# 煤矿辅助作业机器人运动控制系统
本文介绍搭载重载液压臂的煤矿巷道场景管道安装机器人的运动学模型,该系统是煤矿智能化的重要研究方向与核心设备。
# 原理概述
管道安装、重物搬运、巷道喷浆等辅助作业机器人工作频次高、作业负重大,安全工作极度依赖良好的液压控制与运动控制方法,本项目利用 MWORKS 软件构建抓管机器人重载液压机械臂的运动学模型,分析其在目标场景下的动力学与运动学特性。
# 煤矿辅助作业机器人运动控制系统
打开模型前,需要加载依赖模型
。 完整的 Modelica 模型如下图所示: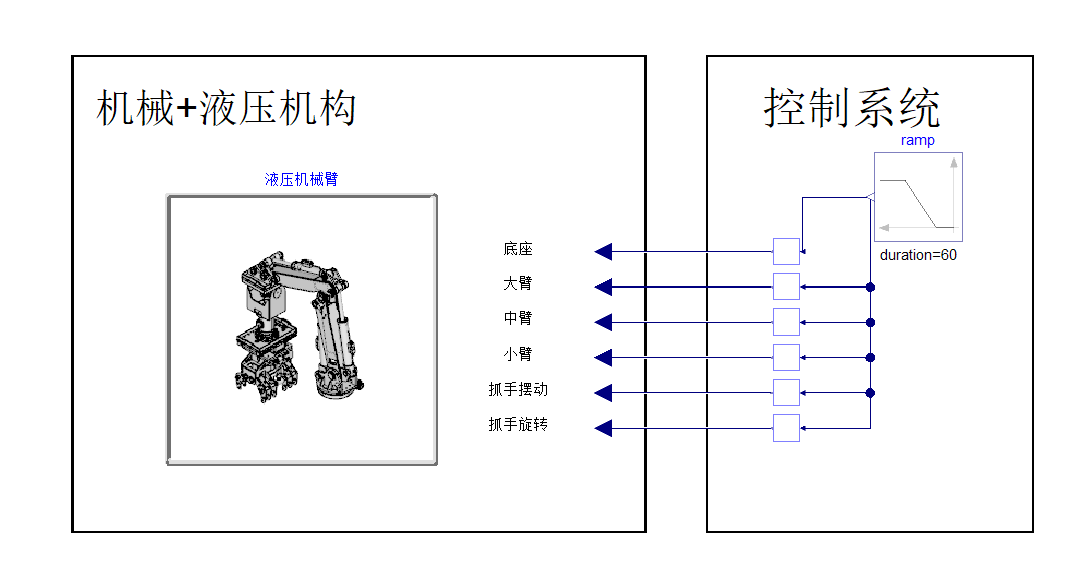
模型结构中所有组件来自于以下模型库:
| 模型库名称 | 描述 |
|---|---|
| Modelica 标准库 | 提供基础 Modelica 模型和函数 |
| TYMultibody 多体模型库 | 用于多体动力学建模 |
| TYHydraulics 液压模型库 | 提供液压系统建模所需的组件 |
| TYOilMedia 液压介质模型库 | 提供液压油等介质的模型 |
煤矿辅助作业机器人由底座、大臂、中臂、小臂组成,小臂又包括抓手摆臂、抓手自转臂和末端组成,使用 CAD 工具箱导入外部模型,与模型库中的模型组合使用,最终共同使用机械机构进行运动学分析。
# 仿真结果分析
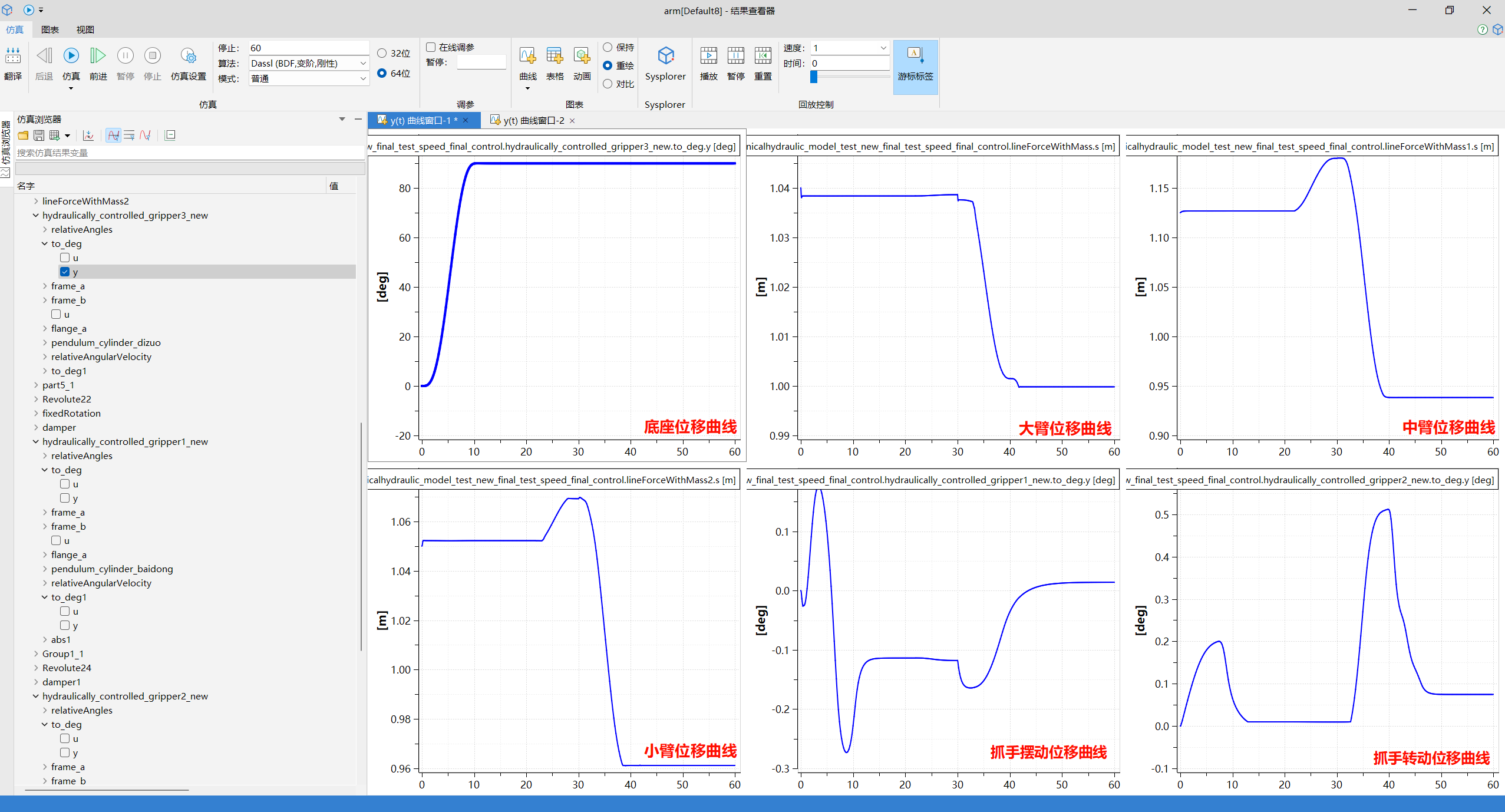
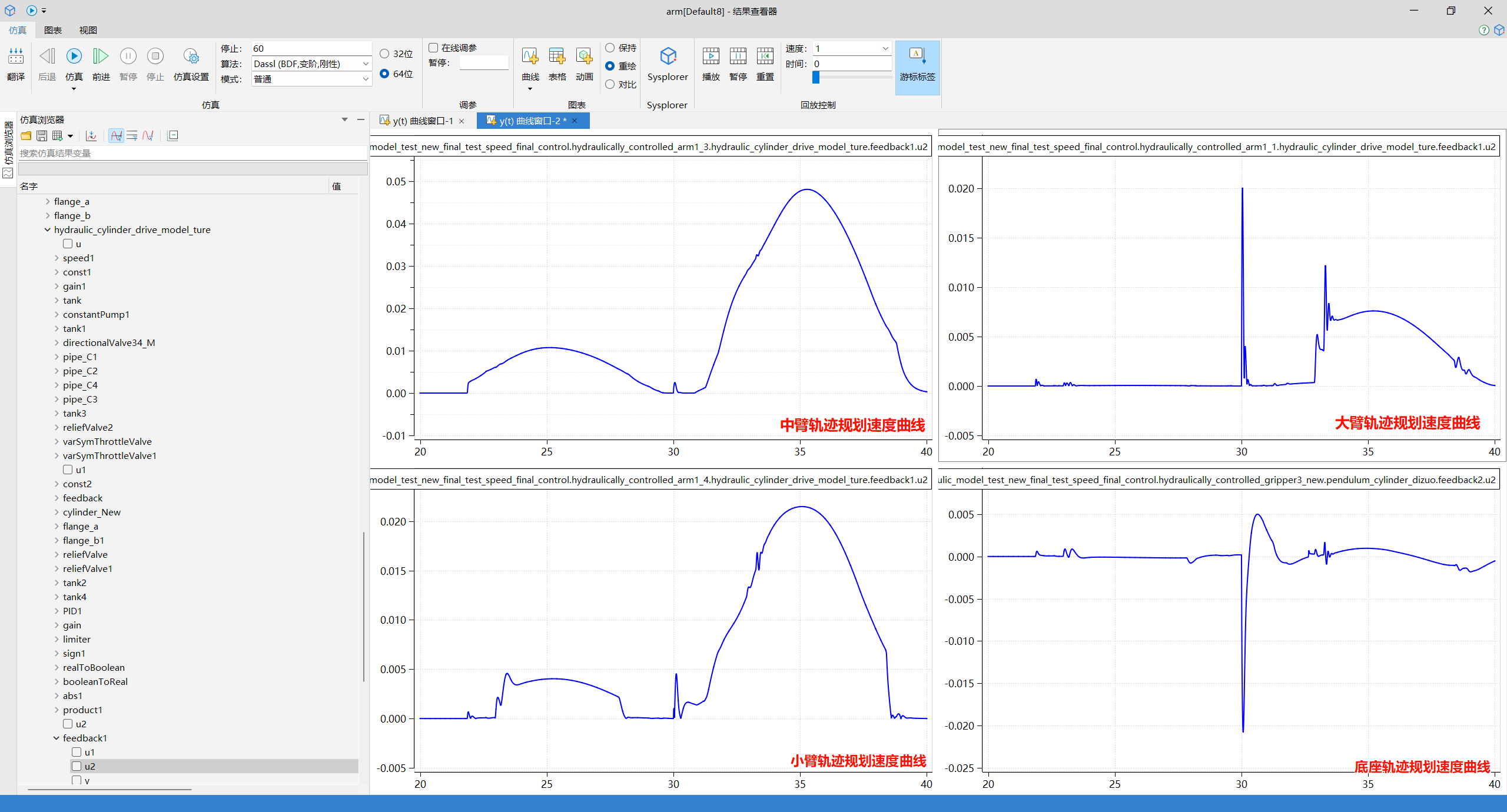
- 单击仿真,待仿真结束后,结果如下图所示:两个仿真结果图分别显示了机械臂关节位移曲线和关节速度曲线,让机械臂按煤矿巷道的指定工况,按指定工况运行,完成物体拿取动作。
机械臂关节曲线:
机械臂速度曲线:
在 Sysplorer 仿真界面,选择仿真>图表>动画,绘制起竖装置的三维动画,单击回放控制>播放按钮,实现动画播放。
# 案例来源
基于中煤科工机器人科技有限公司的企业应用验证项目《基于 MWORKS 的煤矿辅助作业机器人运动控制及其关键零部件寿命估计仿真项目》。