# 纯电动车 0~100 公里加速
本文使用 TAEconomy 车辆动力性经济性模型库进行拖拽建模,创建车辆加速过程分析模型,展示车辆动力性经济性模型库的示例。
# 案例介绍
此案例以百公里加速工况为例,该工况是车辆动力性测试中的常见工况,本示例可以通过参数设置工况,实现车辆百公里加速的仿真测试,驾驶员模型控制车辆的加速踏板和制动踏板开度,整车传动系统将操作输入转换为电机扭矩并输出至驱动轮。仿真结果可用于评价车辆的动力性能,或者用于车辆零部件选型开发。
# 相关组件
经过模型分析后,车辆模型中对应的模型组件如下表所示:
| 模型名称 | 模型英文名称 | 模型路径 |
|---|---|---|
 接地 接地 | GroundSinglePort | TAEconomy.Electronic.ELoad.EModel.GroundSinglePort |
 电池模型 电池模型 | Battery | TAEconomy.Electronic.Battery.Model.Battery |
 电子负载 电子负载 | ELoad_Res | TAEconomy.Electronic.ELoad.EModel.ELoad_Res |
 电机 电机 | Machine | TAEconomy.PowerSystem.EMotor.Machine |
 加速工况 加速工况 | Driver_0_xkmh | TAEconomy.Drivers.Driver_0_xkmh |
 主减速器 主减速器 | Final_Gear | TAEconomy.Driveline.GearBox.GearModel.Final_Gear |
 后轮驱动 后轮驱动 | RWD | TAEconomy.Driveline.RWD |
 车辆模型 车辆模型 | Vehicle | TAEconomy.Vehicle.Vehicle |
 制动系统 制动系统 | Brake_System | TAEconomy.Vehicle.Brake.Brake_System |
 驱动电机控制 驱动电机控制 | EAuto_Acc_Ctrl_LoadSignal | TAEconomy.Controller.Component.DynamicControl.EAuto_Acc_Ctrl_LoadSignal |
 制动控制 制动控制 | EAuto_Brake | TAEconomy.Controller.Component.DynamicControl.EAuto_Brake |
# 物理模型
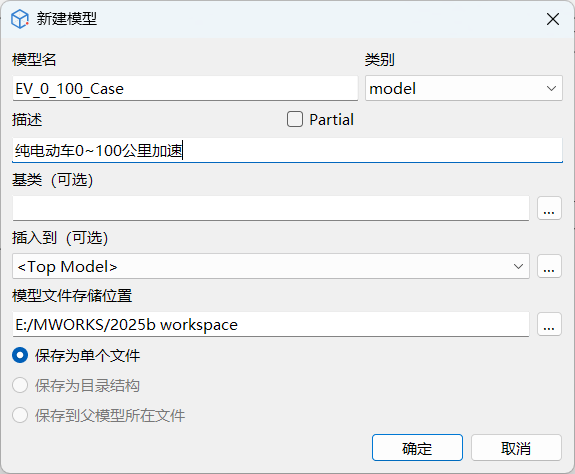
进入文件 > 新建 Modelica 模型 > model…。
在新建模型面板中,填写模型名为
EV_0_100_Case,描述为纯电动车0~100公里加速。选择模型文件存储位置后,单击确定,完成模型创建。
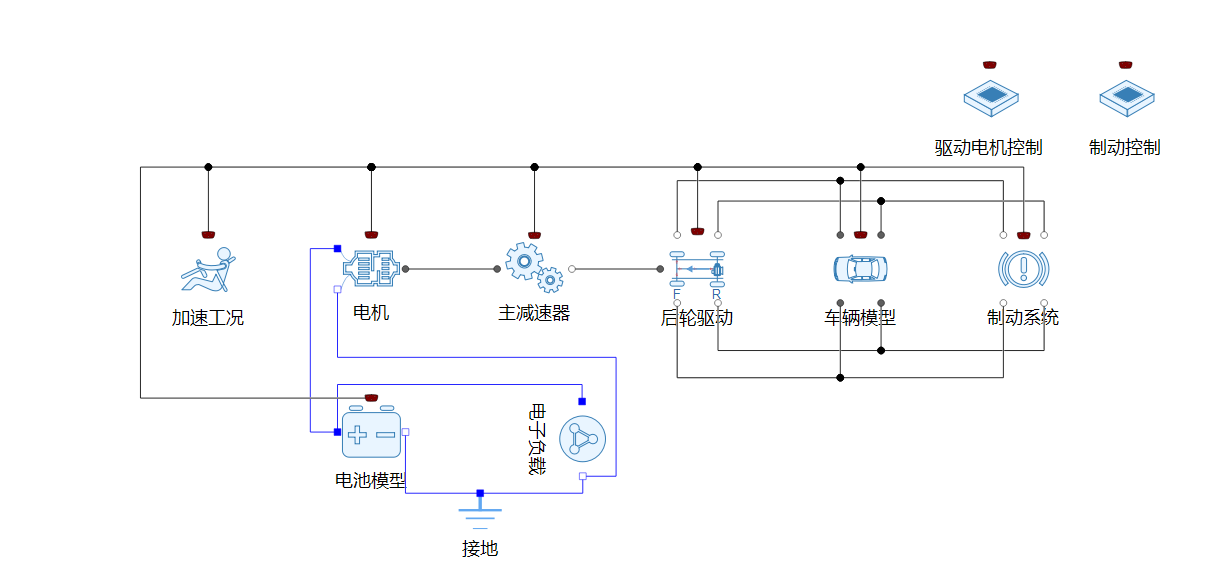
拖拽相关组件,完成模型选择和连接。
根据机构数据,进行相关参数设置。相关模型的参数设置如下表所示,未给出的参数保持默认值。
- 电机参数表格
| 模型名称 | 参数名称 | 参数说明 | 单位 | 参数设置 |
|---|---|---|---|---|
| machine | EAutoMotor | 是否使用 LoadSignal,负责使用 pedalMap 扭矩控制 | Boolean | true |
| inputType | 电压 Map 数量,需要基于多电压插值可用 | - | 2 | |
| u1 | Map 1 电压 | V | 200 | |
| u2 | Map 2 电压 | V | 400 | |
| TorqueTable_max_mot_u1 | 电机在电压 1 下的外特性曲线,第一列为转速 rpm,第二列为扭矩 Nm | - | {1.00E-04, 240}, {500, 240}, {1000, 240}, {1500, 240}, {2000, 240}, {2500, 240}, {3000, 240}, {3500, 205}, {4000, 180}, {4500, 160}, {5000, 140}, {5500, 130}, {6000, 120}, {6500, 110}, {7000, 105}, {7500, 95} | |
| TorqueTable_max_mot_u2 | 电机在电压 2 下的外特性曲线,第一列为转速 rpm,第二列为扭矩 Nm | - | {1.00E-04, 240}, {500, 240}, {1000, 240}, {1500, 240}, {2000, 240}, {2500, 240}, {3000, 240}, {3500, 205}, {4000, 180}, {4500, 160}, {5000, 140}, {5500, 130}, {6000, 120}, {6500, 110}, {7000, 105}, {7500, 95} |
- 其他组件参数表格
| 模型名称 | 参数名称 | 参数说明 | 单位 | 参数设置 |
|---|---|---|---|---|
| driver_0_xkmh | controller | 选择整车驱动控制类型,可选纯电动车型控制器 Loadsinal | - | 纯电动车型控制器 Loadsinal |
| startVelocity | 计时起始车速 | km/h | 0 | |
| targetVelocity | 计时结束车速 | km/h | 100 | |
| battery | SOCInit | 电池初始 SOC | - | 1 |
| QCellNominal | 电池额定容量 | Ah | 110 | |
| vehicle | m_total | 整车质量 | kg | 1700 |
| eACC | nMachine | 整车电机数量 | - | 1 |
| eBrake | nMachine | 整车电机数量 | - | 1 |
# 结果分析
针对该案例,单击仿真,结果曲线如下所示:
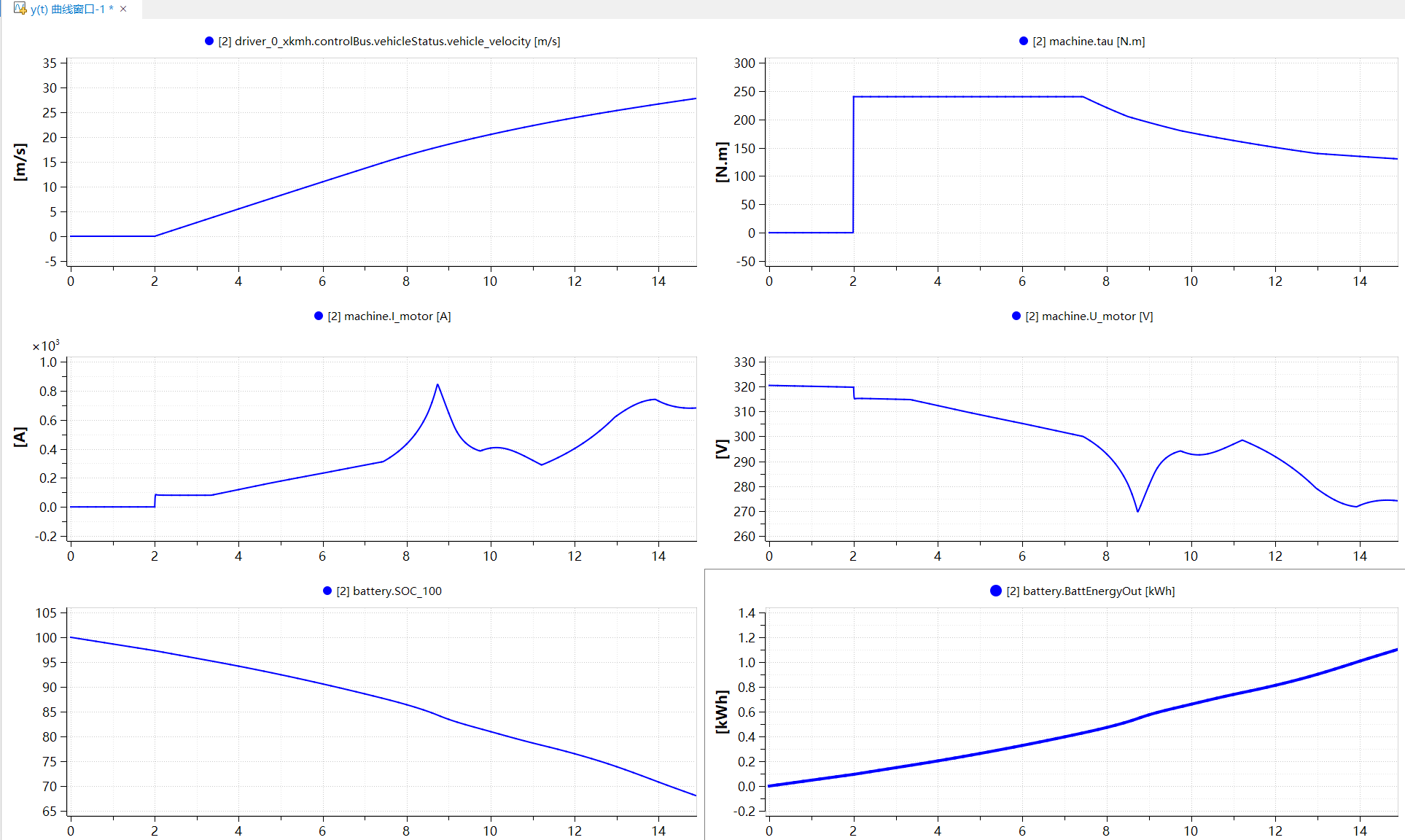
从仿真结果可以看出,车辆从 2 s 开始从 0 加速,在 14.8796 s 速度达到 100 km/h,车辆相关的电机扭矩、电流、电压和电池百分比电量、加速耗电量都在仿真结果图中,满足期望数值。
提示
- 建模前请学习 Modelica 简介的相关内容。
- 更多模型使用技巧请参考车辆动力性经济性模型库帮助文档。