机械专业模型库
提示
单击打开示例后,可能会出现图形视图显示异常的情况,原因是未加载对应的模型库。此时单击主页工具栏检查按钮,会自动加载对应的模型库,通过检查后模型会正常展示。
多体系统模型库
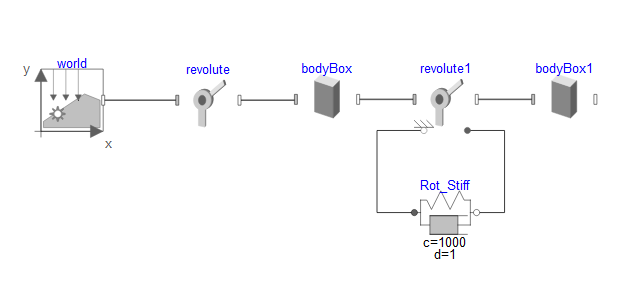
双摆
双摆模型是一种经典的物理模型,用于描述两个相互连接的摆的运动行为。该模型是一个简化系统,由摆臂、关节、重力组成,其中两个摆臂通过一个固定的轴连接在一起,可以自由摆动在机械工程中,可以用来设计和分析双摆钟、摇摆门以及机械振荡器等设备;在控制过程中,双摆模型可以用来研究和设计控制系统,以实现双摆系统的稳定控制和轨迹跟踪。
打开示例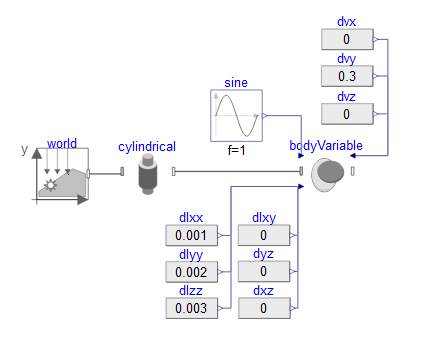
变质量刚体系统
变质量刚体系统是指系统中的质量不是固定的,而是伴随系统的运动而发生改变。这种系统通常用于描述推进机制的航天器或者飞行器等动力学系统。在变质量系统中,系统的质量可能会因为喷射推进剂、释放物质或者其他因素而变化,从而导致推进过程中的动量、惯性等发生变化。
打开示例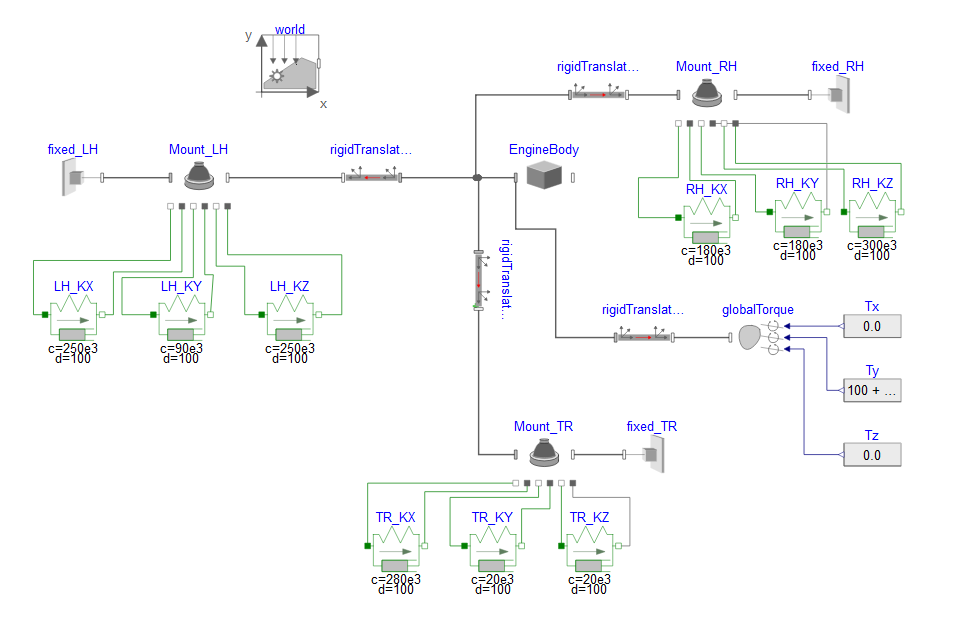
发动机悬置
发动机悬置系统是指将发动机安装在车辆或飞行器中的一种工程设计,通常是使用橡胶悬置、液力悬置和主动悬置等,将发动机与车辆或者飞行器的车架、机身连接起来,以便提高车辆稳定性、减少振动和噪音等。该系统的关键参数有刚度、阻尼、固有频率等,通过弹性元件吸收振动能量,从而减少振动传递到车架或机身的能量。
打开示例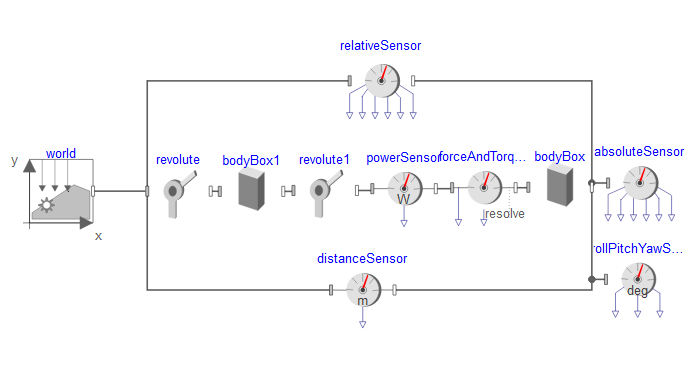
使用传感器
该案例以双摆模型为例,旨在帮助用户使用多体系统中几个常用的传感器模型,比如绝对传感器、相对传感器,包括绝对/相对位置测量、绝对/相对角位移测量等。传感器广泛应用在机器人、自动化、机械控制等领域,用于测量和监控多体运动系统中各种物理参数。
打开示例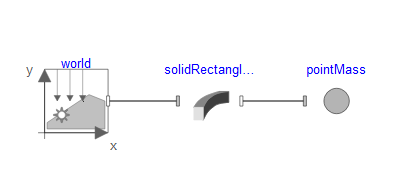
悬挂质量的悬臂梁
悬臂梁是一个工程和材料力学常用的结构,它通常由一个固定的支点支撑在一端,另一端悬空或者悬挂物体。在悬臂梁的悬端位置施加质量时,悬臂梁会发生弯曲变形。
打开示例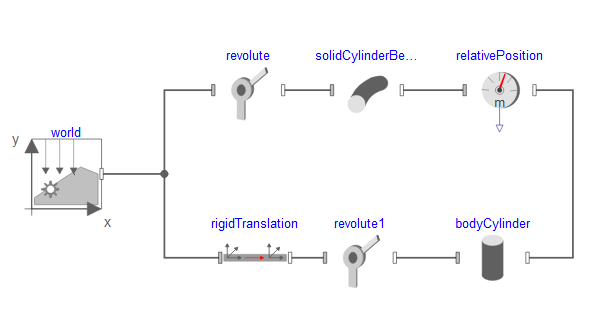
柔性梁的单摆对比
柔性梁的摆动变形是一种综合了弯曲、拉伸以及摆动特性的复杂运动。在重力的作用下,柔性梁的自由端会发生弯曲变形,当柔性梁开始下摆,受到重力的梁会产生拉伸变形。可以通过与刚体单摆模型对比,使用相对位移传感器能够测量柔性梁的端部变形。
打开示例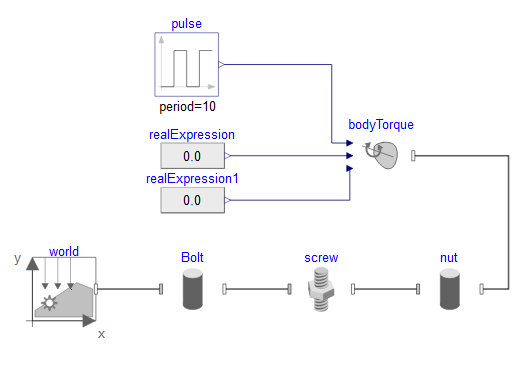
螺母螺旋运动
螺母(Nut)通过转动,可以沿着螺栓(Bolt)的轴向方向移动,从而实现螺栓的固定和松开。螺旋运动同时包括旋转和平移两种运动,物体沿着螺旋线向前推进的同时能够发生绕轴旋转。螺母螺旋运动应用在螺纹连接、螺旋输送机构、螺栓升降机构等场景中。
打开示例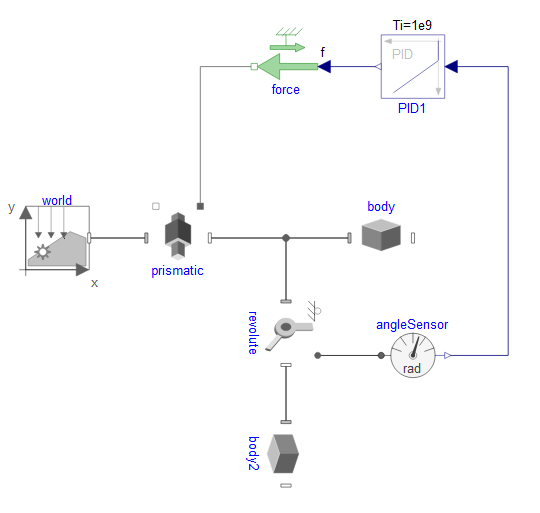
倒立摆
倒立摆系统是一种经典的控制系统问题,通过 PID 控制方法,调整比例、积分和微分系数来控制小车的运动保持摆杆直立状态。它广泛应用于两轮自平衡机器人、火箭发射阶段的姿态控制以及自动运输小车的稳定控制等。
打开示例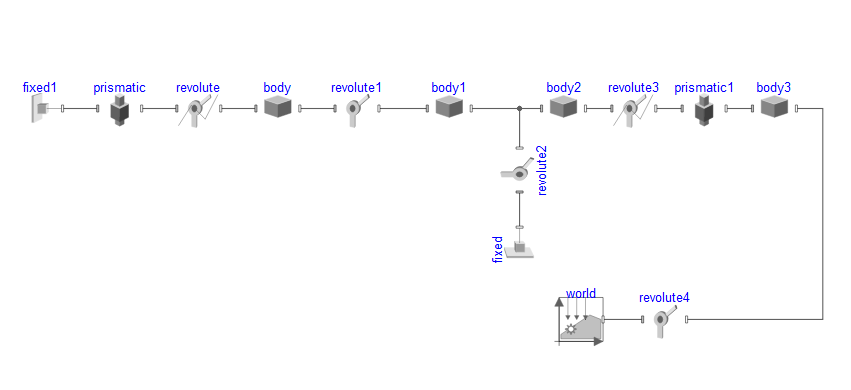
四杆曲柄滑块结构
四杆曲柄滑块结构是一种重要的机械闭环结构,常用于内燃机、柴油机、活塞泵等机械设备中。曲柄滑块结构由曲柄、连杆、滑块等部件组成,主要将旋转运动转换为往复直线运动或者反之,都具有广泛的工程应用。当曲柄旋转时,连杆会产生往复直线运动,这是由于曲柄的转动运动被连杆传递到连杆或者滑块上。
打开示例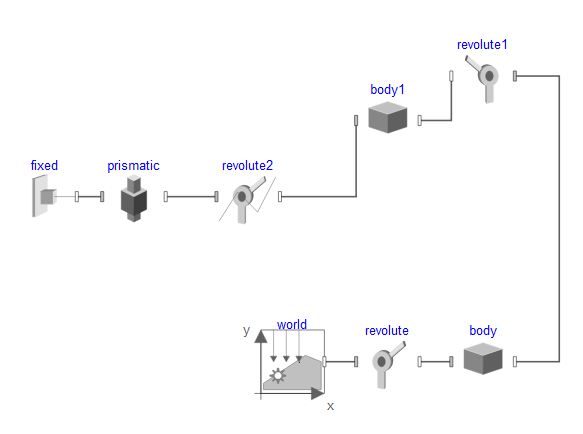
二杆曲柄滑块结构
二杆曲柄滑块结构是一种重要的机械闭环结构,常用于内燃机、柴油机、活塞泵等机械设备中。曲柄滑块结构由曲柄、连杆、滑块等部件组成,主要将旋转运动转换为往复直线运动或者反之,都具有广泛的工程应用。当曲柄旋转时,连杆会产生往复直线运动,这是由于曲柄的转动运动被连杆传递到滑块上。
打开示例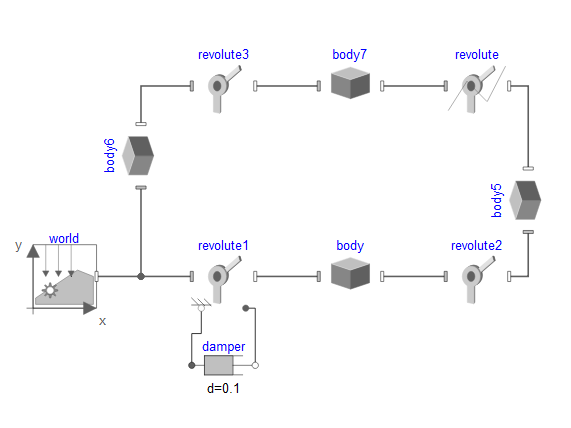
平面四连杆机构
平面四连杆(曲柄摇杆)结构是一种特殊的四连杆机构,其所有连杆和铰链均在同一个平面内运动,它由固定杆(机架)、曲柄、连杆、摇杆等部件组成,通过运动副将运动传递给其他连杆,都具有广泛的工程应用。
打开示例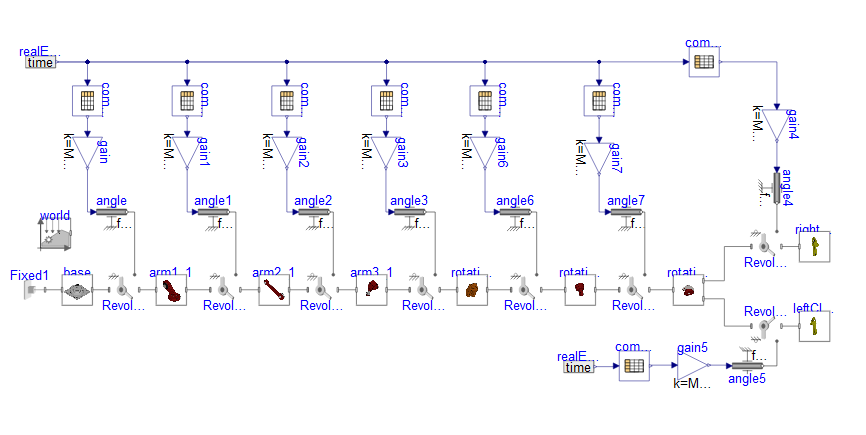
6 自由度机械臂作业系统
6 自由度机械臂由底座、多个连杆支臂、转动关节以及末端执行器组成,它是工业自动化和机械人技术中的核心设备。底座是机械臂的支撑部分,通常固定在工作台上;连杆支臂是连接底座和末端执行器的部分,通过 6 个关节的协同工作,使得机械臂能够达到空间中任意一点并进行任意姿态的定位,从而实现高度灵活的操作。
打开示例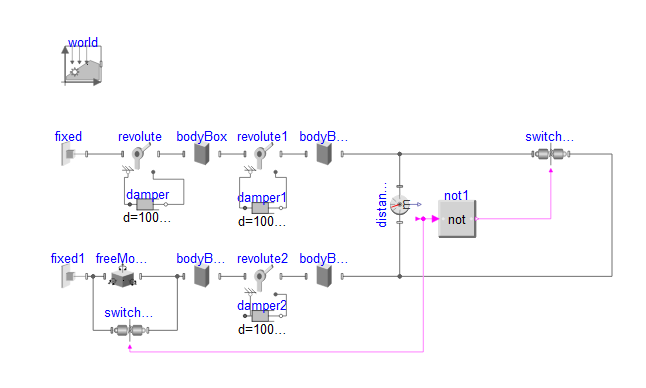
摆杆连接
该系统模拟一个两个独立的双摆运动,在末端靠近后紧密贴合一起,随之进行四杆随机摆动,旨在验证双摆系统的约束状态切换。
打开示例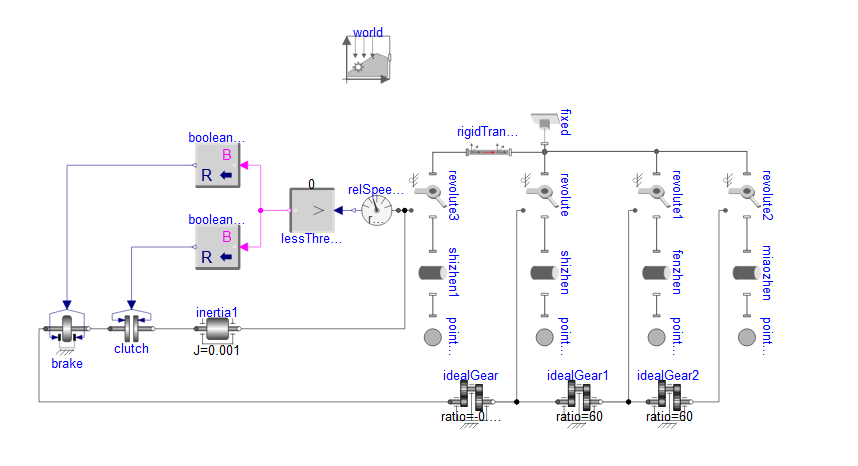
时钟机构
该系统模拟一个时钟机构,通过一个标准摆,计算时钟的摆动周期,再利用齿轮副传递扭矩,实现同步模拟。
打开示例
异相摆
该系统模拟一个异相摆系统,核心是多个单摆的振动相位纯在差值,反映了振动的“步调不一致”,即动能和势能的转化节奏不同步。可应用于简谐运动的经典实验模型、振动控制与减震以及声学和波的干涉研究等。
打开示例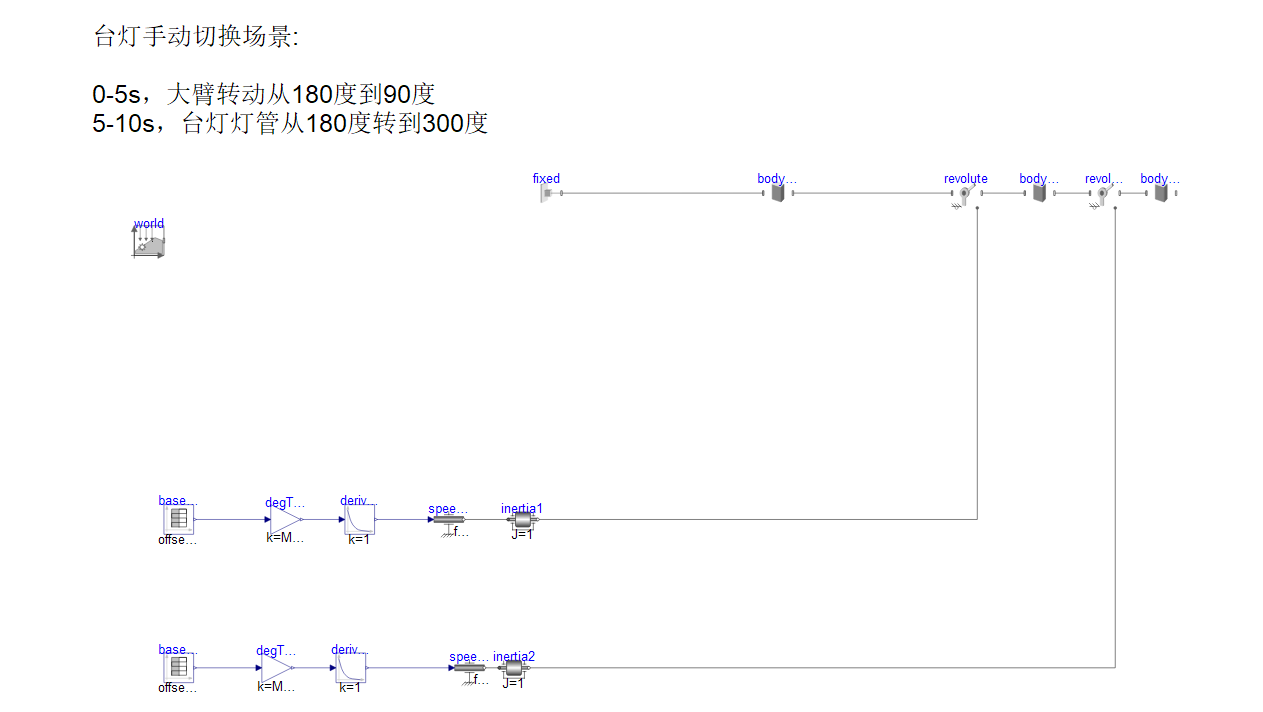
台灯角度手动切换模型
本模型展示一个家庭用台灯折叠展开过程的运行过程。
打开示例 基础机械模型库
一维平动模型
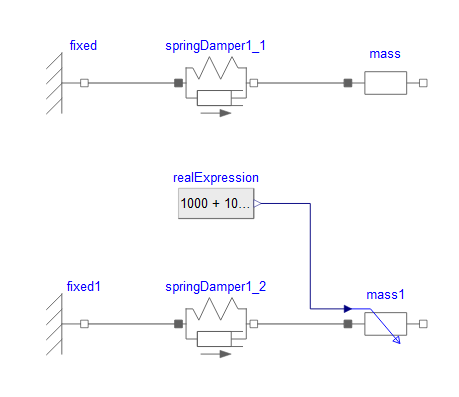
单自由度振荡器
该模型是一个单自由度振荡模型,可以分别模拟固定质量和变质量物体的振荡情况。
打开示例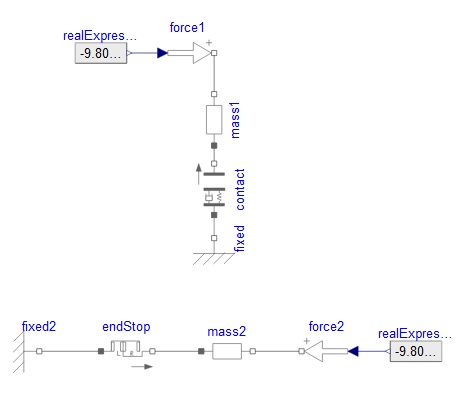
弹跳小球
该模型可以模拟小球自由落体或者水平状态下,对固定物体碰撞时的运动状态。
打开示例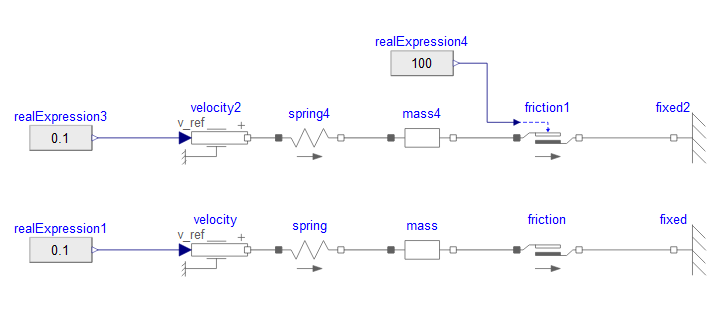
摩擦
该模型模拟质量与其他物体的水平摩擦的仿真状态,通过两组案例对比说明摩擦元件的使用方法。
打开示例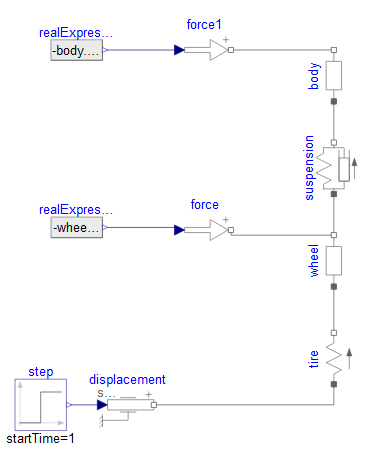
1/4 车辆悬架
该模型可以模拟车辆 1/4 悬架在经过指定路面时,车辆悬架的运动状态。
打开示例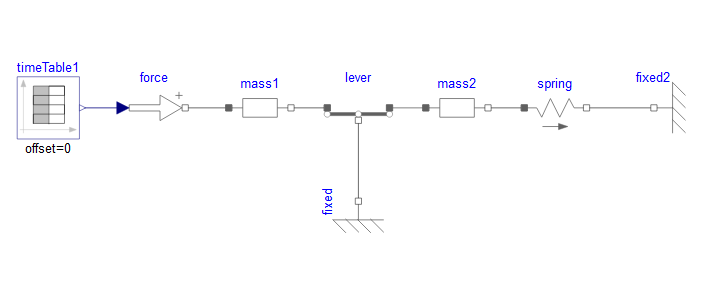
杠杆
该模型模拟杠杆中间固定,左端施加力,右端为弹簧时的运动状态,杠杆力的运动方向参考杠杆模型的说明。
打开示例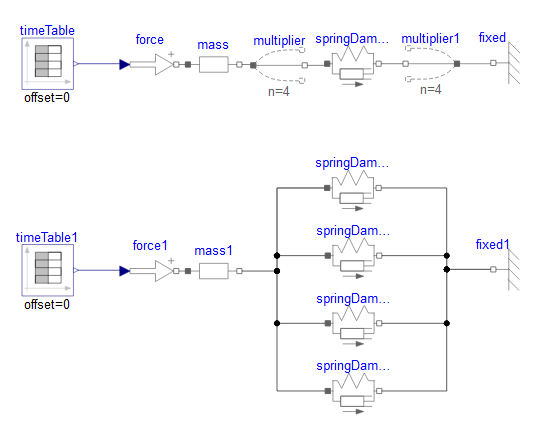
并列复制器
该模型介绍模型并列复制器的使用方法。
打开示例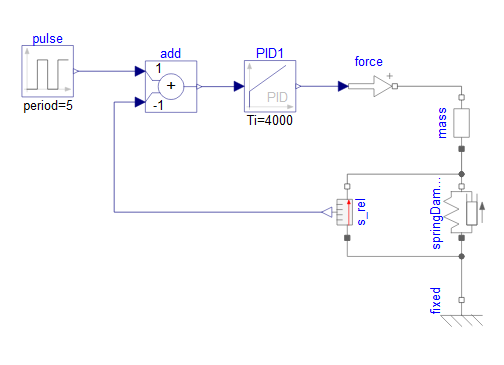
质量体的位移控制
该模型展示基础机械库模型和控制模型的联合使用,一维平动机械模型与控制系统进行集成,可以对一维平动运动进行控制。
打开示例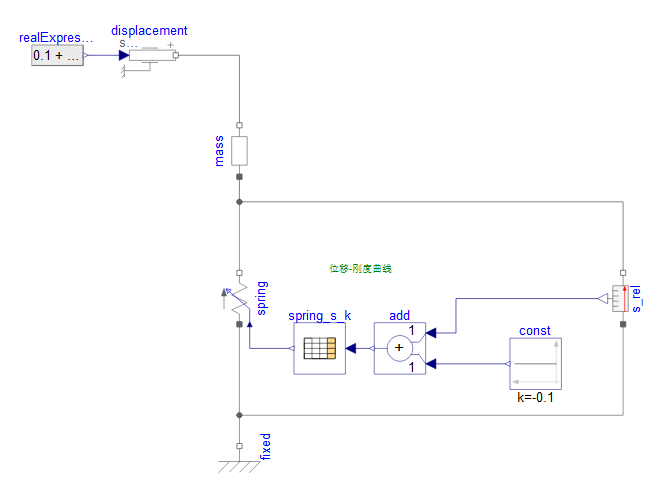
非线性弹簧
该模型可以模拟模拟非线性弹簧的控制和运动方式。
打开示例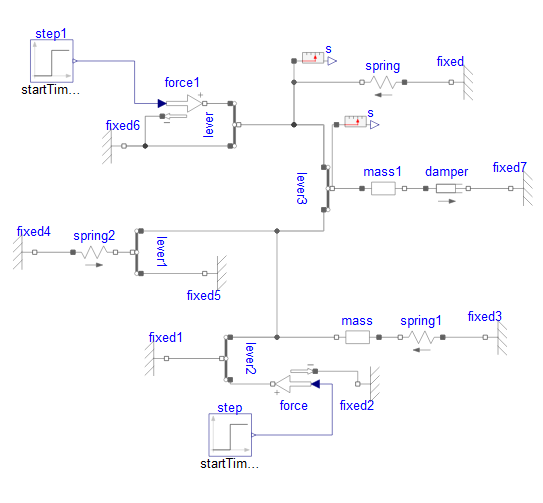
多连杆机构
该模型可以模拟模拟多连杆机构的运动状态。
打开示例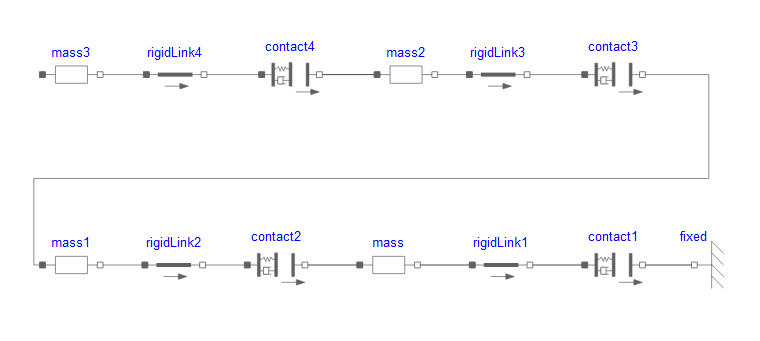
多物体水平碰撞
该模型是水平排列的,有一定相对距离的4个物体相互碰撞,模拟一维物体相互接触的碰撞运动。
打开示例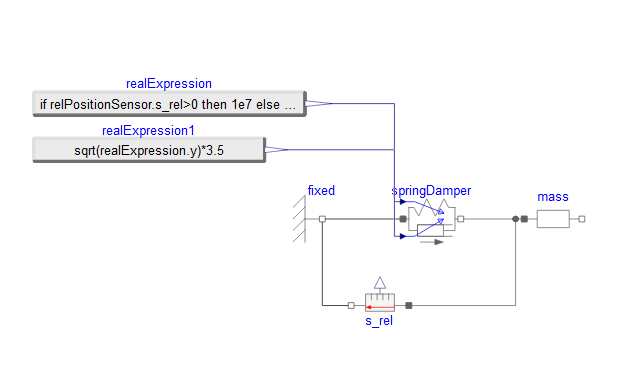
单质量振荡器2
该模型是一个单质量振荡器,主要通过非线性阻尼和条件公式模拟物体的振荡过程。
打开示例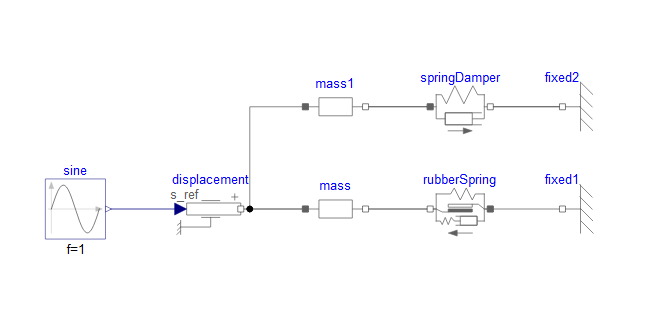
橡胶弹簧
该案例是非线性弹簧——橡胶弹簧的用法说明。
打开示例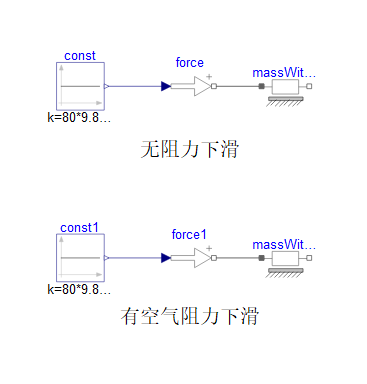
滑雪者
该案例是一维模型的扩展应用,通过边界上力的输入模拟滑雪者在固定坡度上的下滑。
打开示例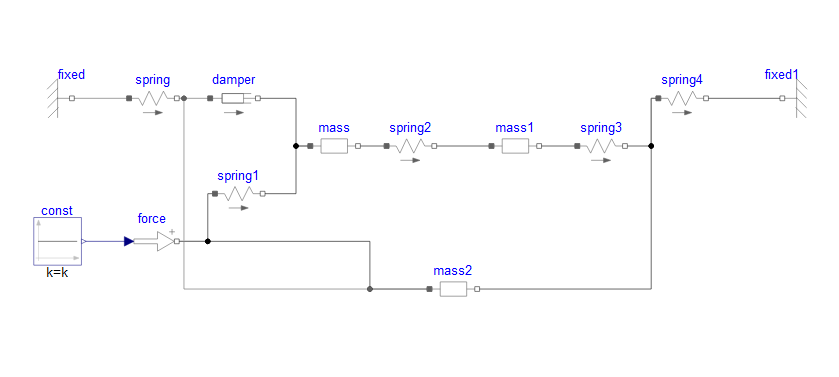
三自由度小车
该案例模拟了有外部干扰(如道路颠簸、速度突变)情况下,车辆内乘客的受力情况。
打开示例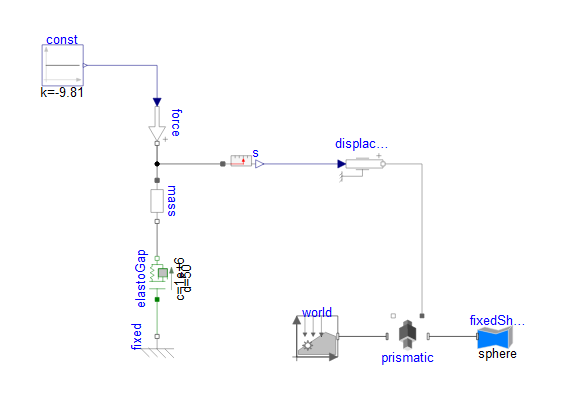
带动画的弹跳小球
本示例展示了如何使用一维平动机械模型库中的组件进行小球撞击地面的模拟,同时使用多体模型库中的组件对此过程进行可视化。
打开示例 一维转动模型
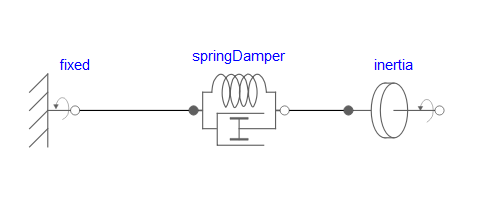
振荡器
该部件是一个简单的转动振荡器,器通过预设转动惯量的初始角位移和角速度,使弹簧阻尼处于预紧状态。
打开示例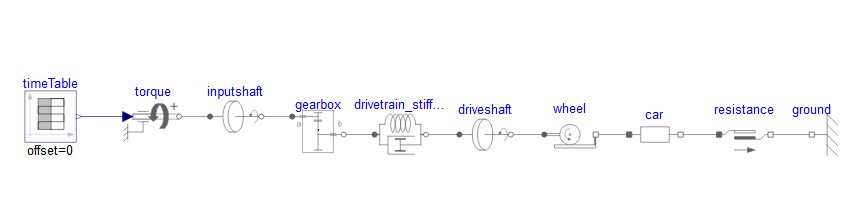
简单车辆
该案例是利用基础机械元件,对车辆的传动过程进行一个简单模拟。分析车辆的传动状态。
打开示例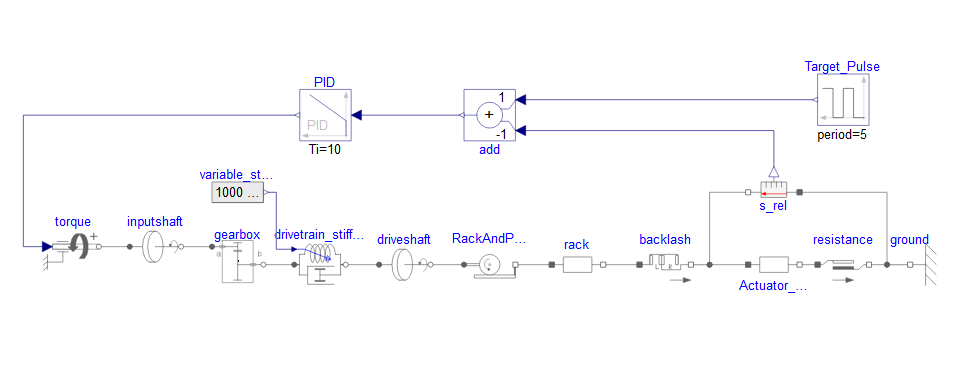
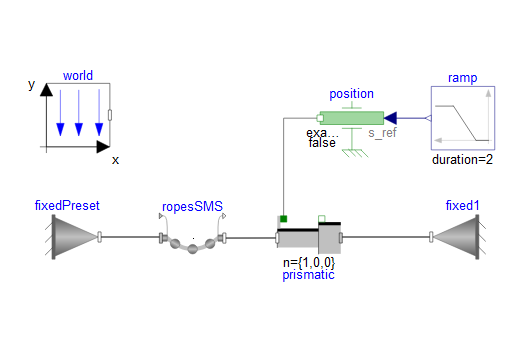
带控制的直线驱动机构
该案例可以模拟工程机械或机床设备中的直线驱动机构,通过 PID 控制执行输入力矩,控制导轨的直线位移。
打开示例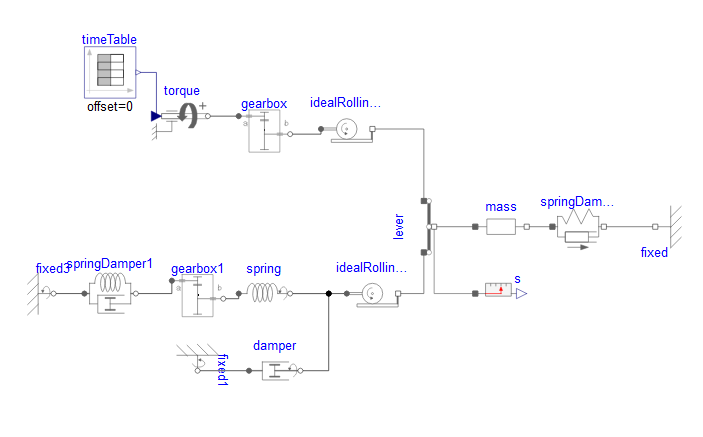
平移和转动运动
该案例是一个平移和转动机构的综合模型。
打开示例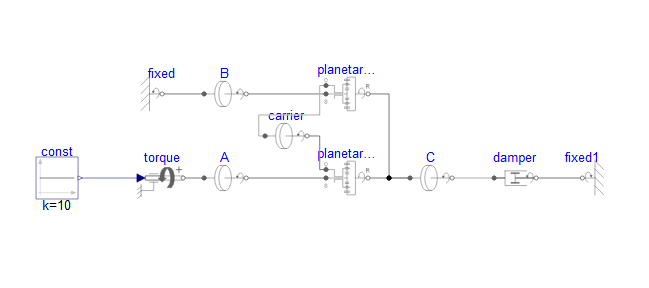
组合式行星轮
该模型是一个组合行星齿轮箱模型,该模型可以模拟齿轮箱内部的详细结构组成和物理参数,详细模拟行星架、齿圈、太阳轮的转动信息。
打开示例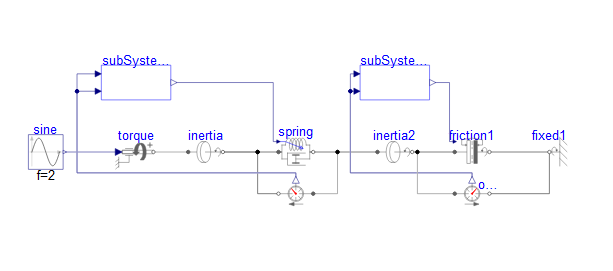
非线性弹簧阻尼
该模型是一个非线性耦合器的模拟,在转动系统中,分别用非线性弹簧阻尼和转动摩擦力模型,模拟非标准线性元件在刚度和摩擦力变化过程。
打开示例 传动系统模型库
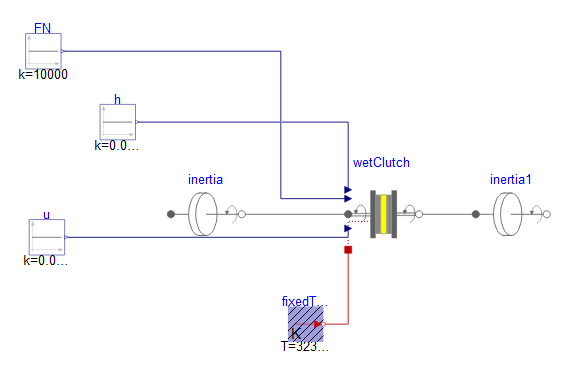
湿式离合器
模拟湿式离合器的运行特性,可以分析在离合器制动过程中,湿式离合器的干摩擦力特性和粘性摩擦力矩。
打开示例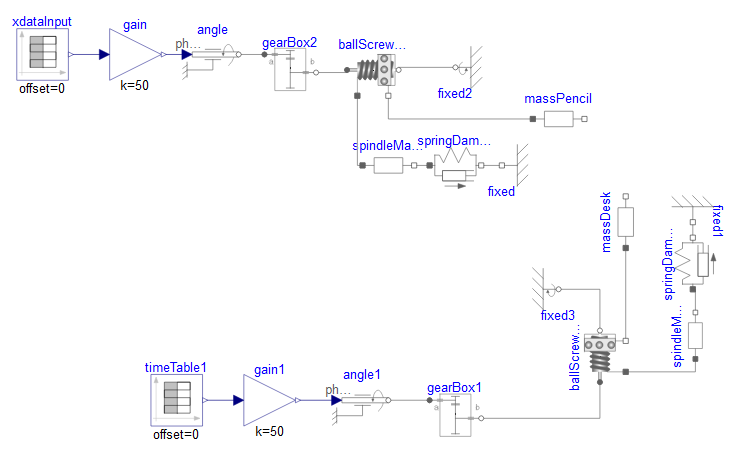
绘图机和滚珠丝杠驱动
模拟机械绘图机构的运行,通过分别设置 X、Y 方向的输入信号可以使机械机构按照固定的轨迹运动,得到目标图形。
打开示例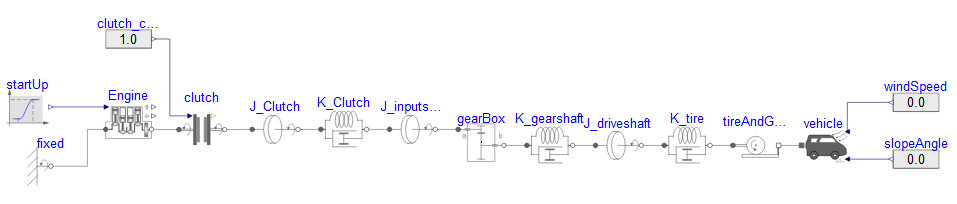
车辆起步分析
模拟简单汽车的起步工况的运行,发动机的初始启动转速为 800 rpm,通过左侧的 startUp 起步信号控制 0-15s 的发动机信号,模拟车辆起步过程,分析转轴和车辆的加速度振动情况。
打开示例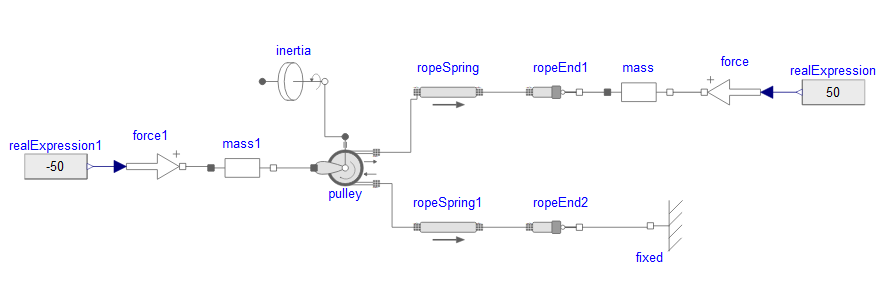
动滑轮传动
展示绳索和滑轮传动模型使用方式,模拟人利用动滑轮从 1 米的高度提升重物,物体初始位置在地面 0 米位置。
打开示例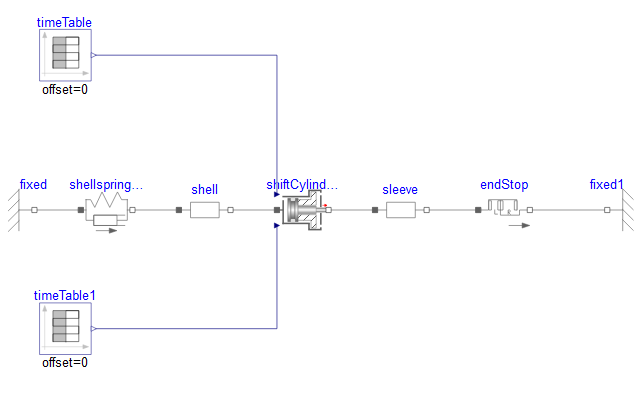
三位执行器应用示例
该用例是三位机械活塞的应用案例,可以应用于套筒元件相对运动的模拟。
打开示例
4 质量传动轴
该模型是模拟传动系统中传动轴系的运行状态,通过齿轮箱、弹簧阻尼、轴段和万向节分析传动轴中各部分的转动状态和振动状态。
打开示例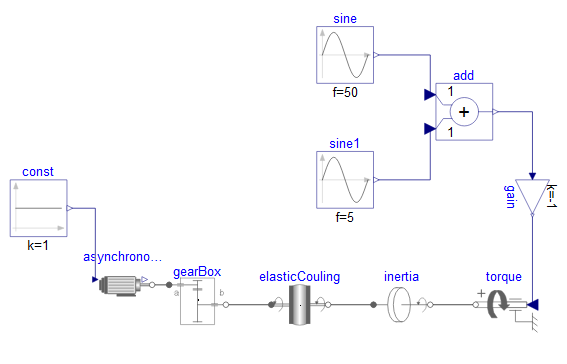
弹性联轴器
模拟弹性联轴器的运行方式,通过弹性联轴器可以过滤右侧负载中部分频率的扭矩。
打开示例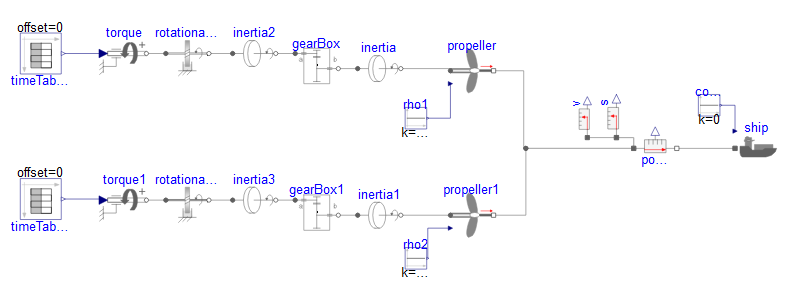
船舶电力驱动系统
船舶电力驱动系统是使用电动机作为动力装置,将电能转化为机械能,从而推动船舶前进的船舶动力系统。
打开示例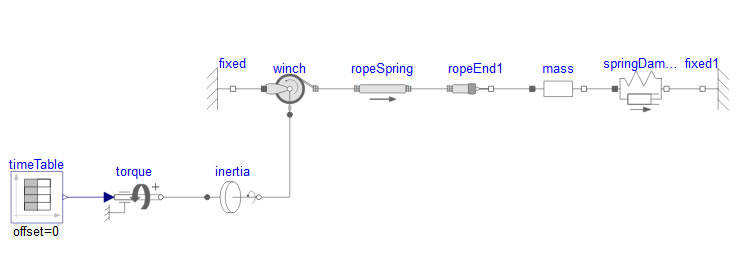
绞盘拉取物体
该模型介绍绳索包中绞盘的使用方法,模拟使用绞盘拉取一个被弹簧连接的物体的运动情况。
打开示例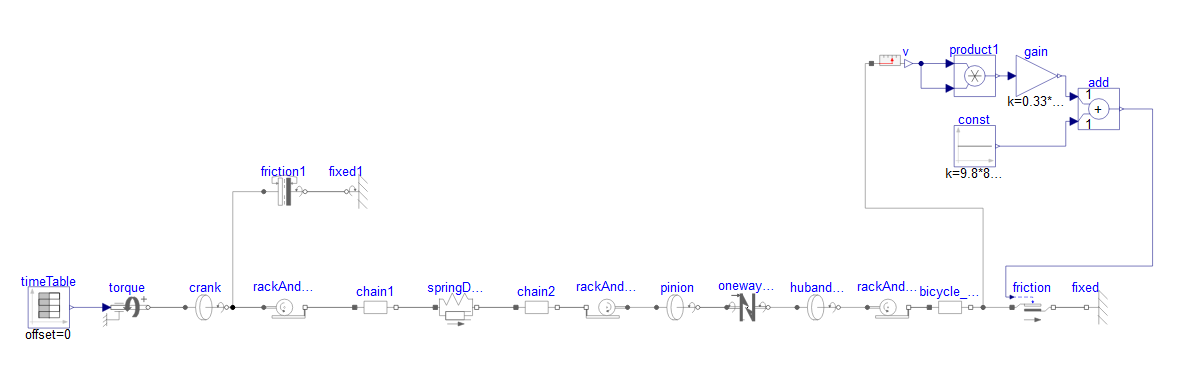
自行车传动系统
该案例模拟自行车的动力传动系统,可以模拟运行过程中,自行车在有动力提供过程中的加速状态和无动力提供时,车辆飞轮为自由工况,在地面摩擦力下缓慢减速的状态。
打开示例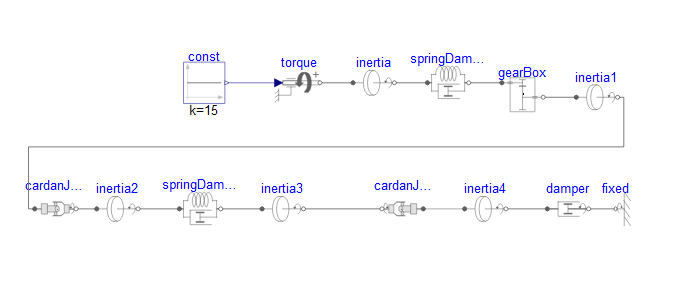
扭转系统中的万向轴
该案例模拟有万向轴的传动系统,该系统可用于传递扭转和旋转运动,同时允许传动轴之间存在角度偏移或者相对位移。
打开示例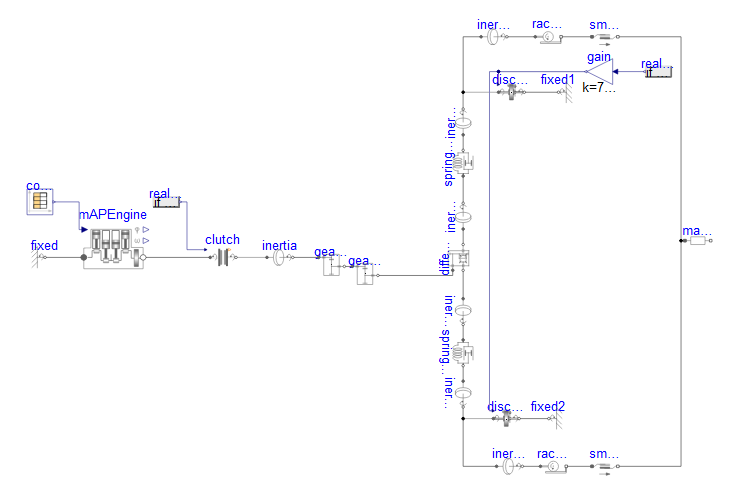
带刹车控制的前轮车辆驱动系统
该系统为车辆前轮驱动系统,可实现将发动机的动力传递至前轮,实现驱动、转动与部分制动功能。
打开示例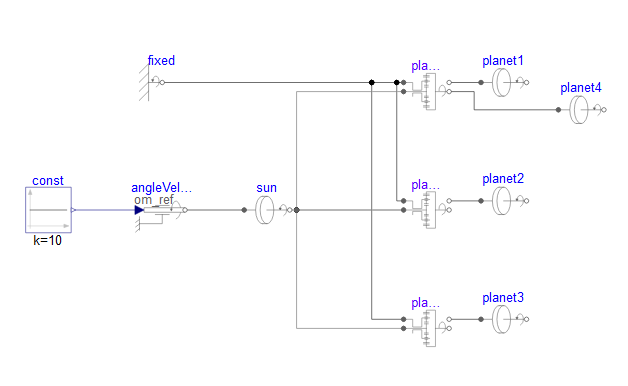
行星轮系
该案例模拟行星轮系的传动模型,通过行星齿轮箱和转动惯量组合使用,模拟一个有太阳轮、3个行星轮和一个齿圈的行星轮系。
打开示例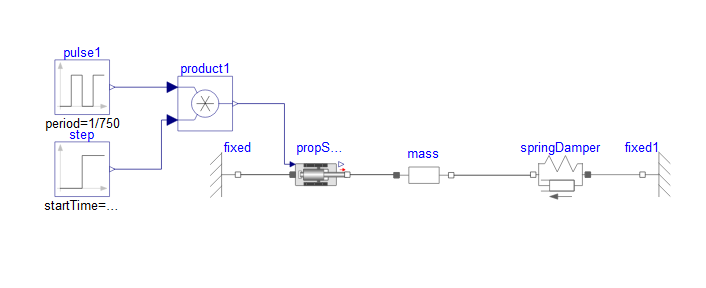
PWM 控制的比例电磁阀
该模型构成一个比例电磁阀(带铁芯的电磁线圈)。该电磁阀由脉宽调制(PWM)控制。
打开示例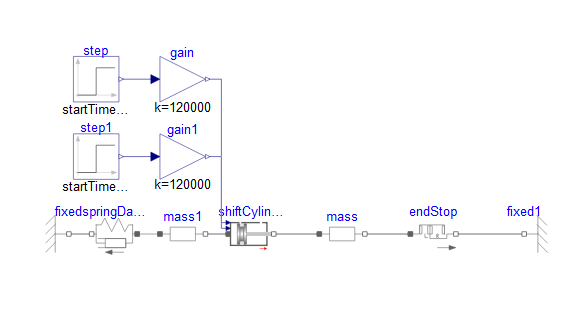
套筒上的换挡油缸控制
该模型展示了一个用于两个位置操作同步器滑动套筒的换挡缸(例如在自动手动变速器中)。
打开示例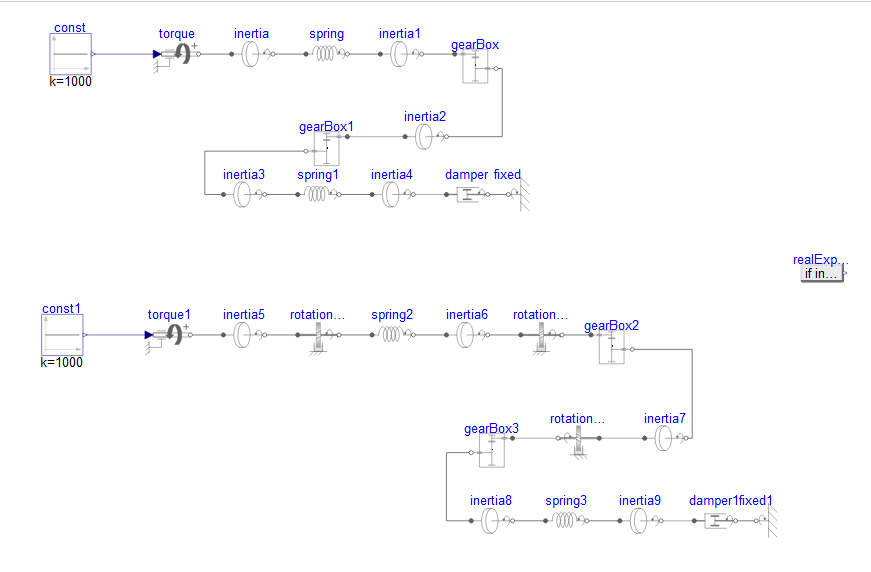
传动轴系效率分析
该案例通过提供一个理想无损失的传动轴系和有转动损失的轴系模型,说明转动损失组件的使用方法,进行轴系效率分析。
打开示例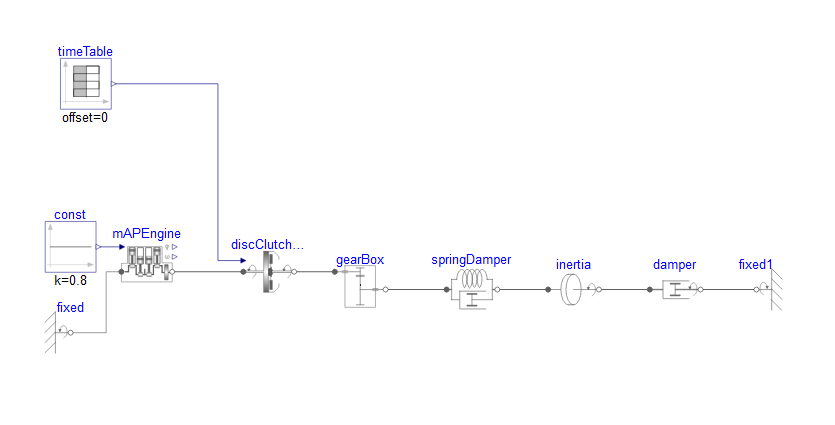
车辆动力系统中的双质量飞轮
本示例展示了如何使用一维转动机械模型库中的组件进行扭转的模拟。该模型将动力总成视为一个包含扭转阻尼器的扭转系统,其中在离合器盘与从动轴之间集成了扭转阻尼器。
打开示例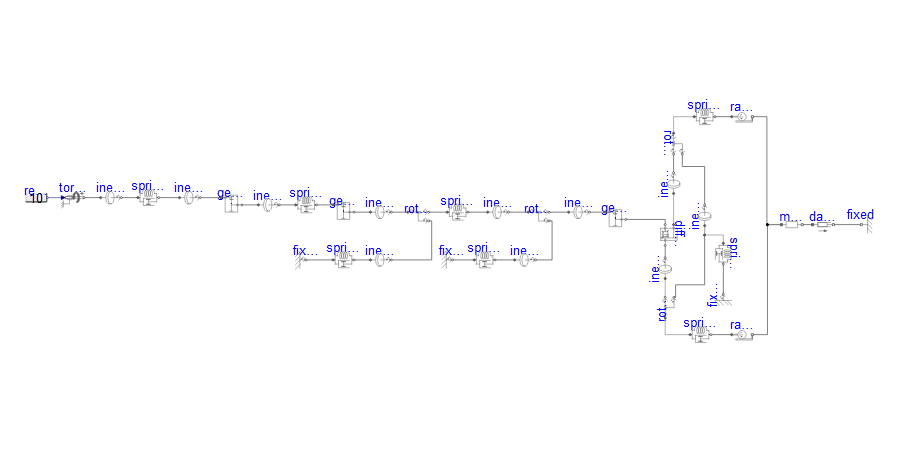
安装式车辆动力传动系统
本示例展示了一个具有物理参数和多个传动比的动力总成模型。
打开示例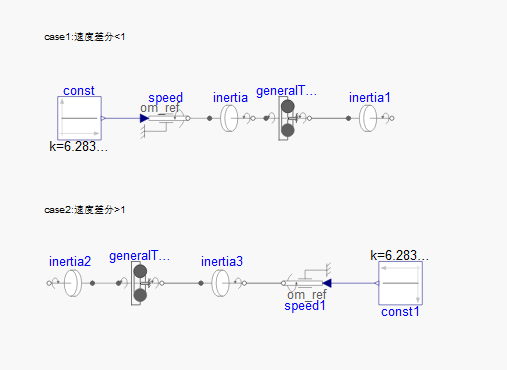
通用变矩对比
该案例描述了通用扭矩转换器的两个操作模式,通用扭矩转换器可以双向驱动。在 Case1,泵轮驱动涡轮机;在 Case2,涡轮机驱动泵轮。
打开示例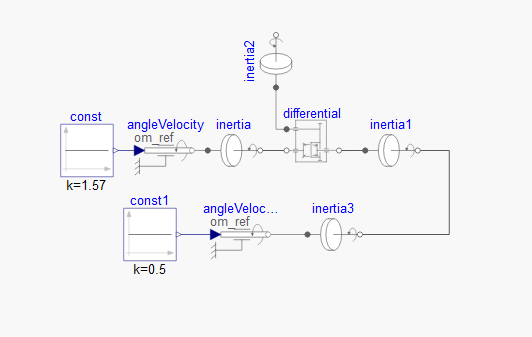
由两个伺服电机驱动的机器人干涉齿轮
该案例模拟了干涉机器人变速箱,这个变速箱由差速箱元件表示,变速箱由中央齿轮处的两个伺服电机驱动。
打开示例 柔性体模型库
悬臂梁
悬臂梁模型是指一端固定另一端自由的梁结构模型,广泛应用于机械工程、土木工程等行业,用来分析梁在承受载荷时的变形和应力分布等。
打开示例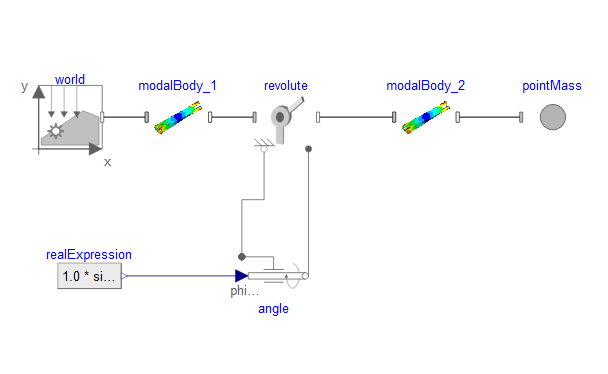
机械臂
机械臂模型是一种模仿人类手臂的机器人,通过多个关节和执行器来执行任务,可应用于抓取、搬运、装配等工业任务,较长机械臂的强度和刚度是其选型的关键。
打开示例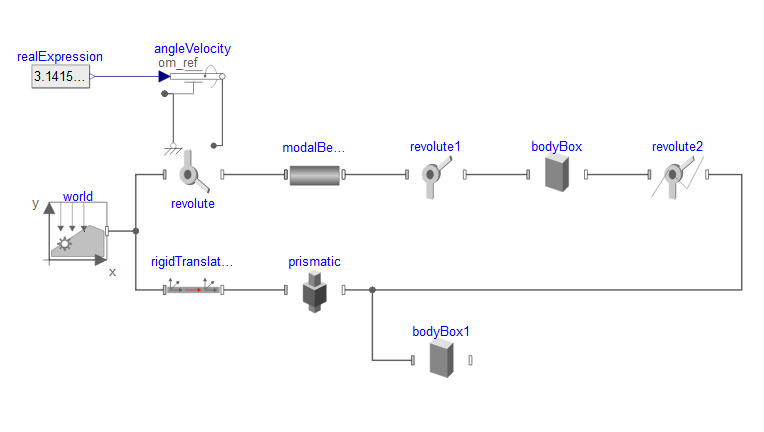
曲柄滑块机构,模态梁
曲柄滑块机构是一种常见的机械传动机构,由曲柄、滑块、连杆等部件组成,通常用于将旋转运动转化为直线往复运动,广泛应用于内燃机、压缩机、气缸等机械自动化系统中。
打开示例
带预载荷的杆
带预载荷的杆模型是描述在设计中已经施加一定预载荷的杆件(如拉杆或压杆)行为的一种力学模型,常应用于机械紧固件、预应力钢索,悬挂系统中的预载荷弹簧等,可以有效提高系统的强度、刚度和稳定性。
打开示例 接触模型库
小球碰撞模拟
该模型是最基础的点点接触模型的示例,可以参考该模型搭建其他类型的接触运动。
打开示例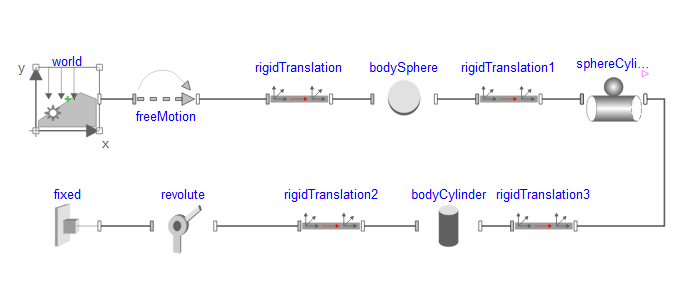
球驱动圆柱转动模拟
该模型是可以模拟两个小球在 X-Z 平面的相对运动和碰撞分离。球体质心的全局初始位置从接口 A 相连的多体元件和球体自身属性设置。在该模型中考虑小球受到的重力,重力沿 y 的负方向。
打开示例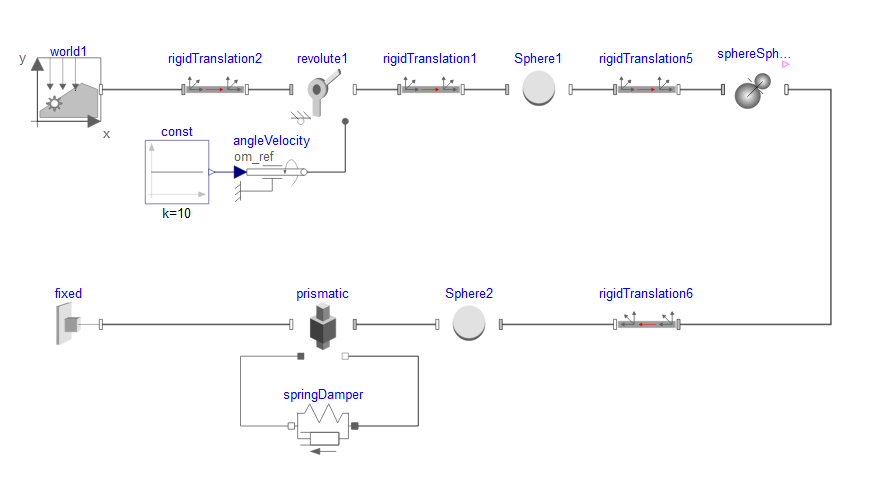
轮系进给机构
该模型是通过偏心选择的球模型和小直径的点模型、弹簧阻尼,模拟凸轮驱动直杆进行固定方向的进给运动。为了防止空负载运动速度过快,用弹簧阻尼模型和固定端模拟杆末端的负载,控制运动速度。
打开示例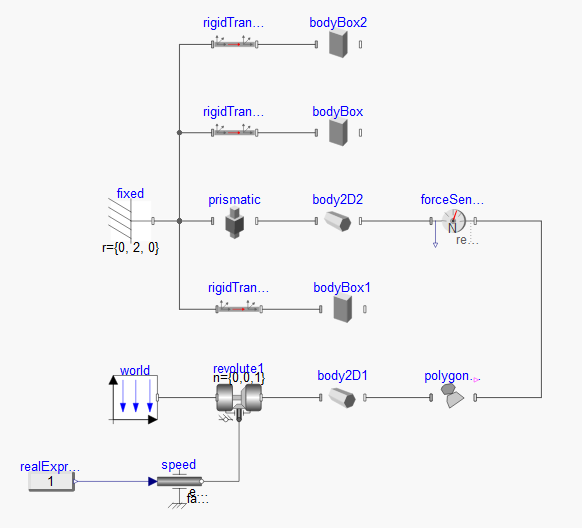
凸轮从动件接触
该模型使用多边形和多边形接触模型模拟在固定平台上的凸轮从动件接触模型,可以模拟汽车气缸、机床运动等相似组件的运动。
打开示例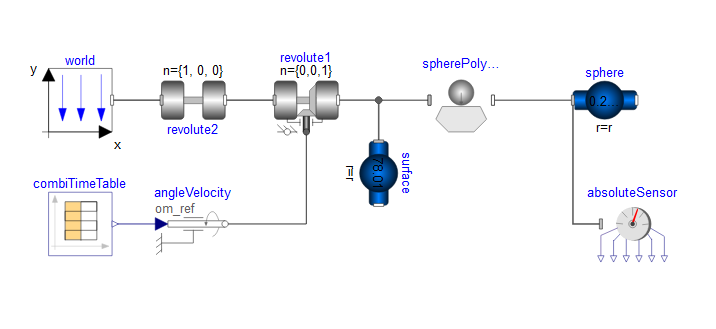
平衡球运动模型
该模型是通过控制平面的转动角度控制小球在平面上的运动,达到平衡小球的位置结果。
打开示例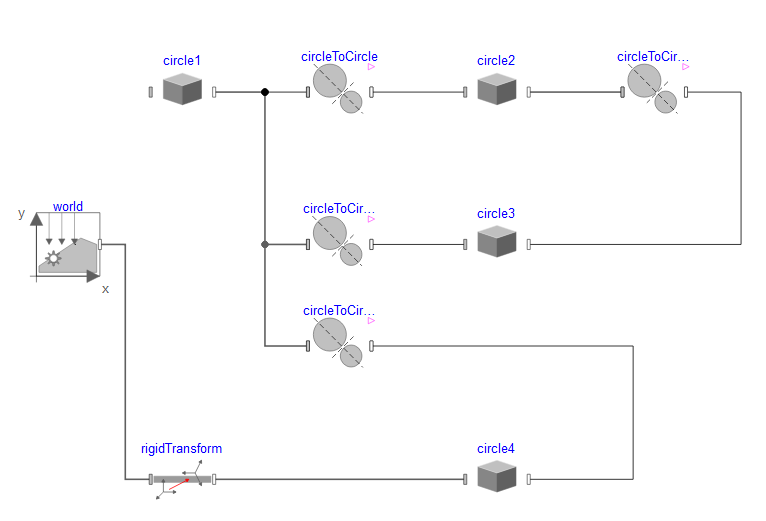
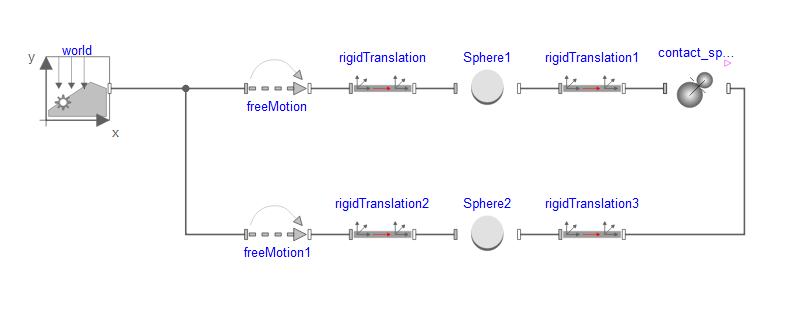
平面多物体碰撞
该模型为多个圆形物体被放置在 XY 平面内,给定各物体不同的初始速度或约束条件,圆形物体之间相互发生接触碰撞,分析不同物体的接触力和运动状态。
打开示例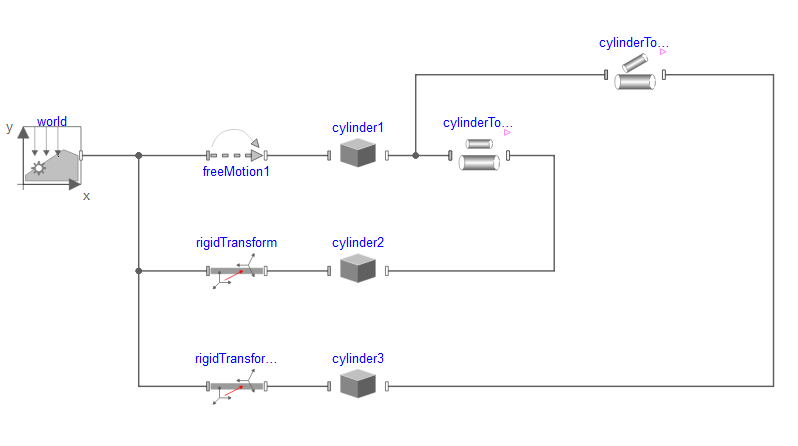
脚手架碰撞模拟
该案例为圆柱和其他两个固定圆柱的线接触模型,可以分析各实体几何之间的组合接触(点接触和线接触)检测,接触力大小的计算。通过接触模型,可以测量和分析接触法向力和摩擦力,判断运动圆柱的接触状态,各方向的运动位移,该案例可以模拟建筑行业中,脚手架的安全接触碰撞检测。
打开示例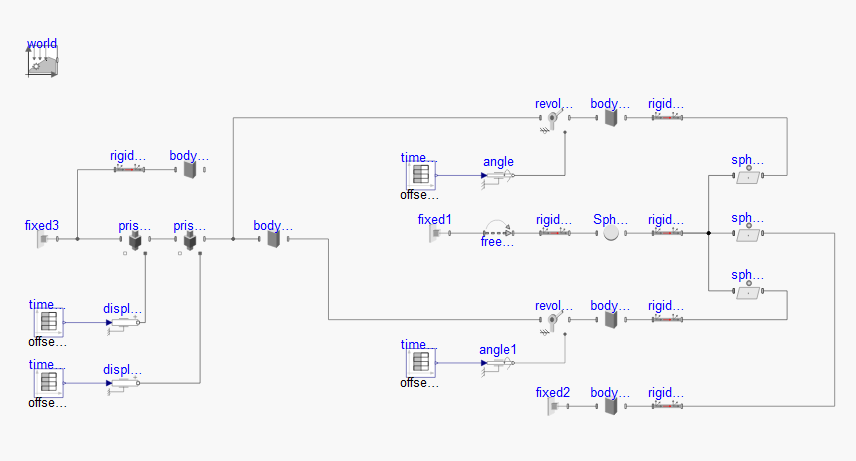
龙门吊车
该模型是可以模拟一个工厂中的固定框架龙门吊车应用场景,可以模拟吊车的水平、垂向位移和物体夹取过程。
打开示例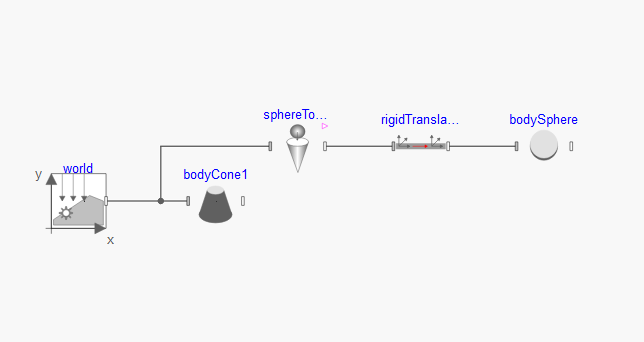
锥形漏斗接触
该模型使用球和圆锥内接触模型模拟球体在锥形漏斗内表面的接触碰撞运动,从顶层位置逐渐向下滚动,多次旋转后从圆锥底部下落。
打开示例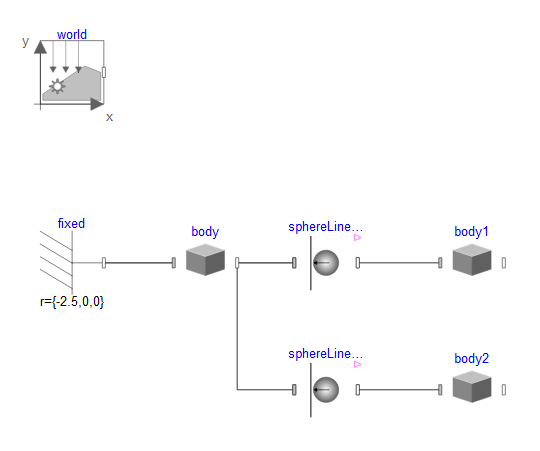
车轮滚动模型
该模型是简单模拟两车轮在地面上的滚动效果。
打开示例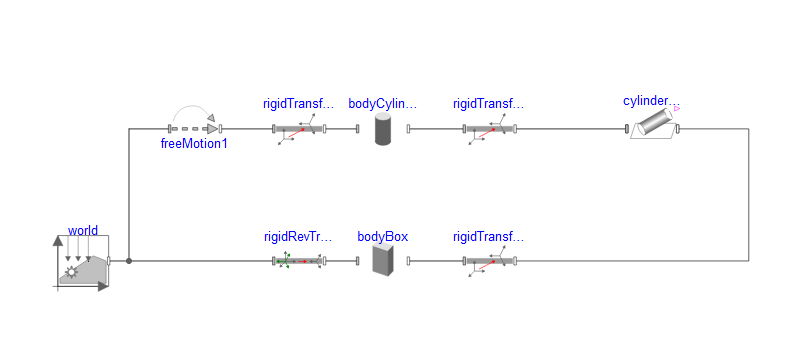
管道与平面之间的接触
本示例展示了如何使用接触模型库和多体模型库中的组件进行管道与平面碰撞的模拟,并对此过程进行可视化。
打开示例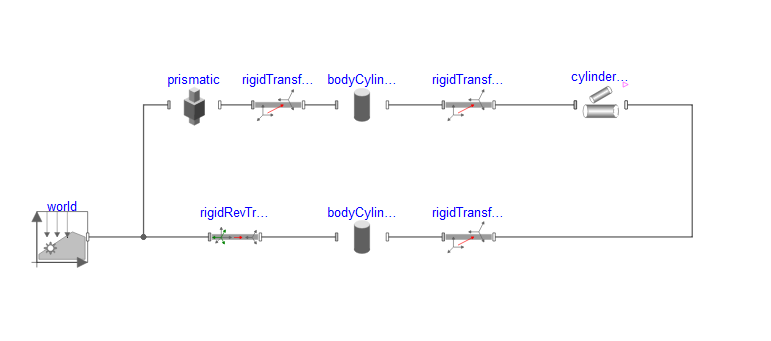
两管道之间的接触
本示例展示了如何使用接触模型库和多体模型库中的组件进行2个管道碰撞的模拟,并对此过程进行可视化。
打开示例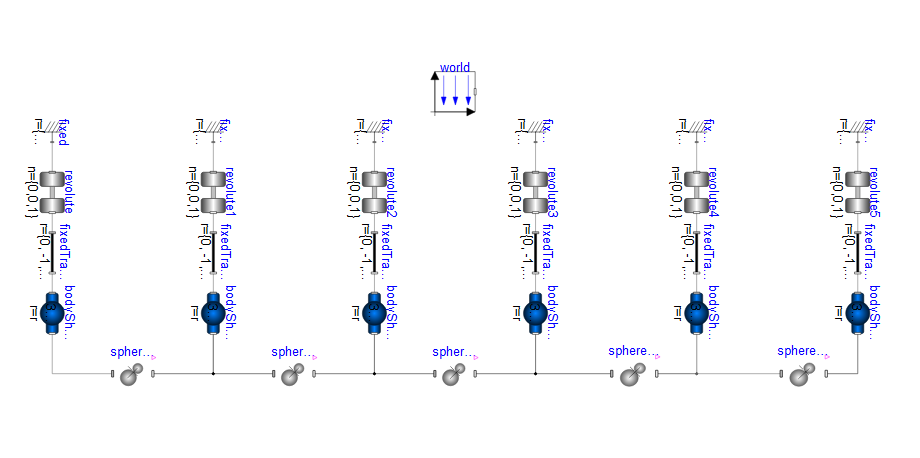
牛顿摆
本示例展示了如何使用接触模型库和多体模型库中的组件进行牛顿摆模拟,并对此过程进行可视化。
打开示例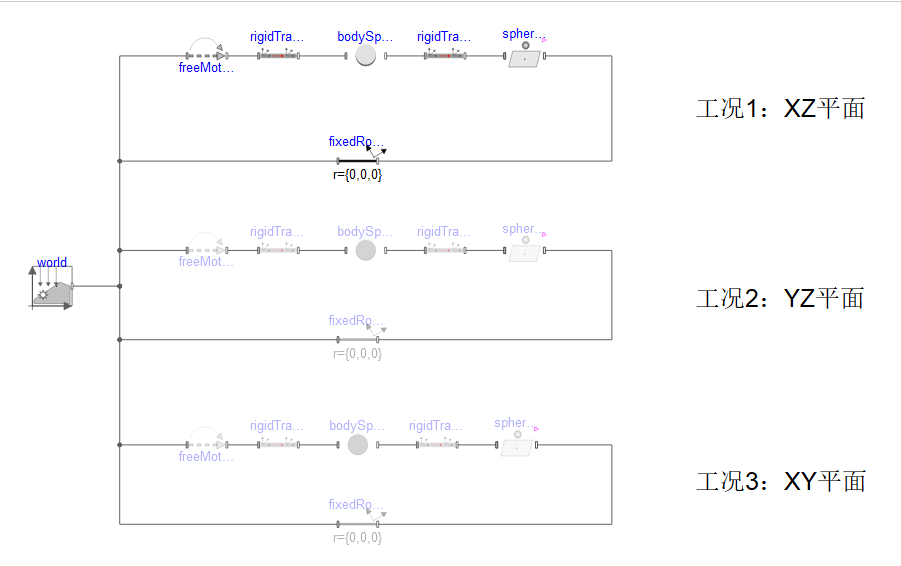
小球与平面碰撞
本示例展示了如何使用接触模型库中的组件进行小球撞击地面的模拟,通过给定3种不同的工况,说明接触模型中平面方向的设定。
打开示例 三维传动系统模型库
绳索滑轮传动系统
悬链线系统
悬链线系统是指在重力场中,由两点悬挂的柔性且不可伸长的链条或绳索在自重作用下所形成的曲线,其形状与抛物线类似。假设绳索完全柔性且自身受到重力和绳索张力共同作用,最终达到平衡状态。通过对绳索离散计算,得到悬链线的形态和变形情况。悬链线系统的应用有:悬索桥设计、长距离高压输电线管道布设等。
打开示例
绳索单摆系统
绳索单摆系统是一种经典的物理系统,该系统研究了简单绳索单摆和实际绳索单摆两种情况。
打开示例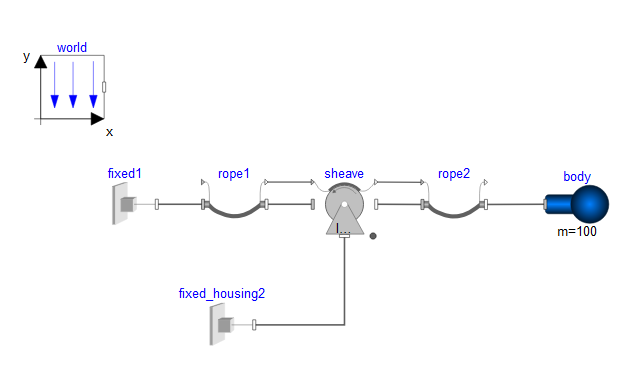
秋千绳系统
秋千绳是一种娱乐设施,其基本结构和原理可以通过绳索单摆来模拟,主要有绳索、定滑轮,由一根固定长度的绳子悬挂在固定点,通过穿过滑轮,末端连接一个集中质量的小球(表示人和座椅的组合),当秋千从某一位置释放后,它在重力的作用下来回摆动。
打开示例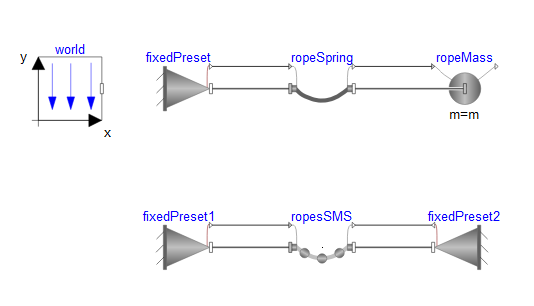
变长度绳索释放系统
该案例有两个系统,分别是绳索长度的变长和变短,第一个是系统是单摆杆自由释放,绳索的长度和质量都减少,第二个系统的两端固定,在右端释放绳子,并通过离散化得到变长度柔性绳索。
打开示例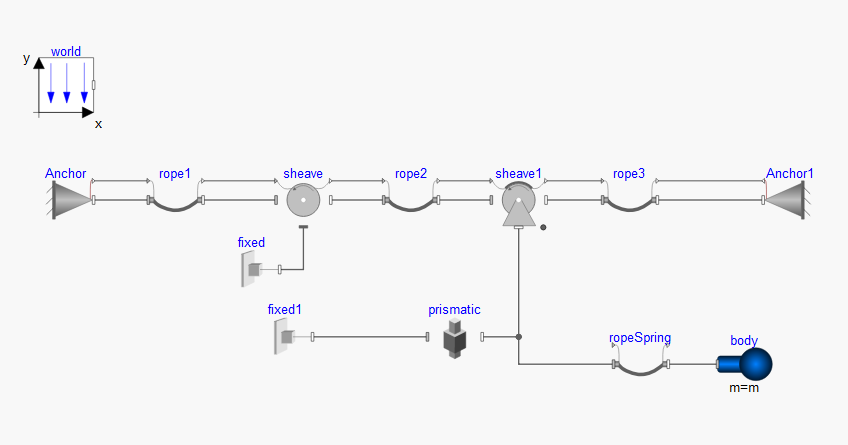
动滑轮模拟
动滑轮系统是绳索滑轮传动系统常用的重要结构,该系统通过牵引绳索,并通过滑轮组来改变绳索的牵引方向和负载传递,从而实现物体的升降。
打开示例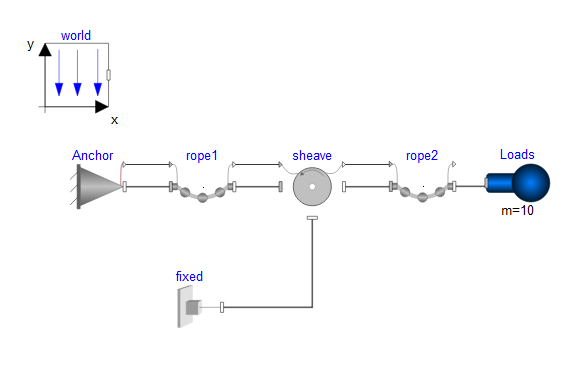
空中拉伸重物系统
该案例模拟重物被拉升场景,使用定滑轮改变力的方向,使得重物匀速上升。
打开示例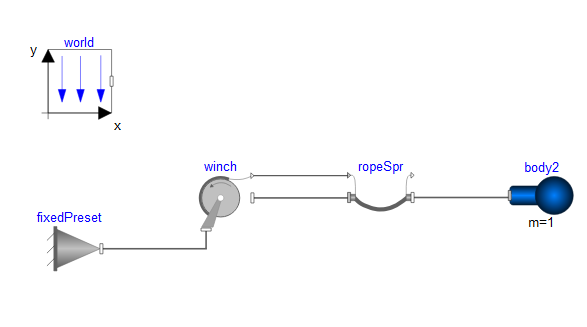
绳索卷出系统 1
该系统模拟绳索从绞盘中卷出的典型场景,通过对受到重力的小球施加初速度,小球将绞盘中的绳索快速拉出,可模拟吊车放钩等应用场景。
打开示例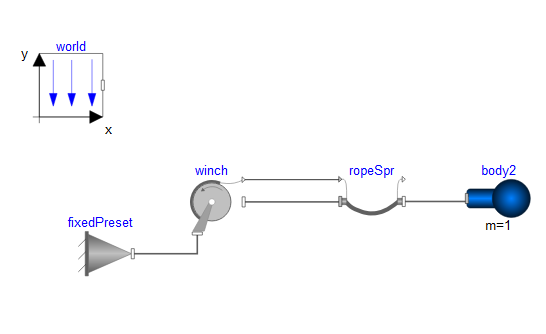
绳索卷出系统 2
该系统模拟绳索从绞盘中卷出的典型场景,在无重力的环境下,对物体施加一个水平初速度,可以将绳索匀速拉出,可模拟抽纸、抽绳等生活场景。
打开示例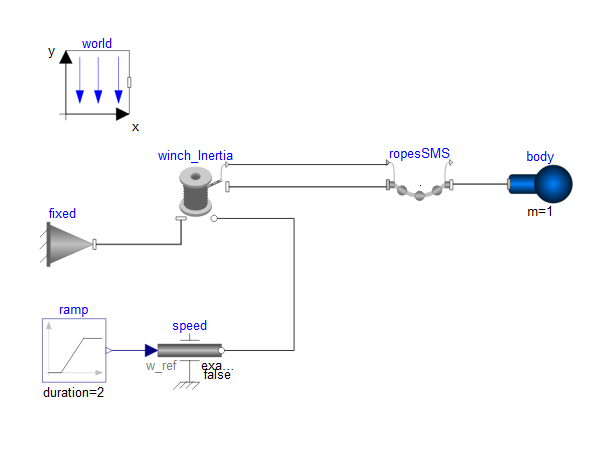
绳索收卷系统
该系统模拟绞盘将绳索卷入(收卷)的典型场景,通过对绞盘施加驱动,绞盘以恒定角速度顺时针卷动时,任意位置的重物被卷回,可模拟吊车拖拽应用场景。
打开示例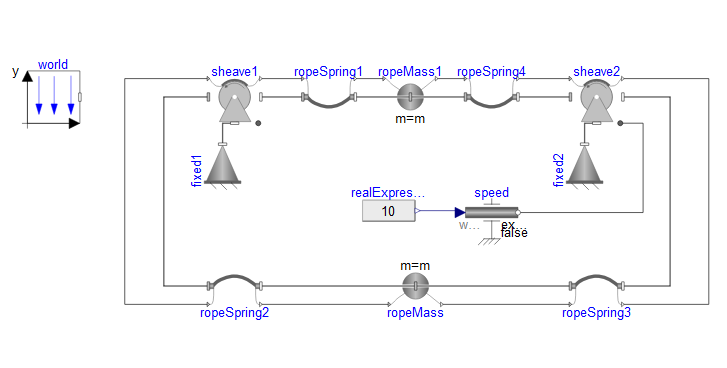
简单绳索传动系统
该系统通过对两个滑轮和多段绳索组成的简单绳索传动回路进行模模拟,通过对主动轮施加角速度驱动,带动从动轮的运动。
打开示例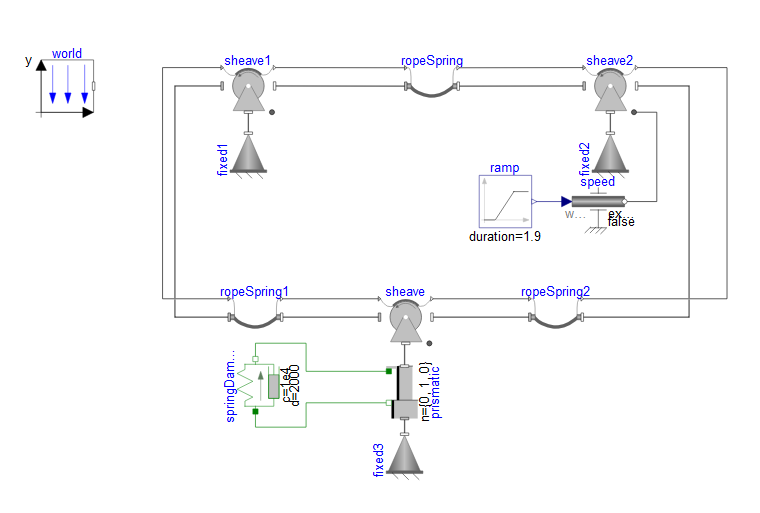
带张力控制的绳索传动系统
该系统通过对两个滑轮和多段绳索组成的简单绳索传动回路进行模模拟,该系统具有一个张力控制轮,可进行张力调节,并通过对主动轮施加角速度驱动,带动从动轮的运动。
打开示例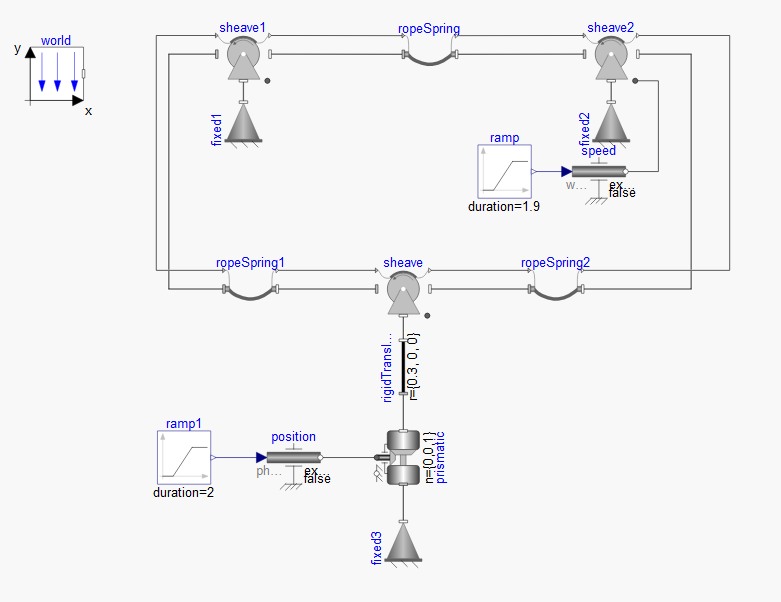
带浮辊的绳索传动系统
带浮辊的绳索传动系统,通常将浮辊安装在摆臂滑轮位置,是一种常用的张力控制装置,该系统区别去直线弹簧控制,它能够吸收张力变化瞬间的剧烈波动,张力控制较为平稳。进而可以通过添加PID控制器,计算所需驱动单元速度的调整量。
打开示例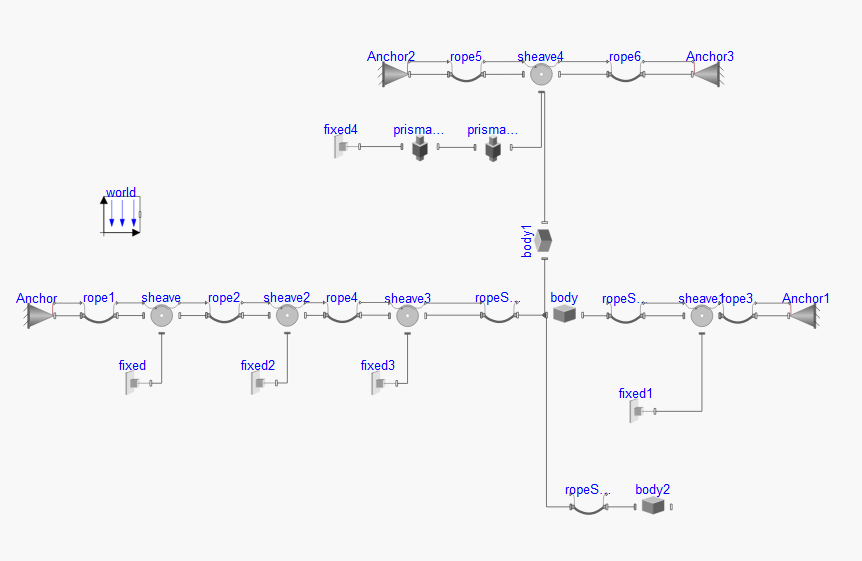
缆车张紧控制系统
缆车张紧控制系统常用于景区缆车或者运输货物缆车,其基本结构和原理可以通过绳索传动来模拟,主要有弹性绳索、定滑轮,动滑轮、移动车厢等,通过穿过两端的定滑轮,有一个绳索上的滑轮往复运输,并通过控制该段绳索的张力,调整相应的位置。
打开示例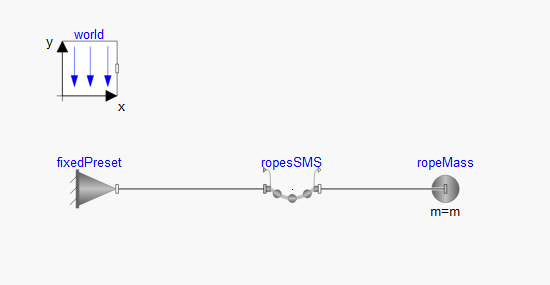
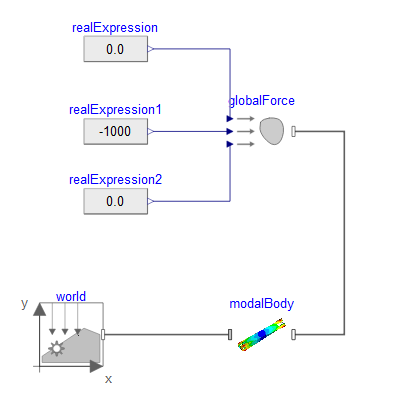
绳索受到风载模拟
该系统模拟在重力和风载荷作用下的绳索的运动,并通过全局力简化风载荷对绳索的作用,计算绳索的动力学响应。
打开示例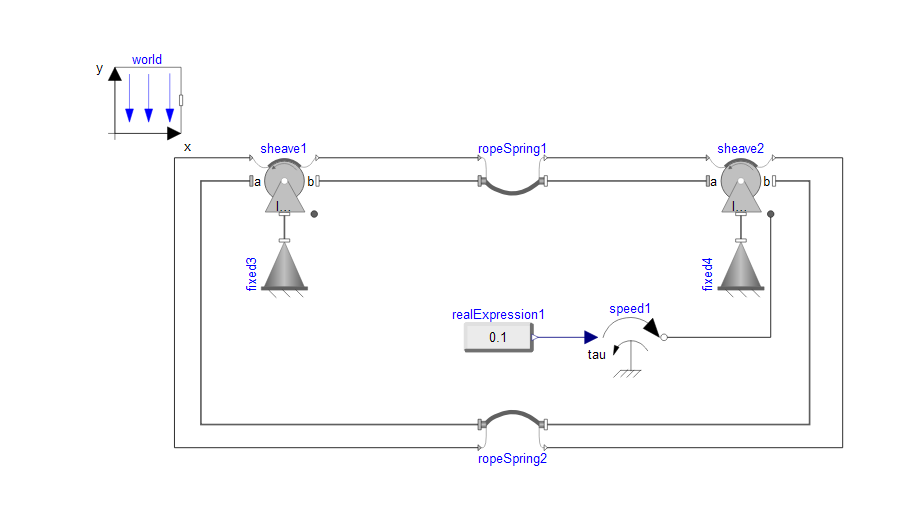
交叉绳索传动
该案例是一类典型的柔性传动机构,通常由两个滑轮和一根绳索组成。与平行直绕的传动方式不同,交叉缠绕通过改变绳索在两个滑轮之间的绕行路径,使两个滑轮在传递过程形成反向转动关系。
打开示例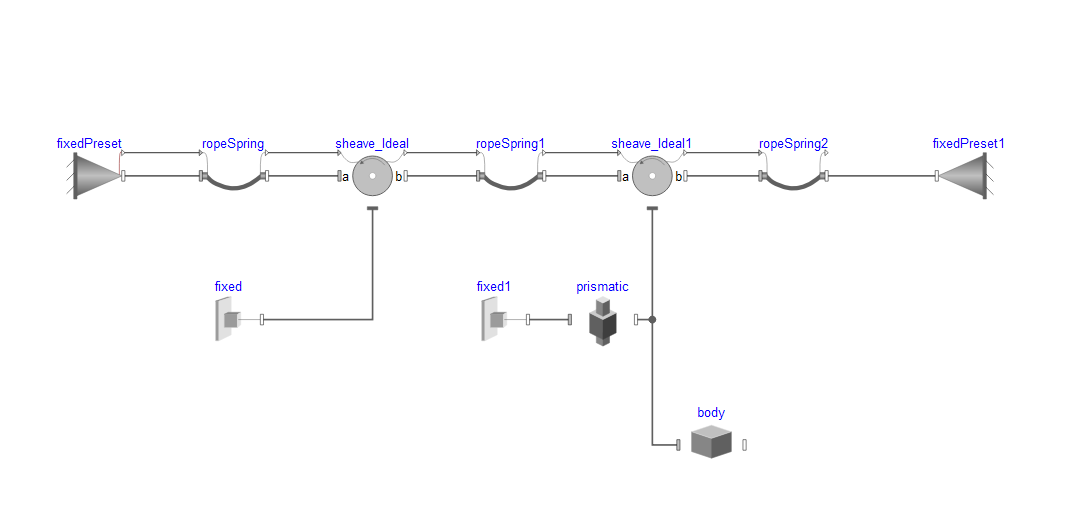
动滑轮系统演示
塔吊作为建筑施工中常见的重型起吊设备,其绳索滑轮系统是实现吊装操作的关键部件。
打开示例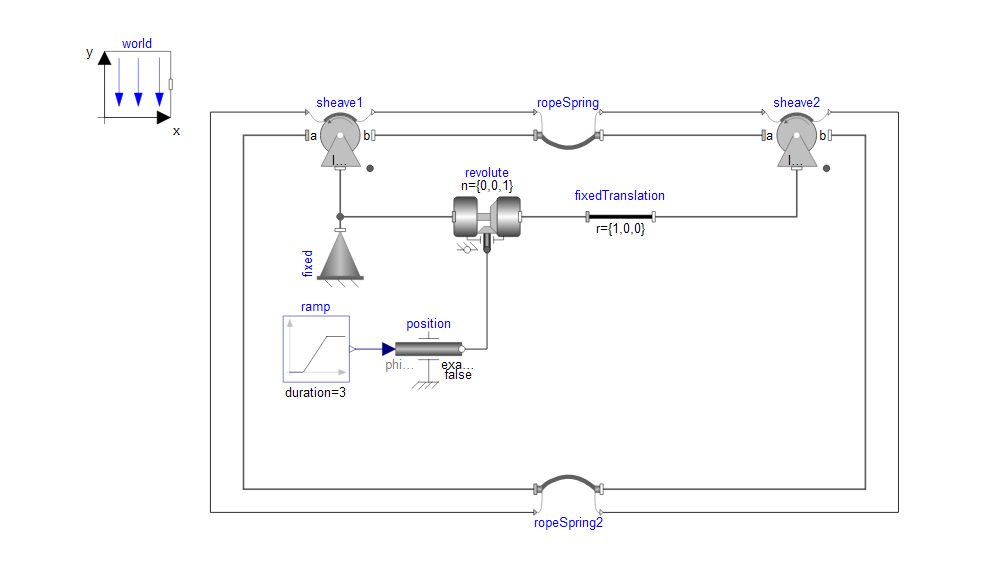
滑轮公转运动模拟
该案例研究是一种绳索滑轮联动机构,其运动形式类似于台灯底座或者连杆式补偿机构。系统由一个固定轴滑轮和一个活动滑轮组成,固定滑轮的转轴位置保持不变,活动滑轮的转轴则在绳索带动下绕固定滑轮做公转运动。两个滑轮之间通过绳索建立无滑移传动关系,从而使活动滑轮在公转的同时产生自转。该机构常用于远距离角度传递、姿态同步等,在机械臂、折叠灯具和联动支撑装置中具有典型应用价值。
打开示例 链条链轮传动系统
上升驱动链条链轮传动系统
上升驱动链条链轮驱动系统广泛应用于机械传动系统中,它由链轮、链条和驱动源组成。链轮通过链条与另一个链轮相连,通过将链轮链条安装在竖向方向,实现动力传递和旋转。驱动链轮通过电机或者其他动力源驱动,可以将动力传递到不同高度的链轮上,从而实现垂直传动。
打开示例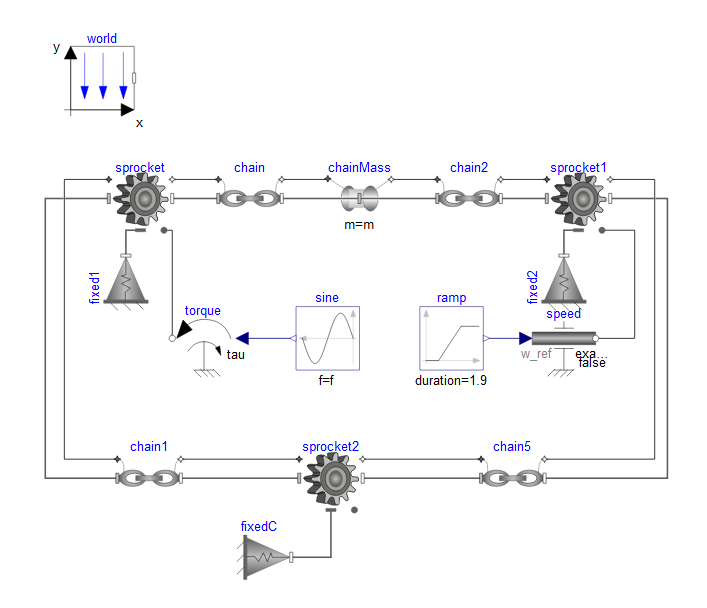
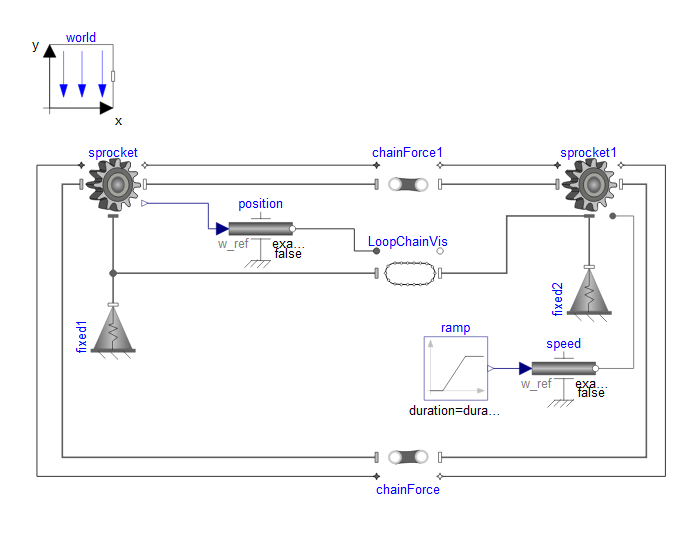
带有张紧轮的链条传动系统
该系统通过对两个链轮和多段链条组成的 2 链轮链条传动回路进行建模模拟,该系统具有一个张紧链轮,可进行张力调节,并通过对主动轮施加角速度驱动,带动从动轮的运动。
打开示例 齿轮传动系统
内啮合直齿齿轮
本示例展示了如何使用内啮合直齿齿轮,并对此过程进行可视化。内啮合直齿齿轮是一种特殊的齿轮设计,由一个内齿轮和一个外齿轮组成,其中外齿轮位于内齿轮的内部,通过内外齿轮的啮合实现动力传递,具有紧凑型、高载荷能力和低噪音等优势。
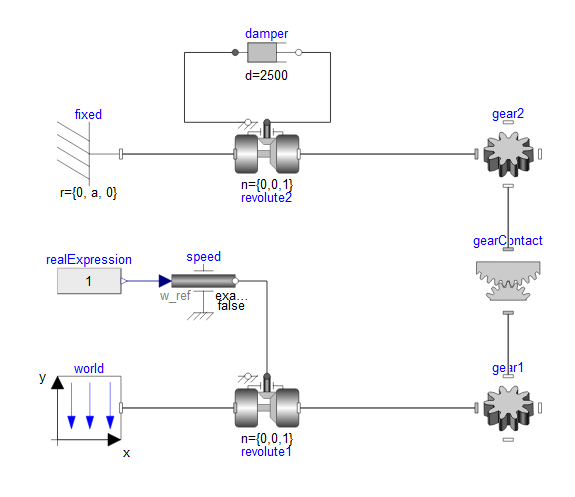
打开示例 外啮合直齿齿轮传动
外啮合直齿齿轮传动是机械传动中一种常见的方式,主要用于传递旋转运动和扭矩,其结构简单且制造成本低,广泛应用于各种机械设备之中。在该案例中,两个外啮合齿轮通过直齿啮合力接触模型相连接,确保在啮合过程中传递的动力平稳且高效。
打开示例 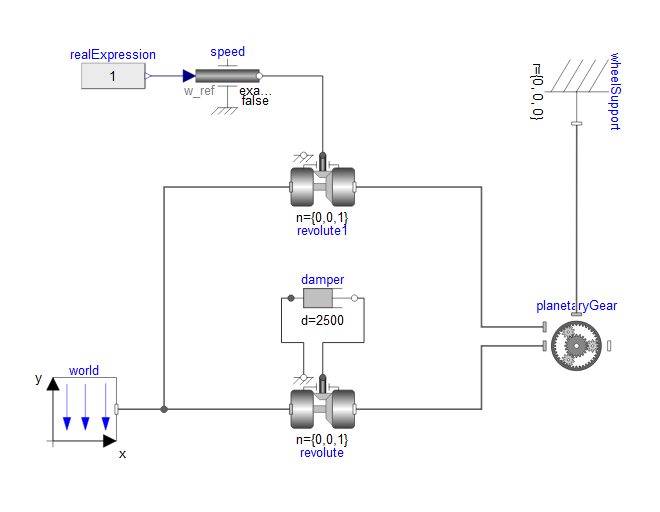
行星齿轮
行星齿轮系统是一种复杂的齿轮传动机构,广泛应用于自动变速器、机器人和航空航天等领域。该系统由一个中心的太阳轮、多个行星轮和一个内齿圈组成,行星轮围绕太阳轮旋转,同时在内圈内进行啮合,实现高效的动力传递。
打开示例 带传动系统
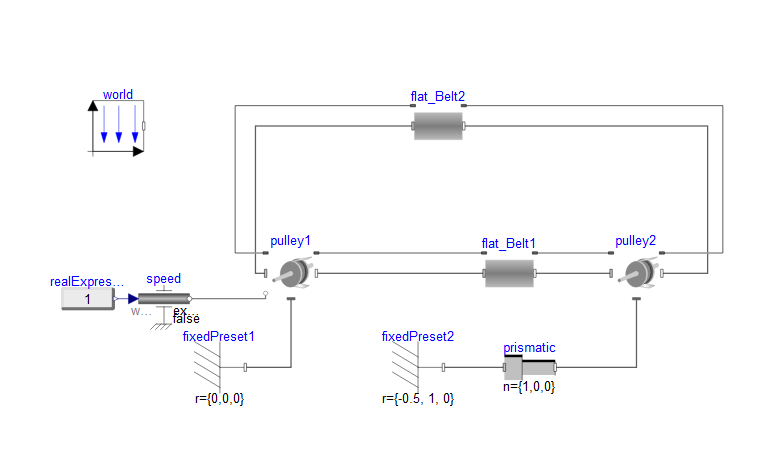
两轮带传动系统
两轮带传动系统是皮带传动系统常用的重要结构,带轮通过皮带传递转动,从而驱动其他结构。
打开示例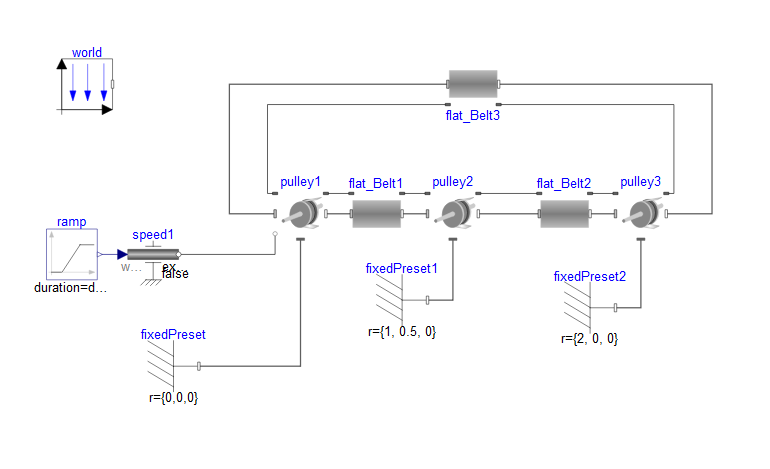
三轮带传动系统
三轮带传动系统是在二轮带传动系统的升级,通过增加一个带轮传动,能够实现皮带传动系统的空间跨度的提升,旨在模拟带传动的效果。
打开示例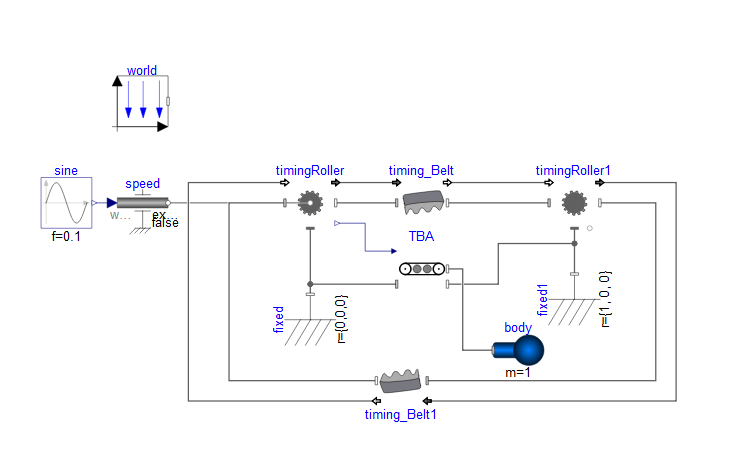
同步带输送系统
同步带输送系统是以同步带为牵引和承载构件,通过同步带轮的齿形啮合实现动力传递和物料舒适的自动化设备。它区别与普通传送带,核心优势是无滑移,传动比精准。
打开示例 轴承
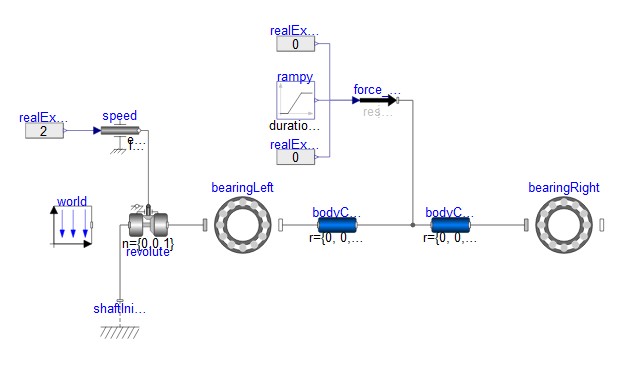
滚子轴承支撑简支梁
滚子轴承支撑简支梁模型是分析轴在滚子轴承支撑下受力和变形的方法,在该模型中,轴的两端通过滚子轴承固定,轴的中间受到集中力的作用,形成简支梁结构,允许轴自由转动但是不允许纵向位移。由于滚子轴承具有低摩擦特性,能够显著减少能量损失。从而提高系统的运行效率。
打开示例 空间机构传动系统
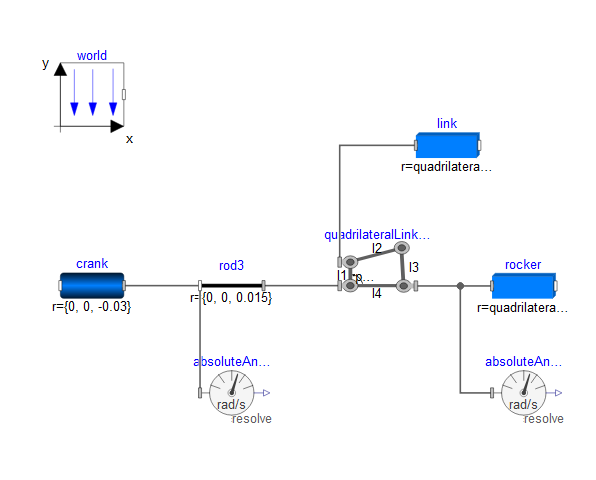
四连杆机构
四连杆机构是一个经典的平面机械模型,该案例中的模型可以代替传统的由刚性构件和低副关节连接的几何机构,直接用约束方程的解析解表示四杆机构,可以减少四杆机构的组合调试过程,提高模型效率。
打开示例
曲柄滑块系统
曲柄滑块机构是一个经典的平面机械模型,该案例中的模型可以代替传统的由刚性构件和低副关节连接的几何机构,直接用约束方程的解析解表示曲柄滑块机构及其动画设置,可以减少曲柄滑块机构的连接、初始位置调试过程,提高模型效率。
打开示例 平面机械模型库
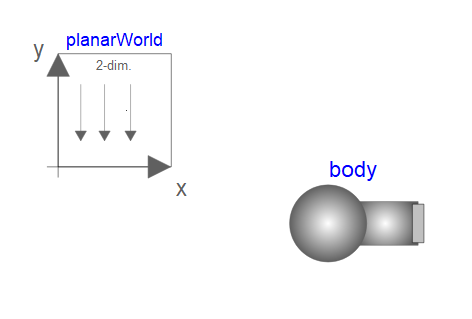
刚体自由落体
展示了刚体自由落体模型。
打开示例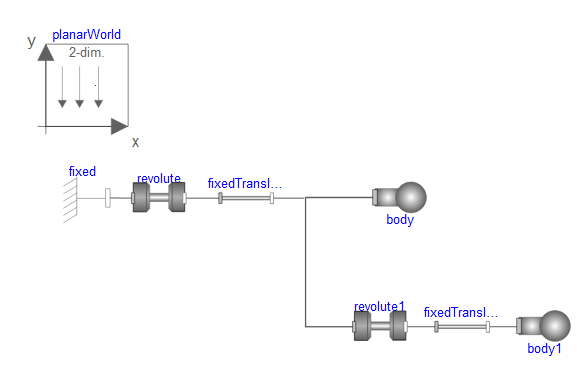
双摆模型(自由摆)
展示了简单双摆模型。
打开示例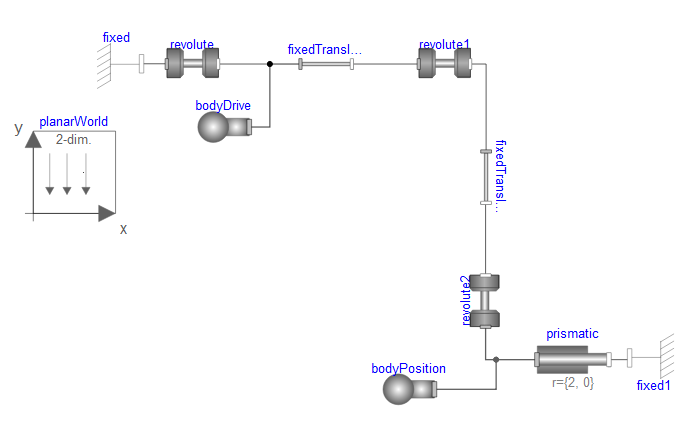
曲柄滑块机构
展示了曲柄滑块机构模型。
打开示例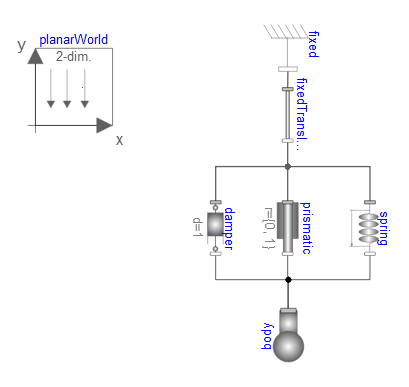
弹簧示例
展示了弹簧示例模型。
打开示例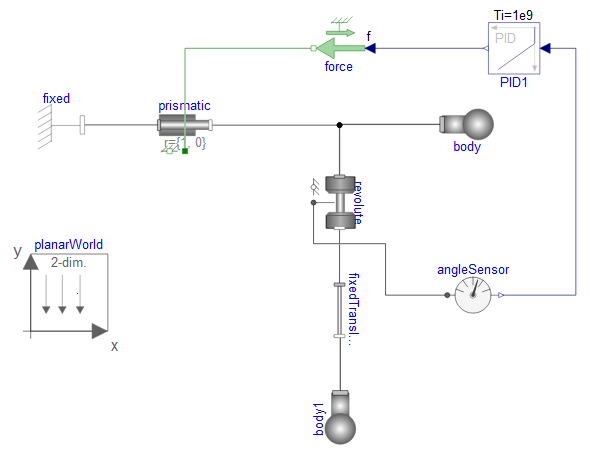
自平衡杆
展示了自平衡杆模型。
打开示例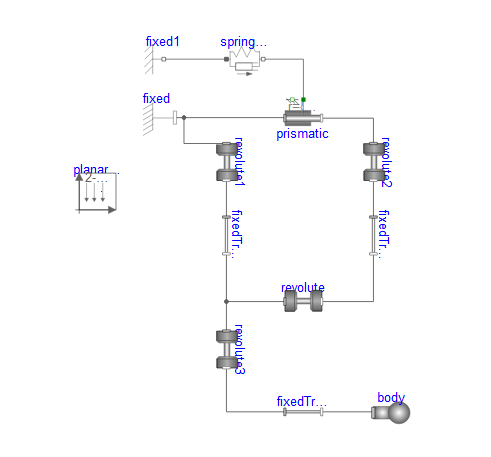
运动学分析
该案例通过转动副和连杆模拟三角形支架的相对运动。
打开示例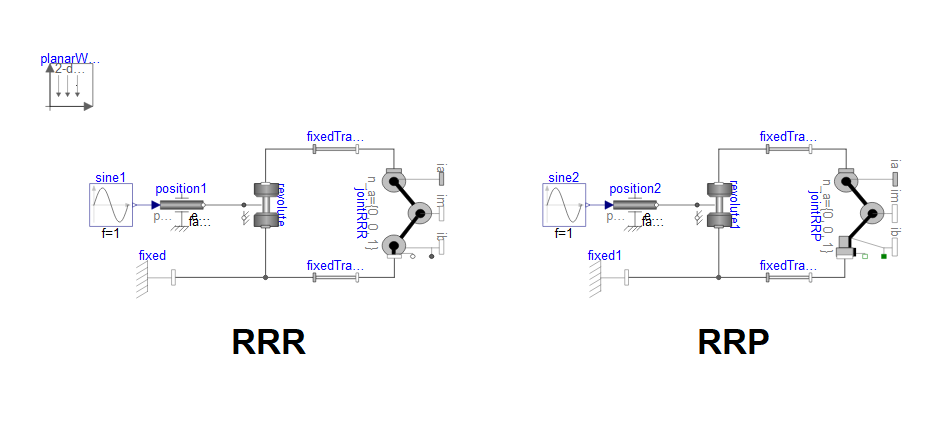
复合铰使用
该案例模拟转动和平动复合铰接模型的使用方法。
打开示例
动画组件使用
该案例介绍高级动画组件的使用方法。
打开示例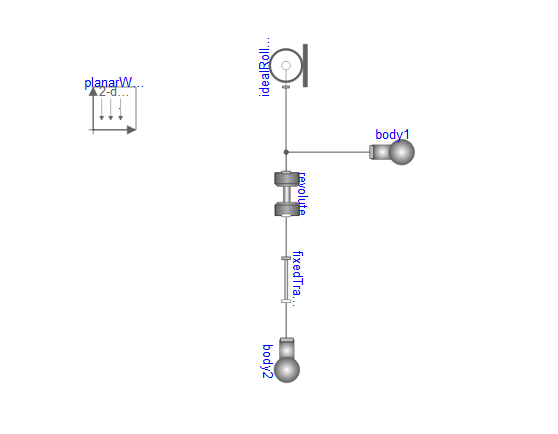
车轮蟹行运动
该案例模拟车辆转动过程中的蟹行摆动运动。
打开示例