# 机械臂刚柔耦合建模
机械臂在汽车制造、电子组装等工业场景中需完成高精度作业(如焊接、抓取),以及在高速运动中保持末端执行器稳定性,传统刚性模型无法准确模拟柔性部件的动态变形,需要引入柔性体模型,以描述机械臂的刚柔耦合运动。
# 原理概述
该模型采用多体系统模型库、柔性体模型库对机械臂进行刚柔耦合分析,验证大空间刚柔耦合机器人(如航天作业臂)模型,预测机械臂在高速运动中的振动和形变,提升轨迹规划精度。
# 机械臂刚柔耦合建模
完整的 Modelica 模型如下图所示:
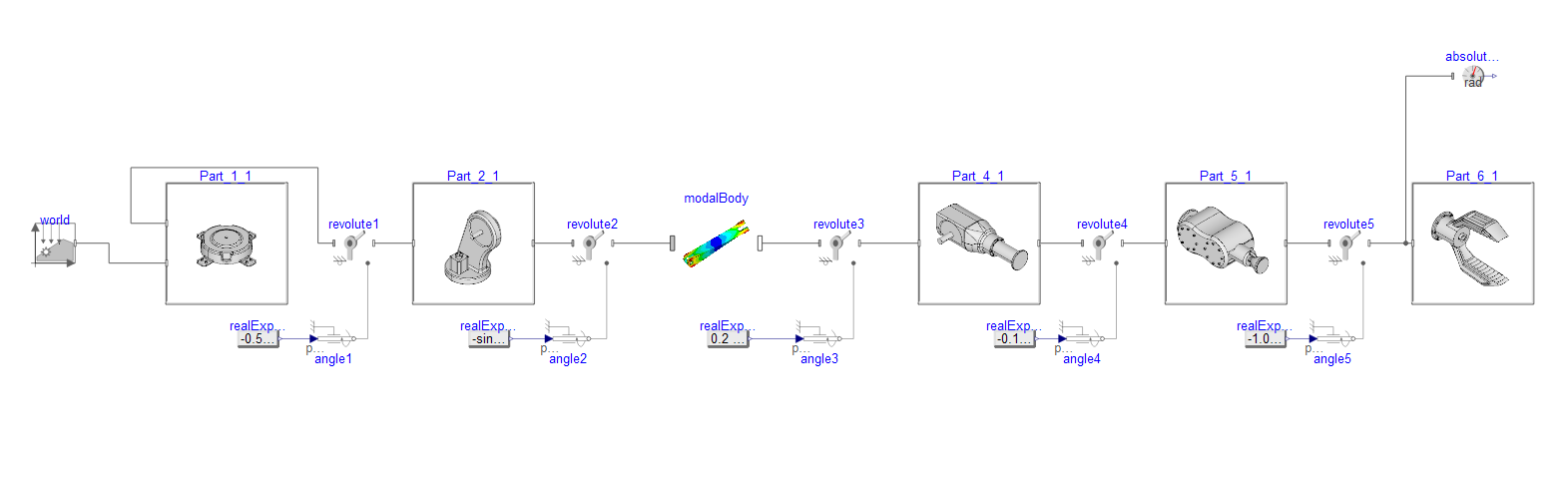
模型结构中所有组件来自于以下模型库:
| 模型库名称 | 描述 |
|---|---|
| Modelica 标准库 | 提供基础 Modelica 模型和函数 |
| TYMultibody 多体系统模型库 | 用于多体动力学建模 |
| TYMechanics 基础机械模型库 | 用于一维基础机械元件建模 |
| TYFlexBody 柔性体模型库 | 用于小变形柔性体建模 |
# 仿真结果分析
选择模型,单击仿真,待仿真结束后,仿真结果和机器臂运动结果如下图所示。
- 柔性体变形结果
- 机械臂运行轨迹
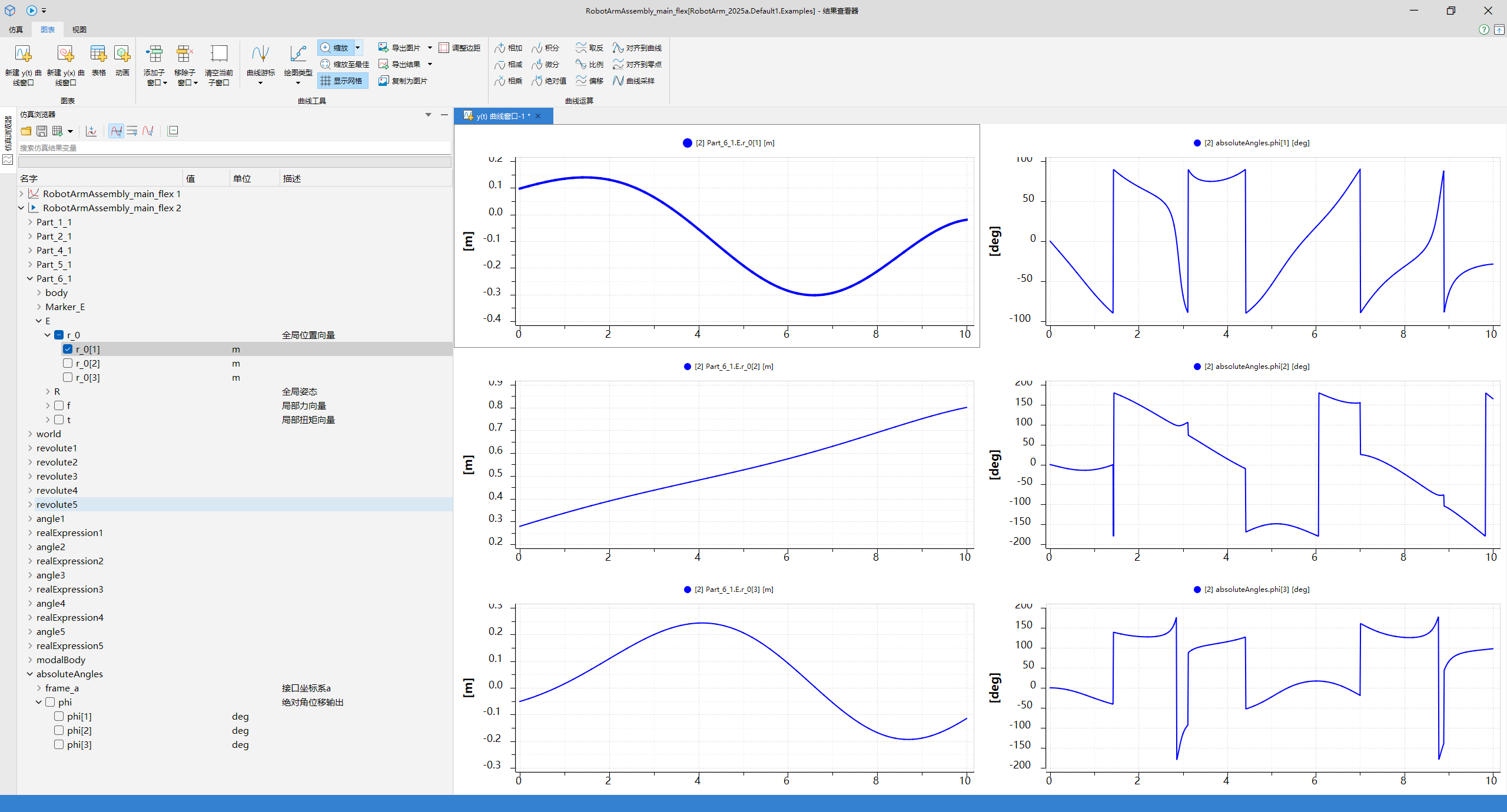
通过仿真结果可以看出,刚柔耦合机械臂模型可以更详细的分析机械臂的变形,更准确的模拟机械臂的动态工况。