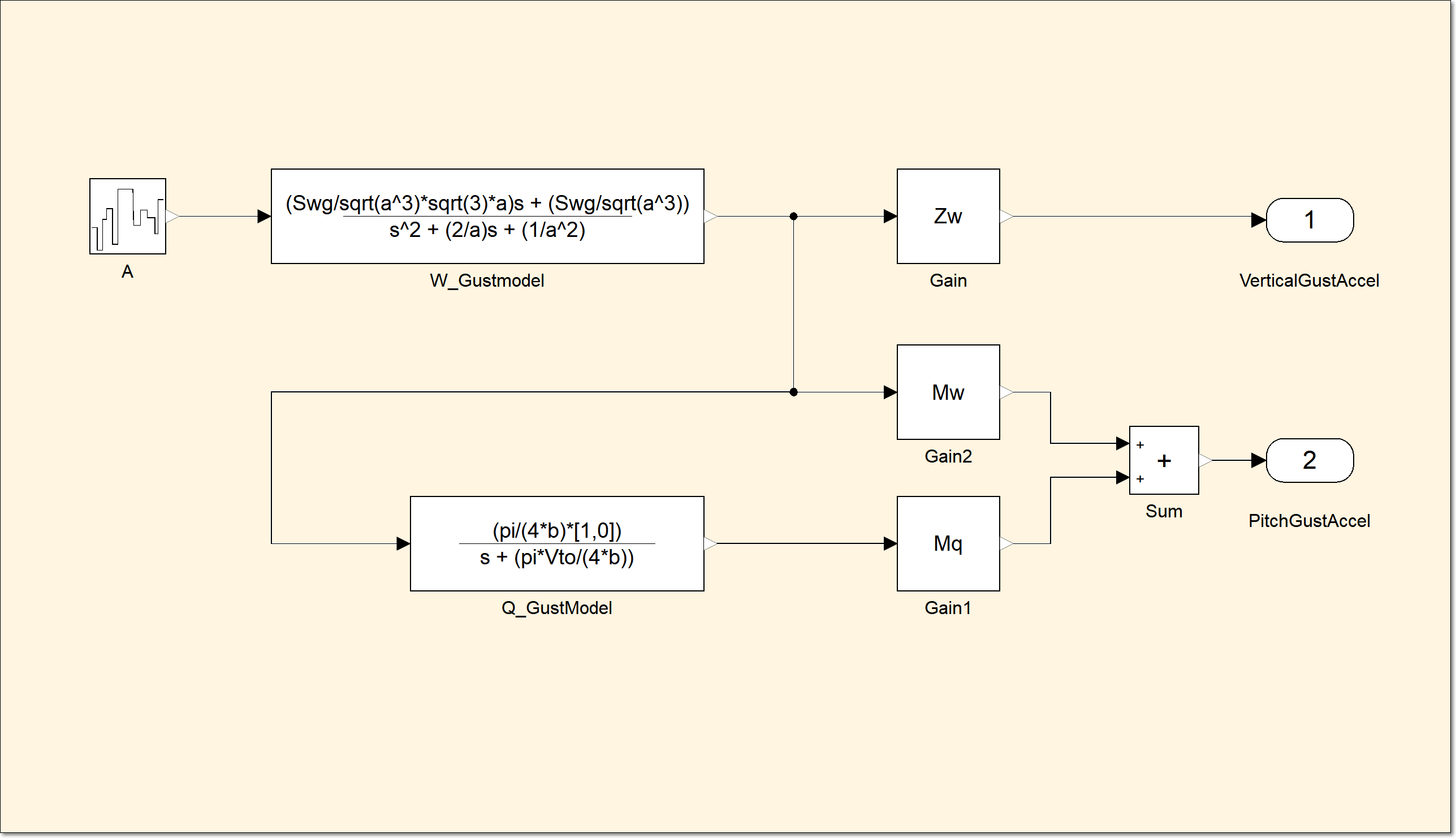
此外,DrydenWindGust 子系统通过一个简化的大气紊流模型向系统注入扰动,用以评估飞行控制在风扰条件下的动态响应与鲁棒性。
# 仿真设置
在进行仿真之前需要进行仿真设置,在软件上方功能区,单击主页 > 仿真设置按钮,打开仿真设置界面。在该界面设置开始时间 0,终止时间 60,输出区间步长 auto。积分算法的类型设置为变步长,算法为 Dassl(BDF,变阶,刚性),容差 0.0001,初始积分步长 Default,单击确定并保存到模型。

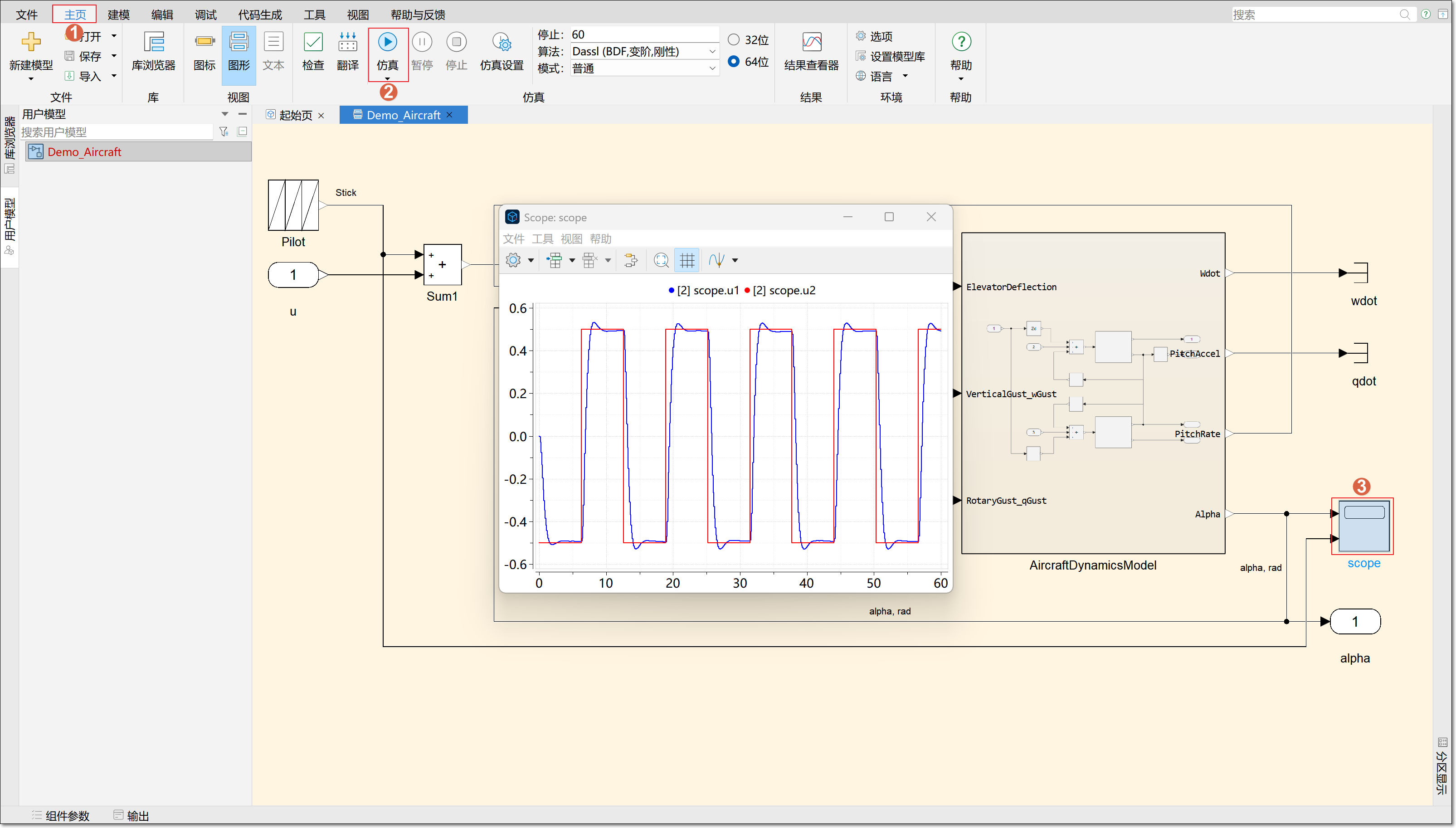
# 仿真运行
单击主页 > 仿真,等待仿真运行结束,双击 scope 模块查看仿真结果,通过对比 Stick(操纵杆俯仰指令)与 Alpha(飞机实际迎角)的曲线,可以分析控制系统对指令的跟踪效果与动态响应。