# 船舶舵机系统
本文进行舵机液压系统的原理分析和建模,模拟船舶自主航行过程中的舵机液压系统的仿真控制。
# 原理概述
船舶舵机系统是控制船舶航向的核心装置,其工作原理基于将驾驶员的操舵指令转化为液压执行机构的控制信号,通过液压机构驱动舵叶进行机械转动,从而改变水流方向并产生转向力。
# 船舶舵机系统
完整的 Modelica 模型如下图所示:
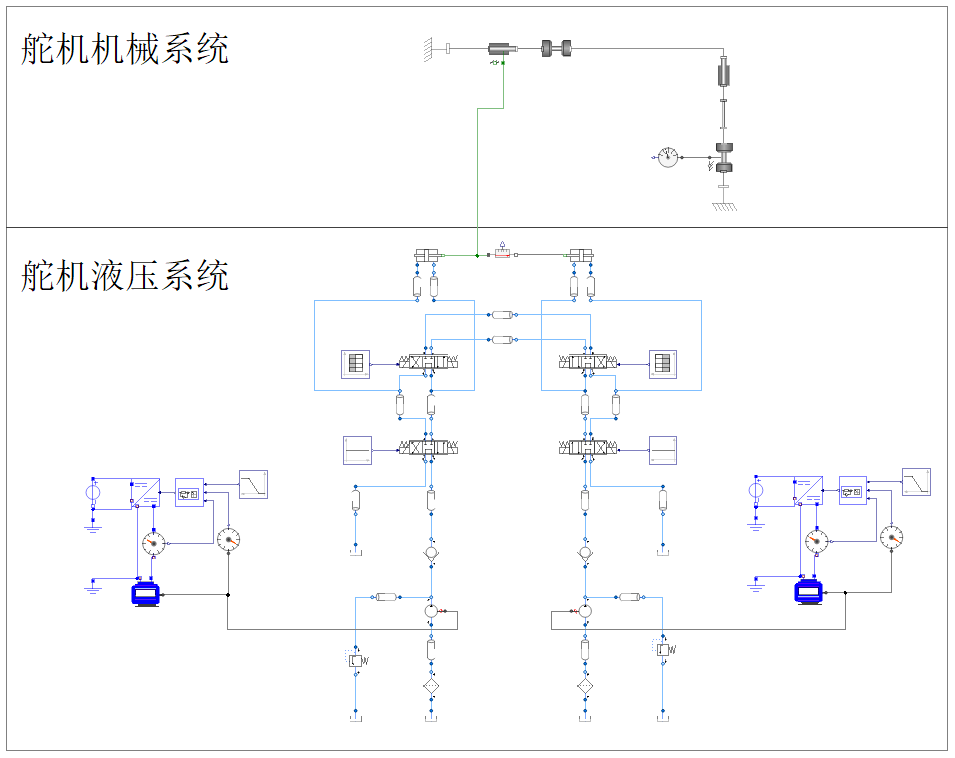
模型结构中所有组件来自于以下模型库:
| 模型库名称 | 描述 |
|---|---|
| Modelica 标准库 | 提供基础 Modelica 模型和函数 |
| TYHydraulics 液压模型库 | 提供液压系统建模所需的组件 |
| TYOilMedia 液压介质模型库 | 提供液压油等介质的模型 |
| TYMechanics2D 平面机械模型库 | 提供二维平面机械模型 |
| TYMechanics 基础机械模型库 | 提供一维基础机械模型 |
| TYMotor 电机模型库 | 提供常见的电机模型 |
舵机系统通过三位四通阀的控制电流进行方向控制,其中阀的额定控制电流可以设置 -40,0 和 40,对应三位四通换向阀的接口在不同的点位;40 代表三位四通换向阀的接口在交叉接口的点位。此次仿真以拨叉式舵机为例,左右两侧分别设置为 -40 和 40,实现模拟舵机从指定角度回正到零位的运行。
# 仿真结果分析
单击仿真后,结果如下图所示:
从仿真结果可以看出,船舶舵机在初始时间的转角为 -19.3°,经过 10 s 时间,控制信号控制液压换向阀,驱动液压缸进行运动,带动舵机回正到初始零位的位置。
# 案例来源
基于震兑工业智能科技有限公司的企业应用验证项目《基于 MWORKS 面向远程控制的船舶自主航行系统设计与测试项目》。