# 六自由度平台液压驱动轨迹规划
六自由度平台通过六条电/液压作动器实现 X/Y/Z 平移与滚转/俯仰/偏航姿态控制,具备高精度动态模拟、运动再现、振动试验、虚拟样机验证、驾驶/飞行仿真与硬件在环测试等功能。
# 原理概述
六自由度平台涉及到以下相关原理:
- 机构学:上平台与下基座由 6 条可伸缩作动器(通常成对万向/球铰)连接,构成并联机构,刚度高、误差不易累积。
- 运动学:逆运动学将期望位姿(X/Y/Z+滚转/俯仰/偏航)映射为六杆长度;正运动学基于六杆长度解平台姿态(数值求解为主)。
- 作动与测量:电动丝杠或液压缸驱动,配合编码器/直线位移传感器闭环控制;力/压传感器用于力位混合控制与安全监测。
- 控制:前馈+PID/模型预测控制,含坐标变换、速度/加速度限制、奇异位形与行程约束管理、倾翻与碰撞保护。
- 动力学:并联架构使等效质量低、带宽高;需处理摩擦、间隙与柔性,常通过观测器/补偿提高跟踪与振动抑制。
- 标定与几何辨识:利用激光跟踪仪/摄影测量标定铰点与杆长零位,修正制造装配误差以保证姿态精度。
本次案例分析中,主要是对系统初步设计阶段的仿真分析,模拟六自由度平台的机械、液压、控制系统,不涉及详细传感器系统和机械结构运动偏差补偿内容。
# 六自由度平台液压驱动轨迹规划
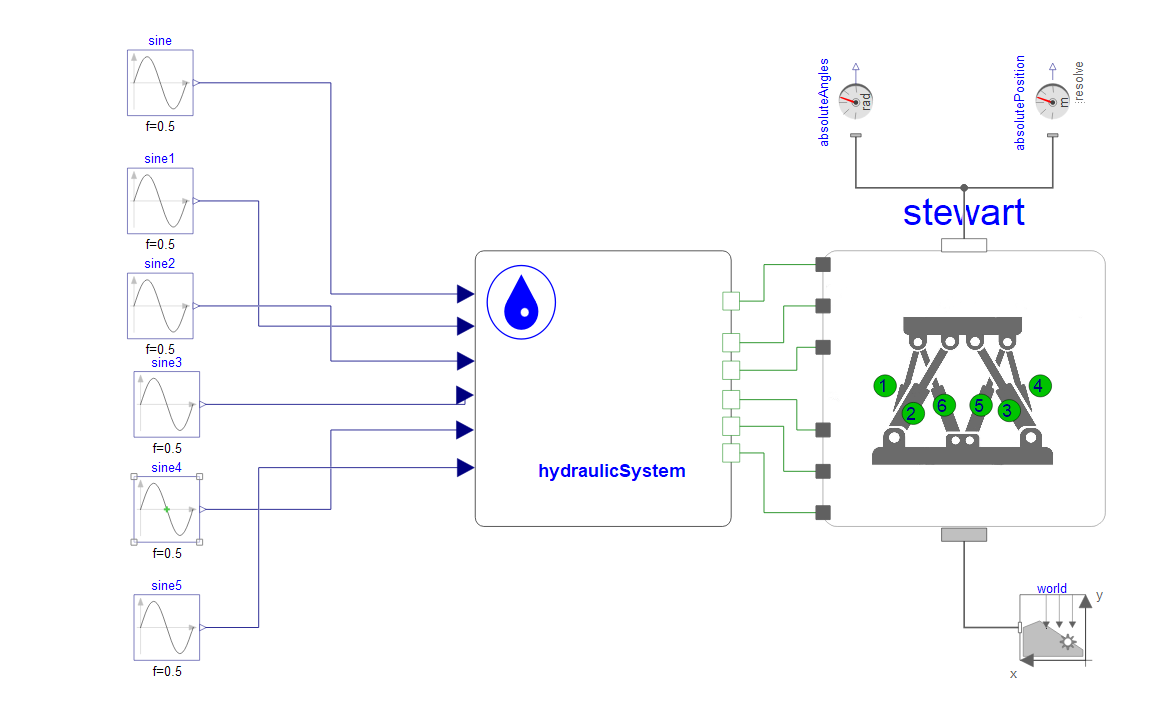
完整的 Modelica 模型如下图所示:
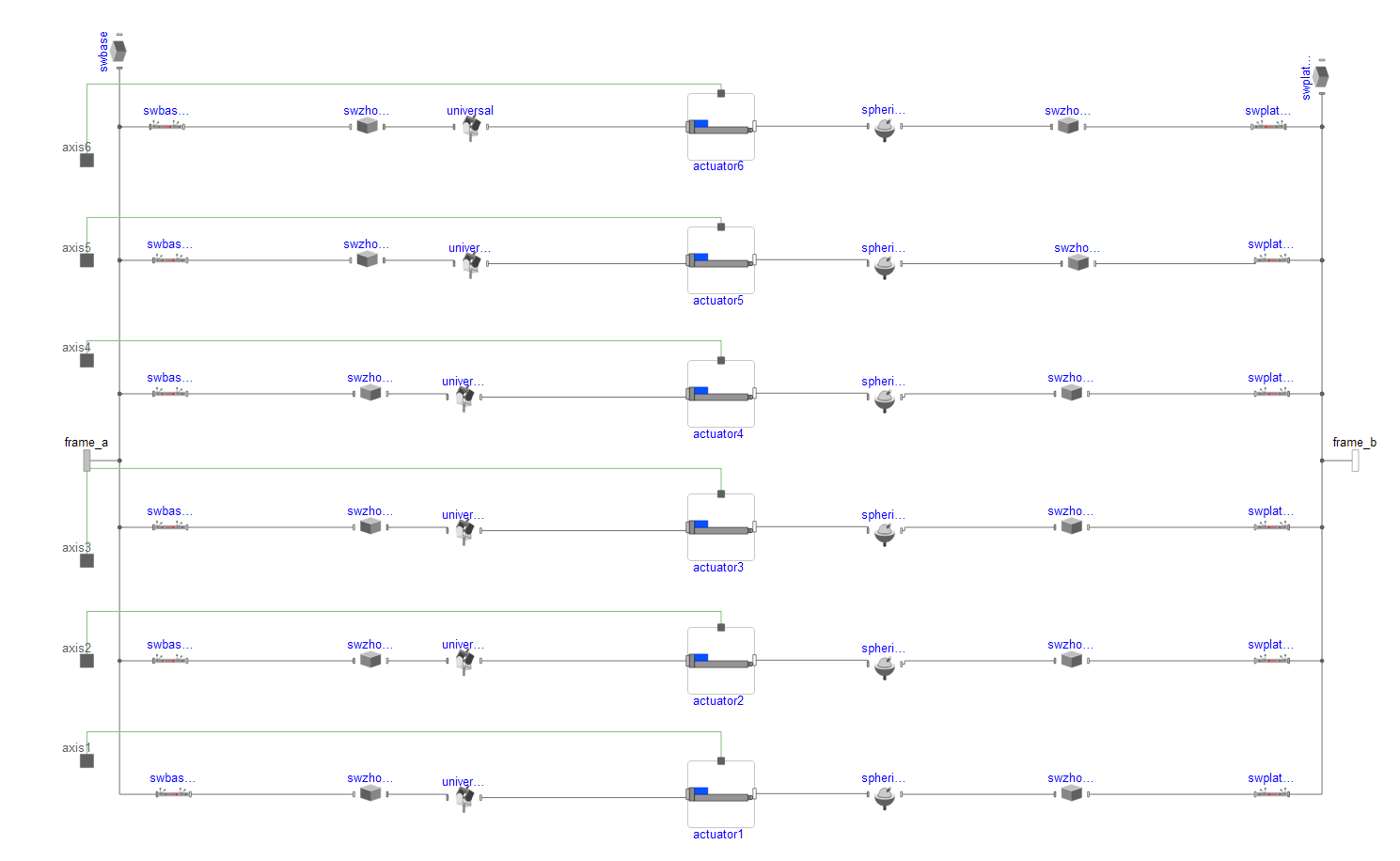
机械子系统结构如下图所示:
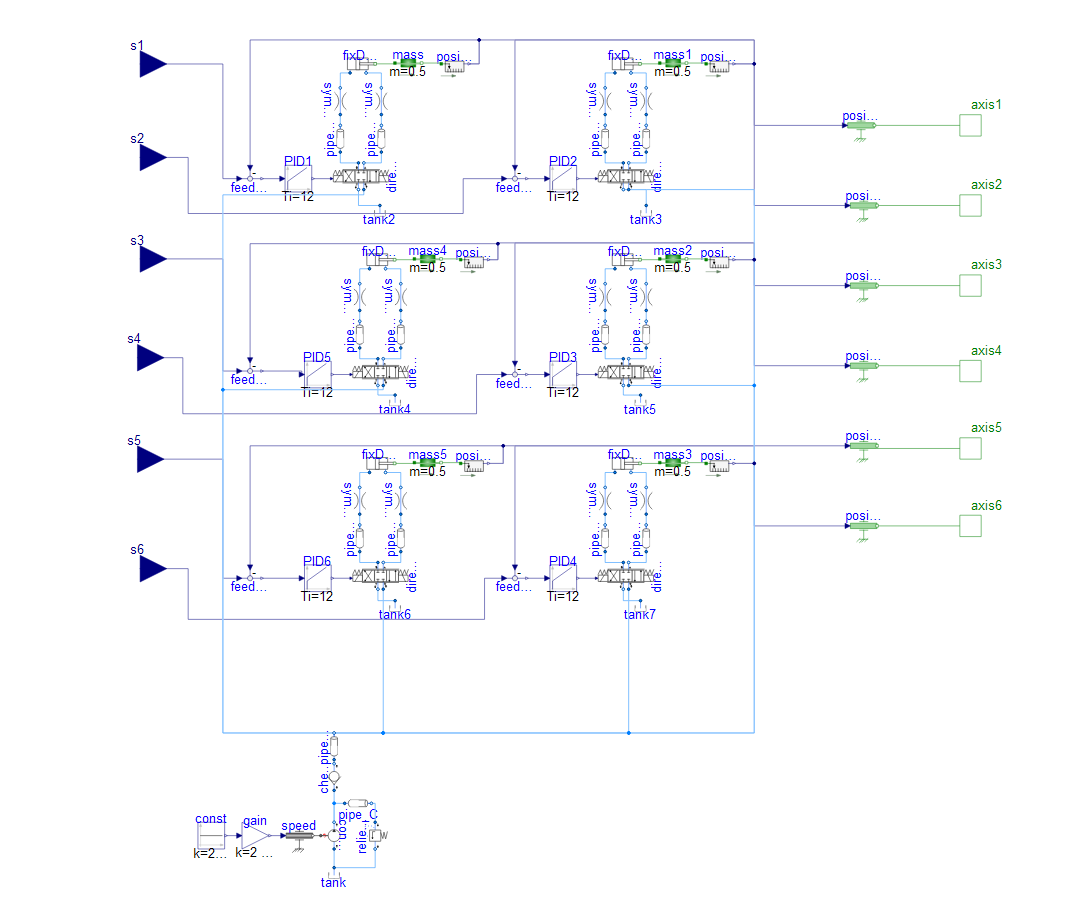
液压子系统结构如下图所示:
模型结构中所有组件来自于以下模型库:
| 模型库名称 | 描述 |
|---|---|
| Modelica 标准库 | 提供基础 Modelica 模型和函数 |
| TYMultibody 多体系统模型库 | 用于多体动力学建模 |
| TYHydraulics 液压模型库 | 提供液压系统建模所需的组件 |
| TYOilMedia 液压介质模型库 | 提供液压油等介质的模型 |
| TYMechanics 基础机械模型库 | 用于一维基础机械元件建模 |
# 仿真结果分析
选择模型 Stewart_RandomDrive,单击仿真,待仿真结束后,正弦信号输入,直接驱动六液压缸运动后,六自由度平台的仿真结果如下图所示。
选择模型 Stewart_Trajectory,单击仿真,待仿真结束后,给定目标信号输入,通过运动学反解,计算驱动六液压缸运动后,六自由度平台的仿真结果如下图所示。
通过仿真结果可以看出,六自由度平台可以实现在指定场景下单六自由度稳定和平衡控制。