# 车辆减震系统控制系统设计
使用模型控制系统设计介绍车辆减震系统的响应速度和超调量优化过程。
本教程中,您将了解如何基于 Modelica 模型,对其进行线性化,并将得到的数学模型作为被控对象,对其进行控制系统设计。本文介绍了使用控制系统设计器工具箱如何进行线性化和控制系统设计。
# 加载 Modelica 模型
默认工作点处对模型进行线性化,加载
模型。# 分析模型
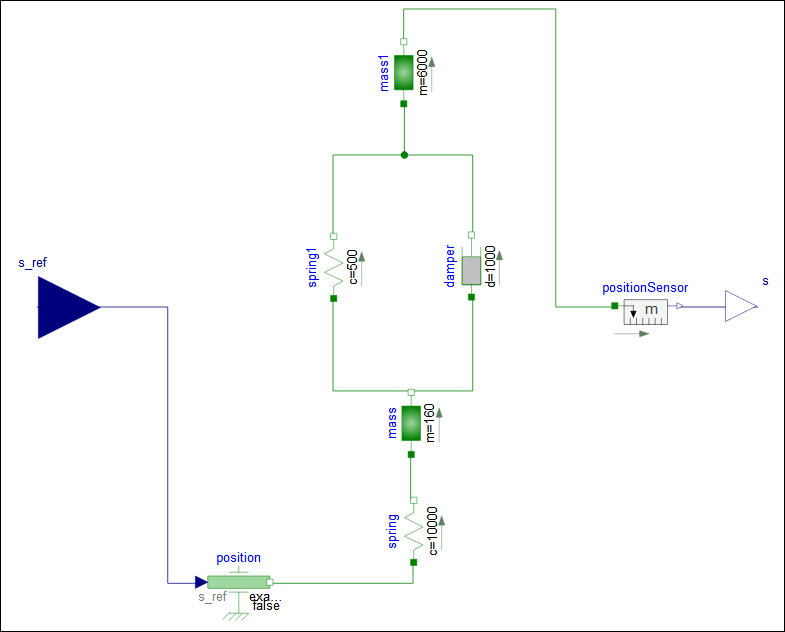
如下图所示,这是一个由质量块、弹簧和阻尼构成的简易减震系统模型,且忽略接触面摩擦力。
在 Sysplorer 中,对该减震系统添加阶跃信号和反馈后对其进行仿真,模型为
。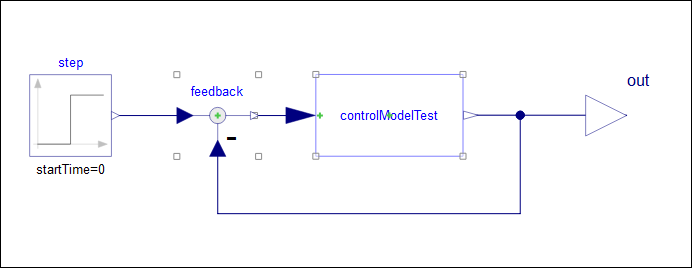
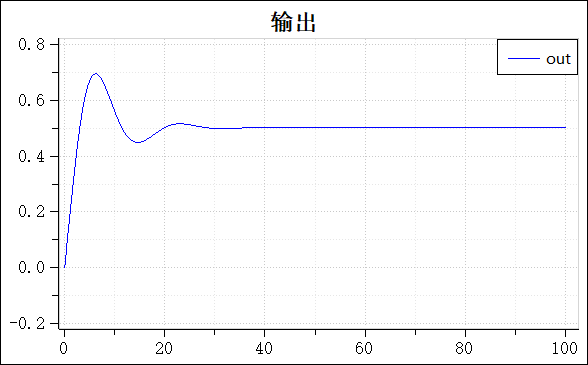
根据默认条件进行仿真,得到的响应曲线显示系统存在响应速度慢和超调量大的问题。因此,需要使用控制系统设计器对系统进行线性化处理,并基于线性化后的数学模型设计控制器,以获得补偿器。
# 调用控制系统设计进行线性化
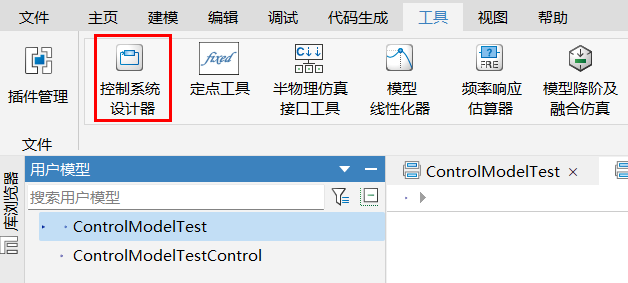
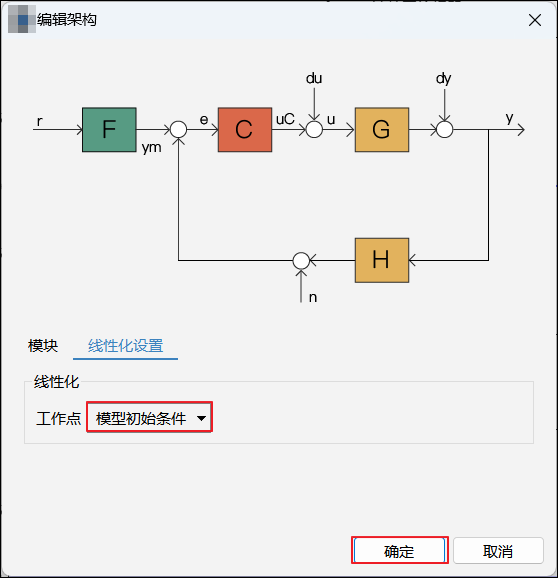
单击工具 > 控制系统设计器,打开控制系统设计器工具箱窗口后,默认弹出编辑架构 > 线性化设置页面。
线性化位置默认为模型初始条件,单击确定开始线性化。
提示
默认线性化工作点为模型初始条件,用户可切换下拉列表自定义线性化位置。
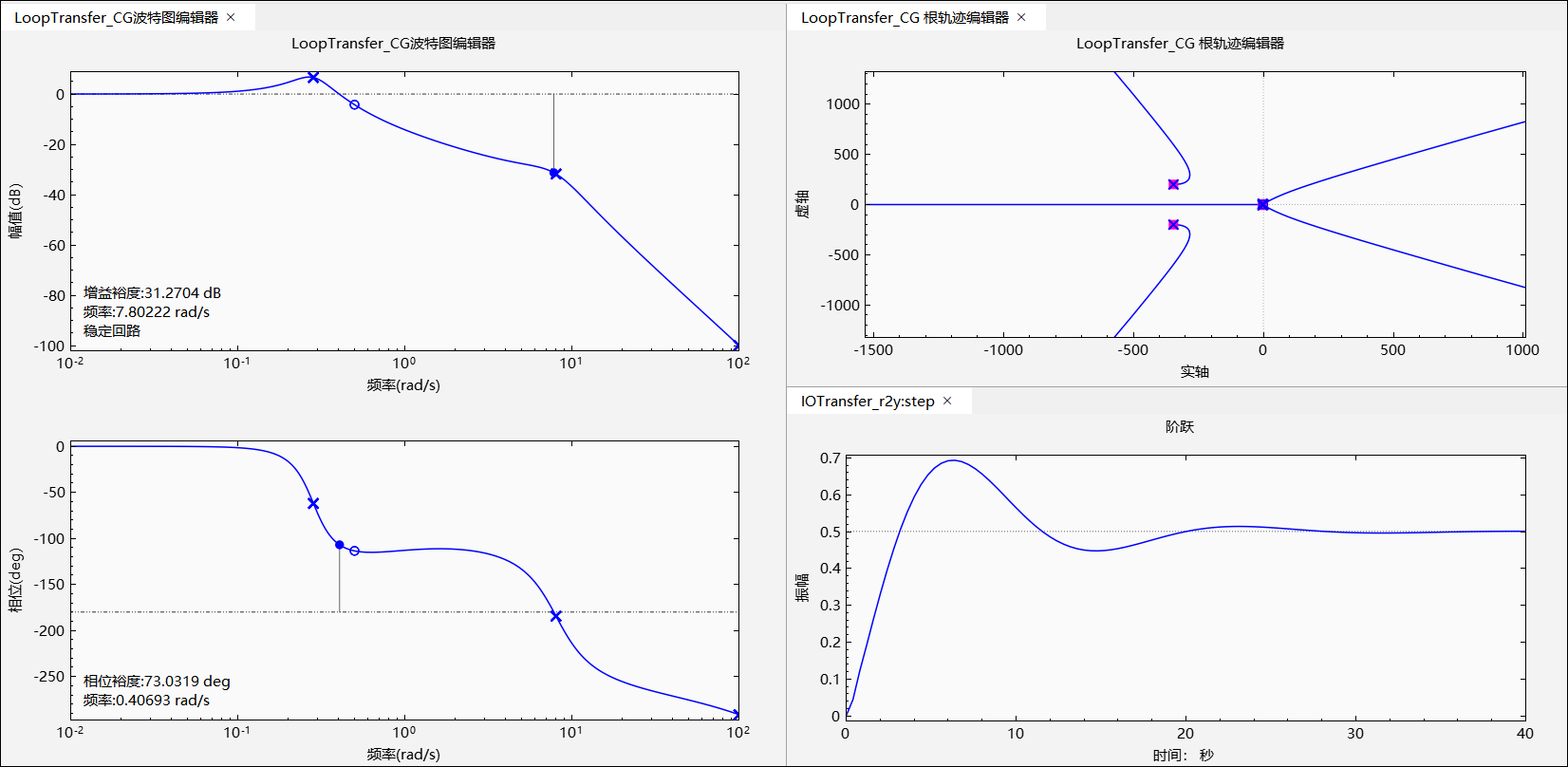
线性化完成后,线性化结果会赋值给固定模块 G。同时,中央视图中的波特图曲线、根轨迹和阶跃响应曲线会刷新。
提示
G 系统为被控对象,作为控制系统设计的固定模型。线性化完成后,线性控制模型自动赋值给 G 系统。 根轨迹编辑器窗口结果不对时,请重新点击完整视图显示。
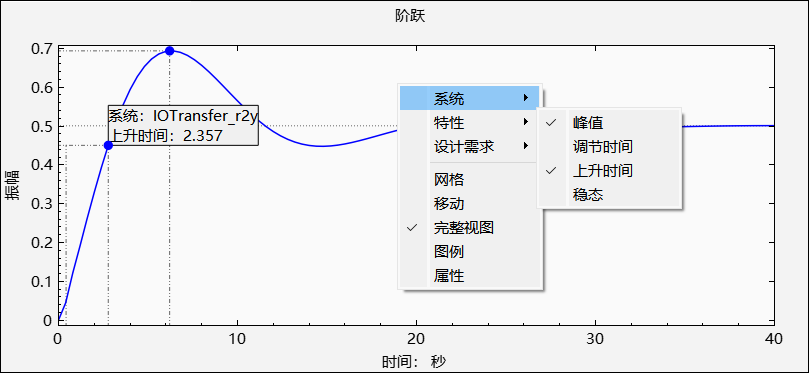
右击阶跃响应图,弹出上下文菜单,选择特性 > 上升时间,单击图上特性点查看特性点详情。
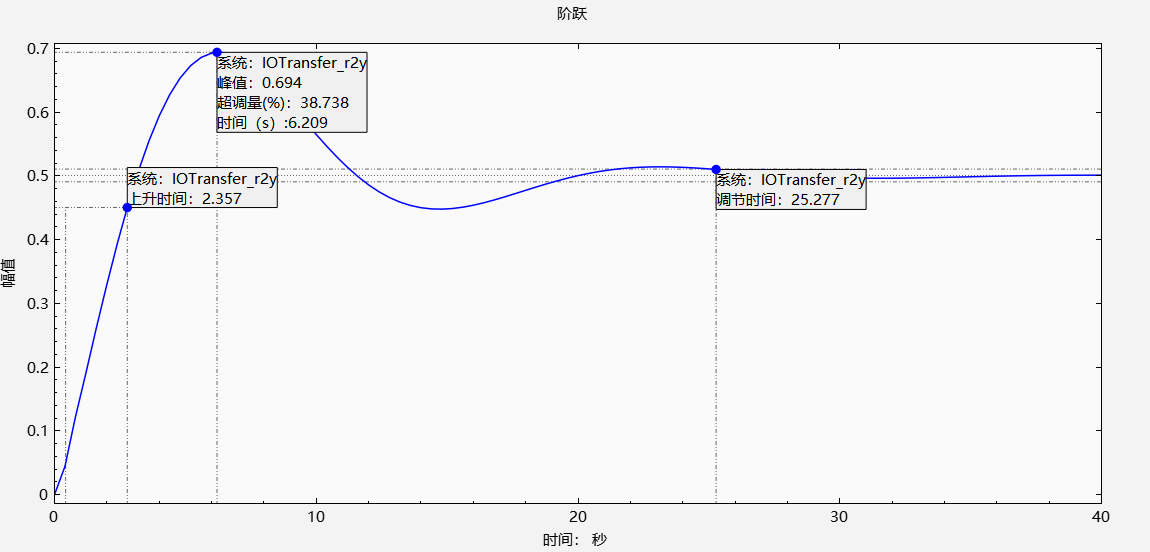
此外在打开特性中的峰值和调节时间,点击图中数据点,结果如下图所示,闭环系统的上升时间为 2.357 秒,调节时间为 25.277 秒,超调量为 38.738%。由于响应时间慢,超调量大,需要通过设计补偿器对 G 系统进行校正。
# 对 G 系统进行控制系统设计获取补偿器
在本示例中,G 系统需要满足以下响应要求:超调量小于 20%。
因此需要设计补偿器对控制系统 G 进行校正,具体设计步骤如下所示:
# 新建设计需求
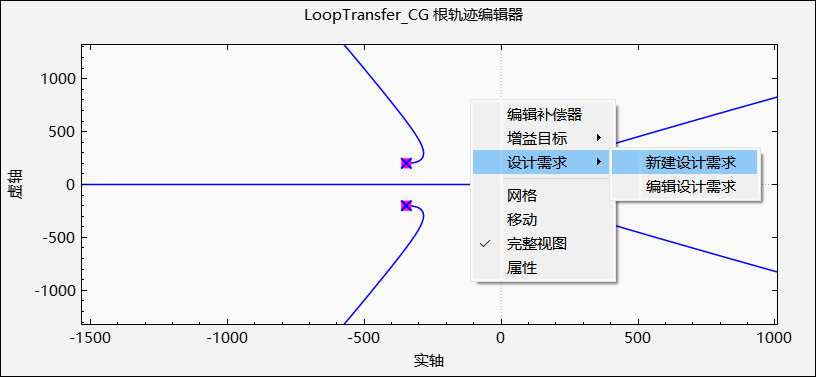
在根轨迹编辑器中添加设计需求。右击根轨迹编辑器绘图区域,并选择设计需求 > 新建设计需求,弹出新建设计需求页面。
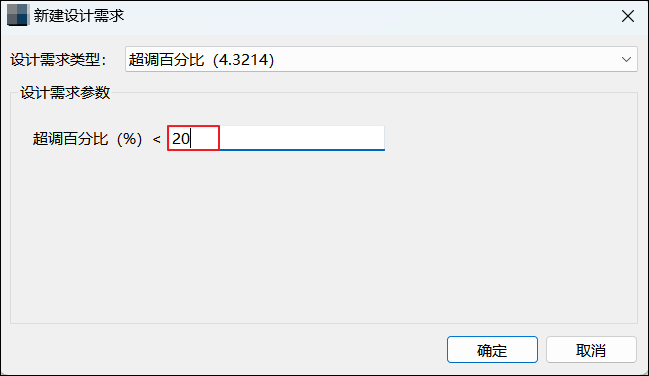
在设计需求类型下拉列表中,选择超调百分比(4.3214),设置超调百分比小于 20%,单击确定,完成新建设计需求。
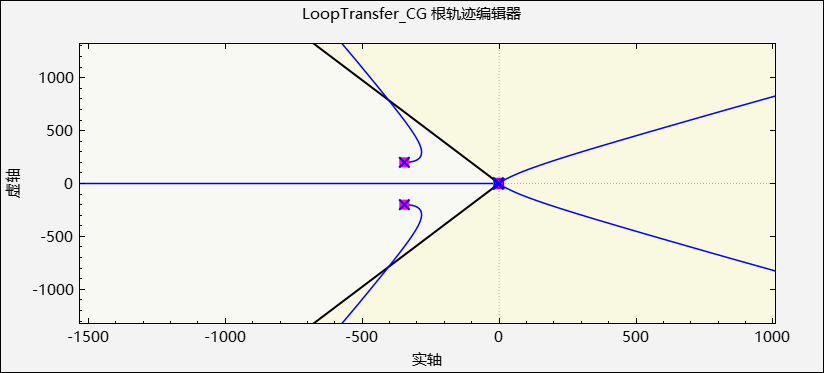
如下图所示,黄色区域为根轨迹的限制区域。通过设计补偿器,根轨迹的零极点需要限制在黄色区域之外。
# 调节补偿器编辑器
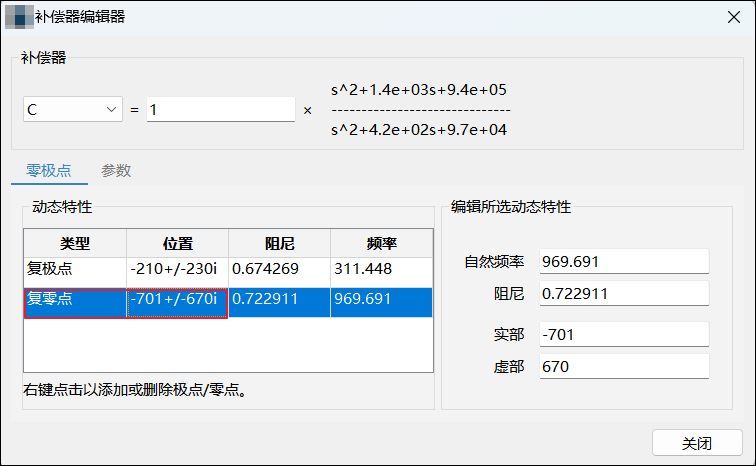
当前超调量为 38.738%,为了降低超调量,可以在开环回路上增加一对共轭极点。在根轨迹编辑器上,右击选择编辑补偿器,打开补偿器编辑器,为补偿器 C 增加一对复极点,设置实部为 -210,虚部为 230,按 Enter 键立即生效。
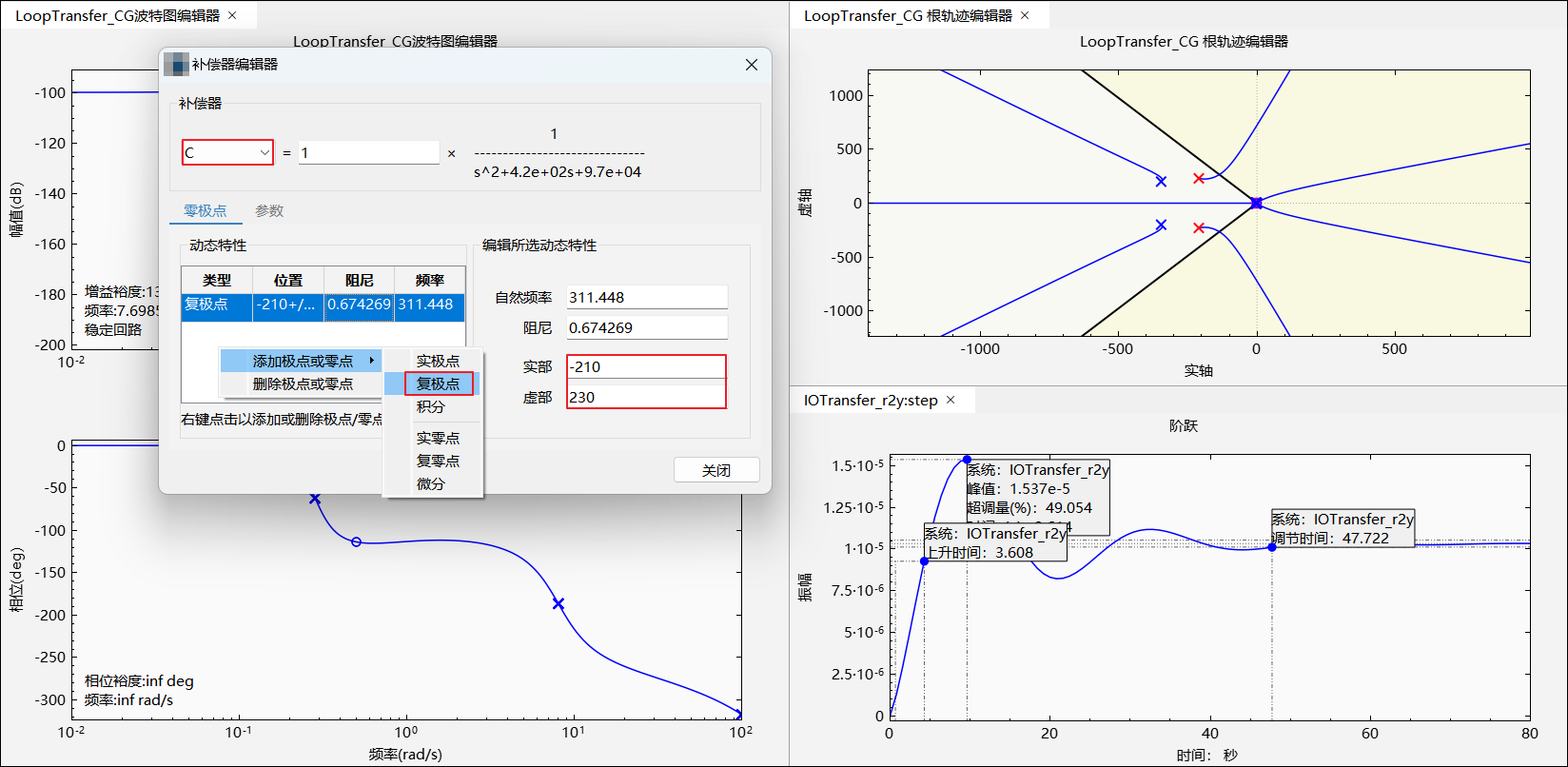
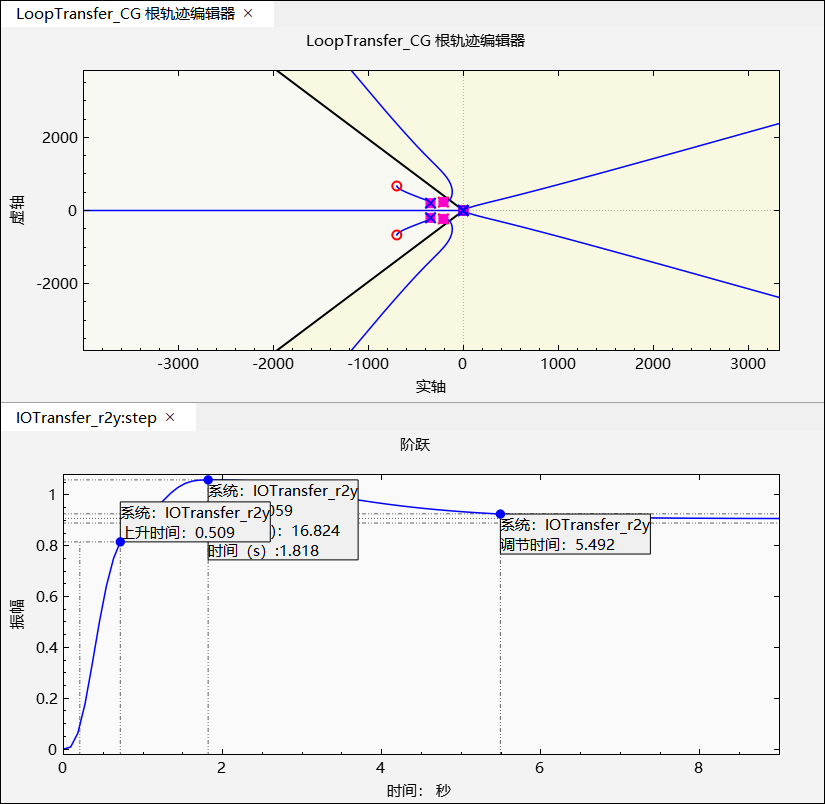
查看阶跃图上的特性,此时上升时间为 3.6 秒,调节时间为 47.7 秒。上升速度慢,调节时间长,同时振幅减少导致系统更加灵敏,使得超调变大。为了增大放大倍数和提高闭环系统的响应速度,可以在开环回路上增加共轭零极,设置实部为 -701,虚部为 670。
设计补偿器是一个不断试验和调整的过程,通过上述操作,对补偿器配置了零极点。右击阶跃响应图,选择特性 > 上升时间,显示上升时间 0.5 秒左右,选择特性 > 峰值,超调量为 17% 左右,系统响应满足所有设计要求。
提示
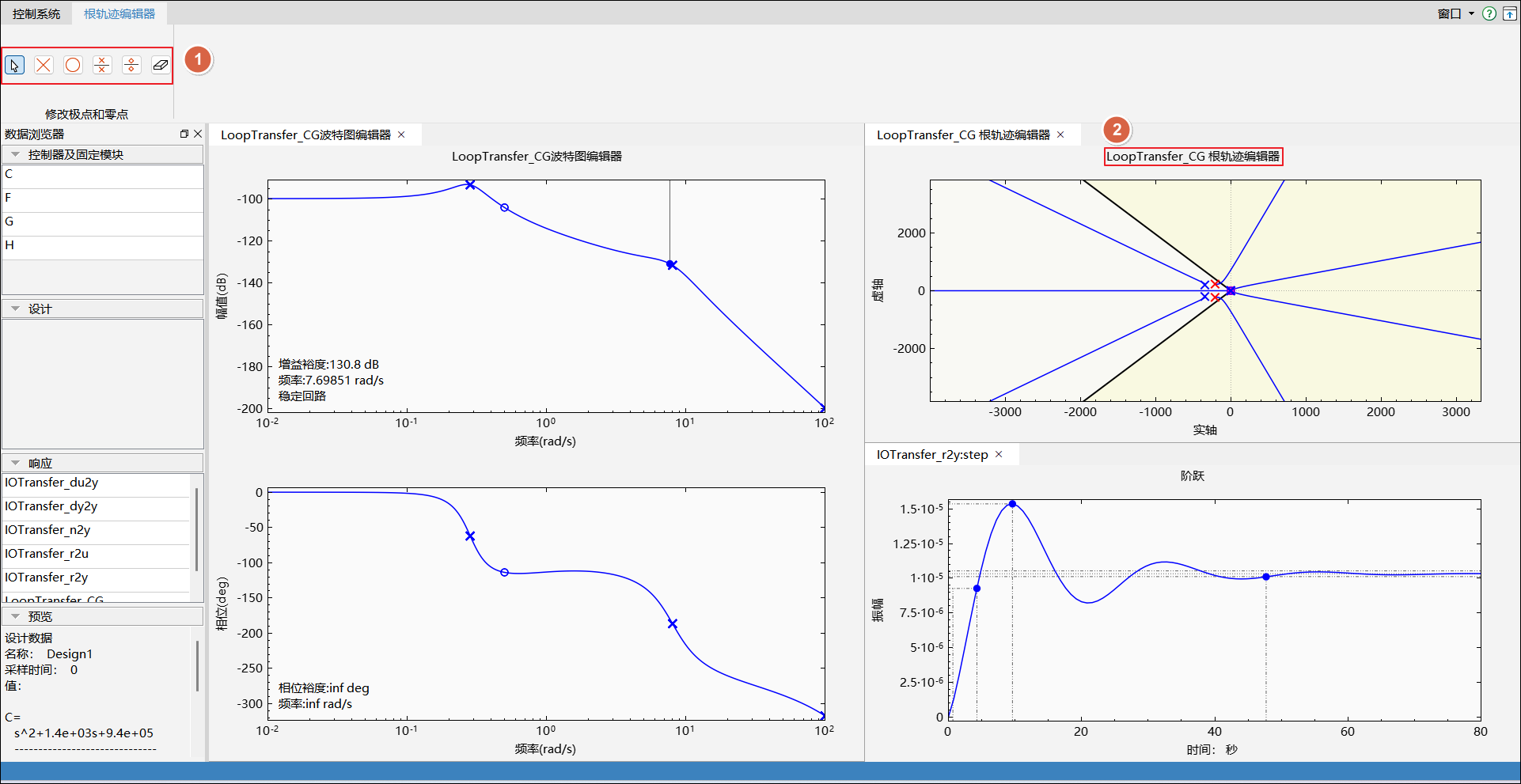
控制系统设计器同时提供图形化的功能设计补偿器,以根轨迹编辑器为例,可以单击根轨迹编辑器绘图窗口,菜单栏出现根轨迹编辑器,通过菜单栏的按钮直接在图上添加、移动和删除零点、极点。
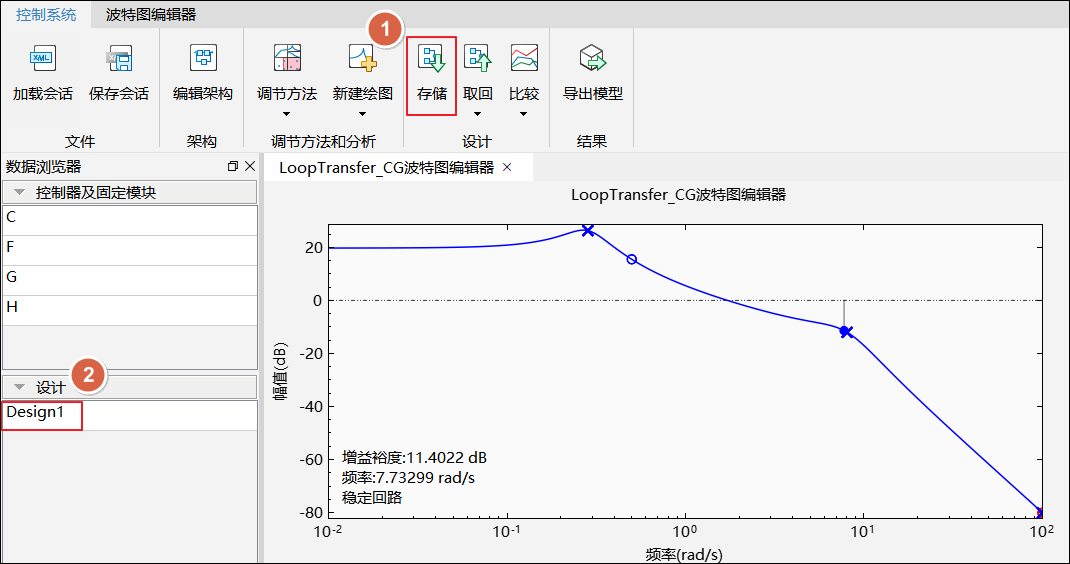
# 保存当前设计
单击存储按钮,存储当前设计。存储后会显示在数据浏览器的设计列表,默认名称为 Design1。
用户可构造多个设计并存储,同时本工具箱提供对比设计的功能,用户可比较不同设计的响应曲线。
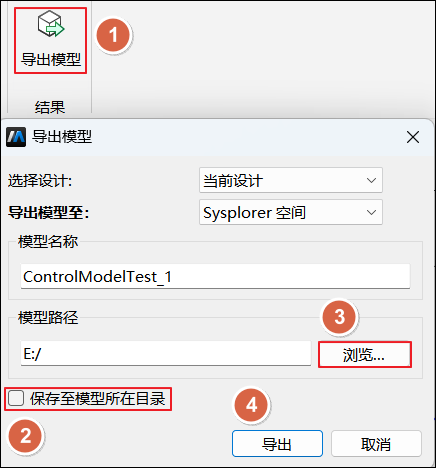
# 导出补偿器
单击导出模型,打开导出模型面板。选择设计的下拉框选择当前设计,可自定义选择导出路径。单击导出,补偿器 C 导出至 Sysplorer 用户模型列表。
在 Sysplorer 平台的用户模型列表中,选中导出的模型,单击组件查看模型的传递函数。
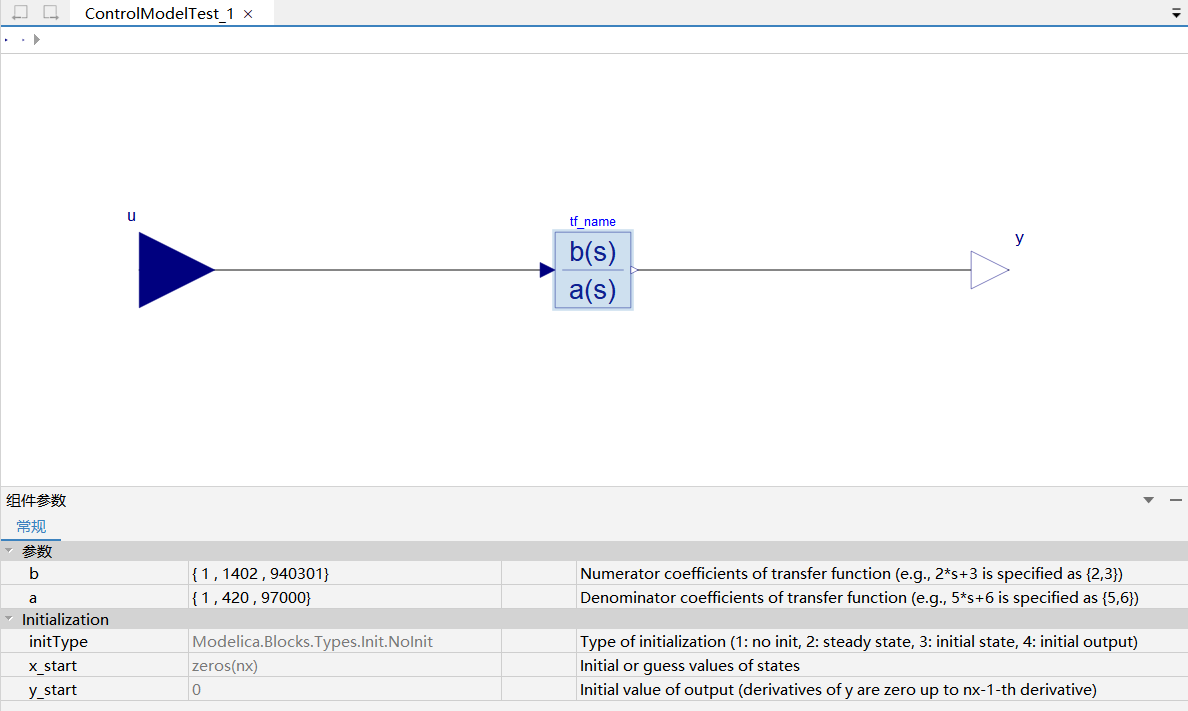
如上图所示,传递函数为
;与控制系统设计中的当前设计的补偿器 C 传递函数一致。 用户可将补偿器与被控对象相连,构建新的模型进行仿真、线性化和控制系统设计等操作。
提示
当前版本仅支持单输入单输出(SISO)被控对象,且设计的补偿器也为单输入单输出(SISO)系统。