# 创建铲斗机构的多体模型
在本案例中,您将学习按照如下步骤创建铲运机铲斗机构的多体模型:
- 导入 CAD 模型
- 将零部件分组
- 添加连接和驱动
- 生成 Modelica 模型
- 打开铲运机铲斗机构模型
- 仿真及结果查看
机构解析:
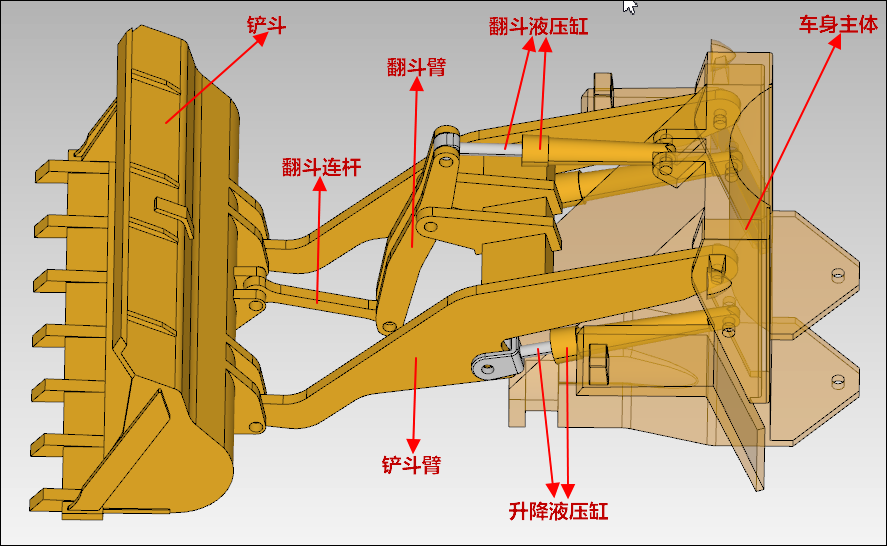
- 车身主体组为除图中零件外所有零件的组合
- 车身主体与翻斗液压缸之间为转动副
- 车身主体与升降液压缸之间为转动副
- 车身主体与铲斗臂之间为转动副
- 翻斗液压缸与翻斗液压活塞(白色部分)之间为平移副
- 升降液压缸与升降液压活塞(白色部分)之间为平移副
- 翻斗液压活塞与翻斗臂之间为转动副
- 升降液压活塞与铲斗臂之间为转动副
- 铲斗臂与翻斗臂之间为转动副
- 翻斗臂与翻斗连杆之间为转动副
- 翻斗连杆与铲斗之间为转动副
- 铲斗与铲斗臂之间为转动副
# 导入 CAD 模型
获取模型,右击 -> 弹出上下文菜单 -> 将链接另存为:bulldozer.STEP;
启动 Sysplorer,单击工具 > CAD 工具,打开 CAD 工具窗口;
单击导入,选择
bulldozer.STEPCAD 文件,然后单击打开,弹出 CAD 工具窗口,并加载模型,等待模型导入完成。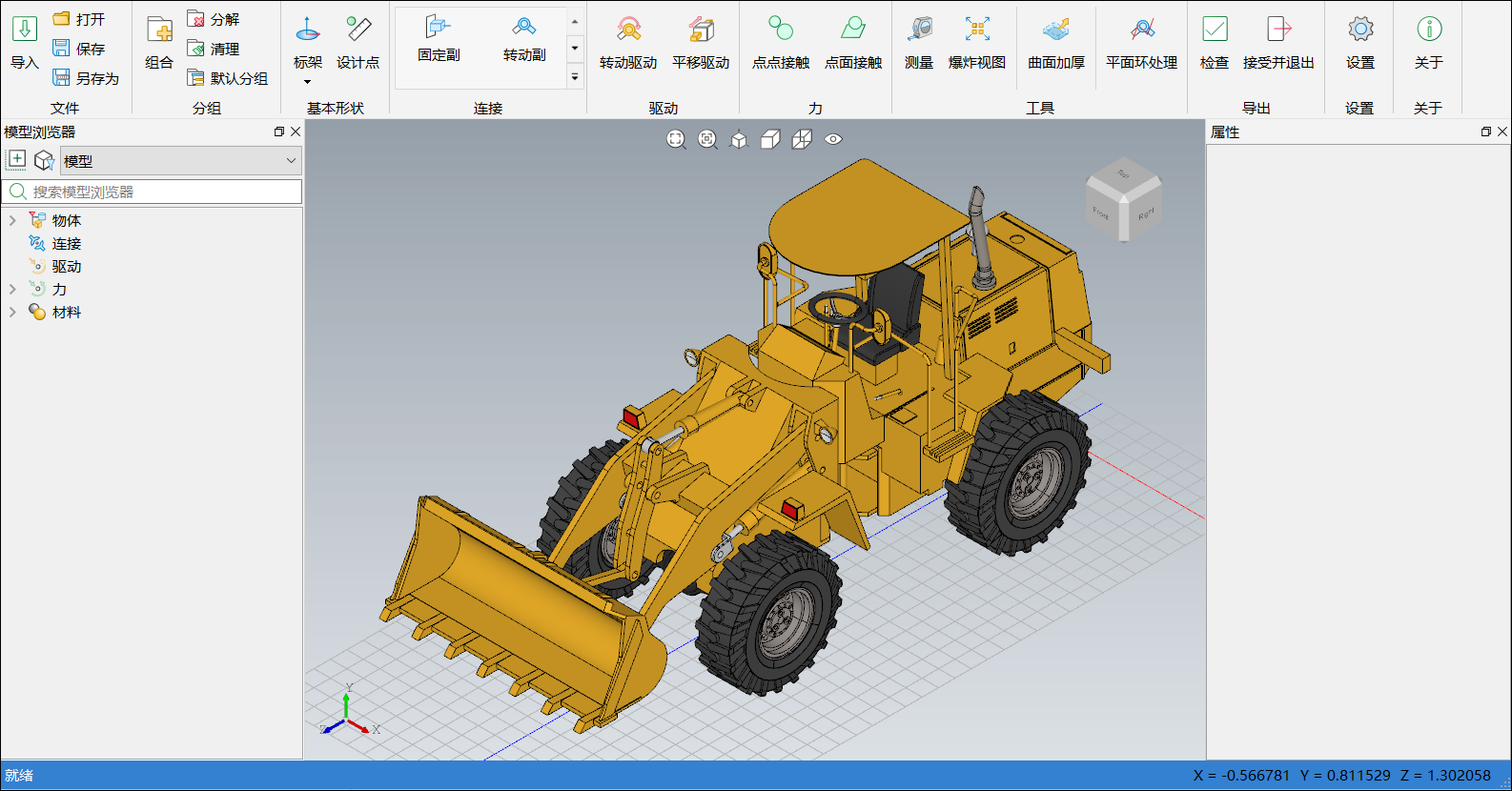
# 将零部件分组
将 CAD 模型导入工具后,需要将不产生相对运动的零部件组合为一个整体,即分组。
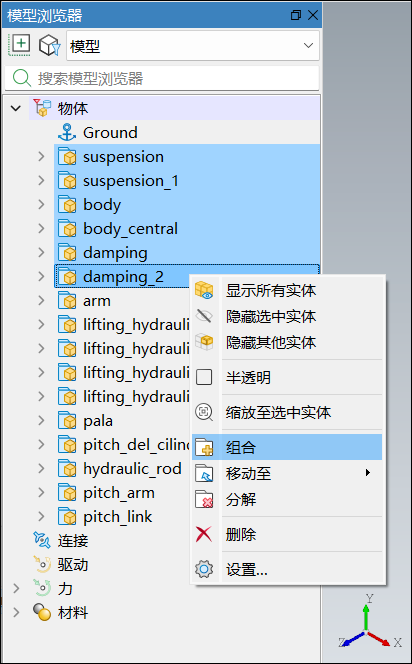
在 CAD 工具窗口左侧的模型浏览器中,按住 Ctrl 键并选择图中的组;
右击弹出上下文菜单,然后选择组合,或者单击菜单栏中的组合,弹出选项-组合侧边栏;
在弹出的选项-组合窗口中,名称字段输入
base;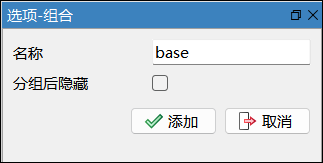
单击添加,模型树将新增一个
base组,包含整个车身部分;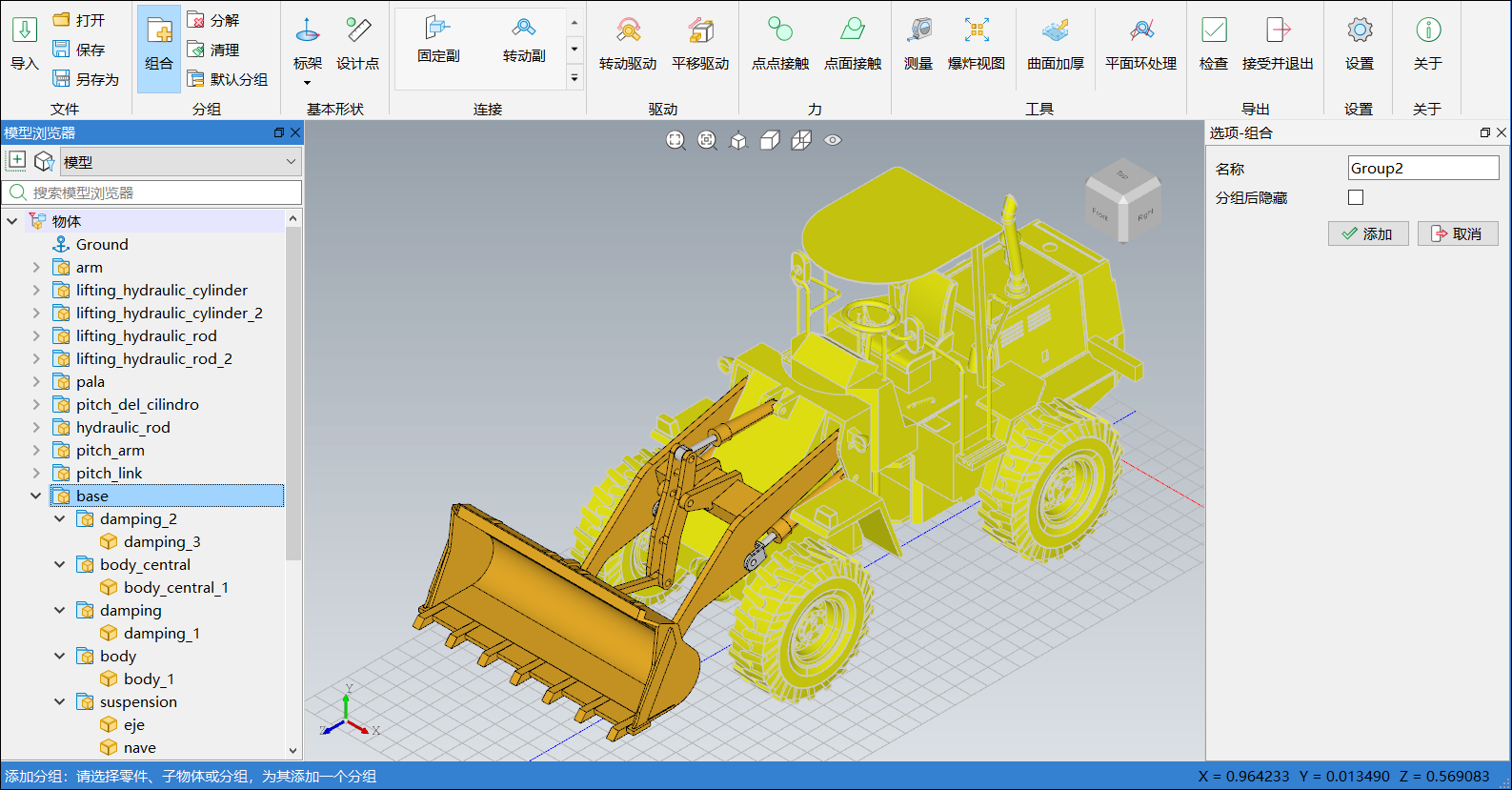
单击取消,或者按 Esc 键,或者再次单击菜单栏中的组合,退出分组状态;
在模型浏览器中选中模型后,通过鼠标左键拖拽节点,将升降液压缸
lifting_hydraulic_cylinder_2拖到lifting_hydraulic_cylinder组中;将升降液压杆lifting_hydraulic_rod_2拖到lifting_hydraulic_rod组中,即将两个升降液压缸进行合并简化。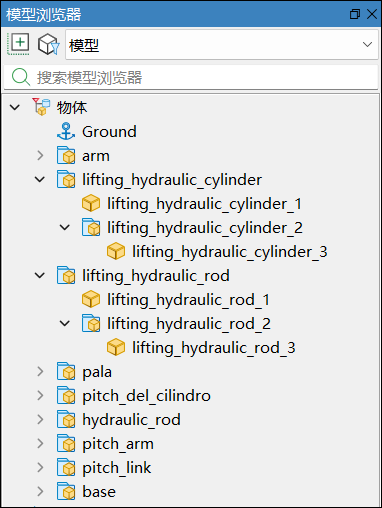
# 添加连接和驱动
在车身上任意位置添加一个固定副
Fixed1,零件二选择Ground,将模型的base分组与大地固定;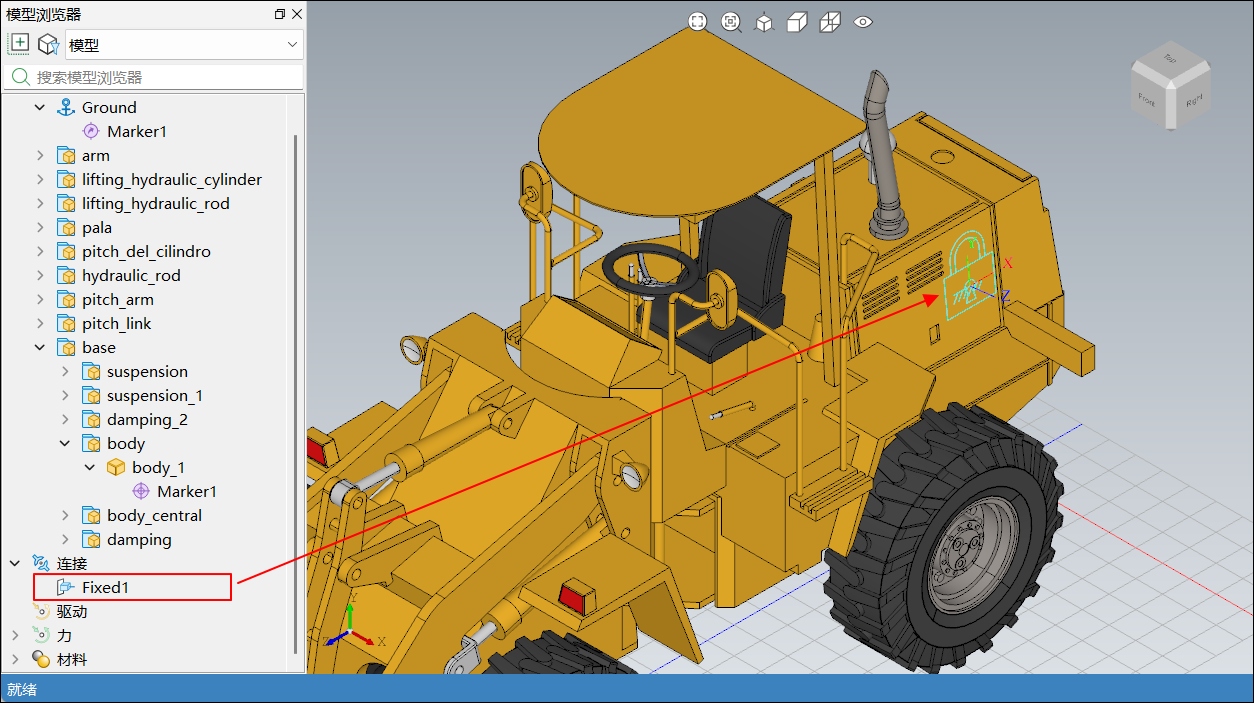
在模型树中,选中分组
base下除body_central_1之外的所有分组,右击,在弹出的上下文菜单中选择隐藏选中实体,将选择的零件隐藏,便于添加连接;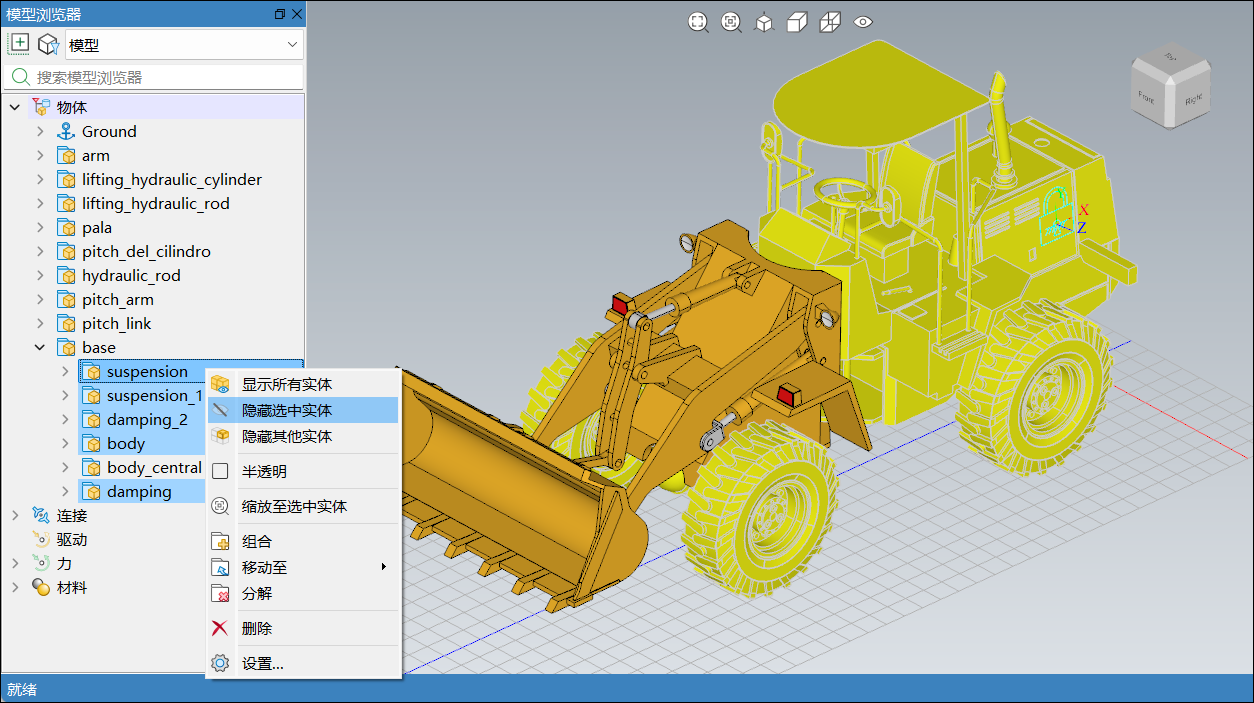
在零件
pitch_del_cilindro_1与零件body_central_1的连接处添加一个转动副Revolute1;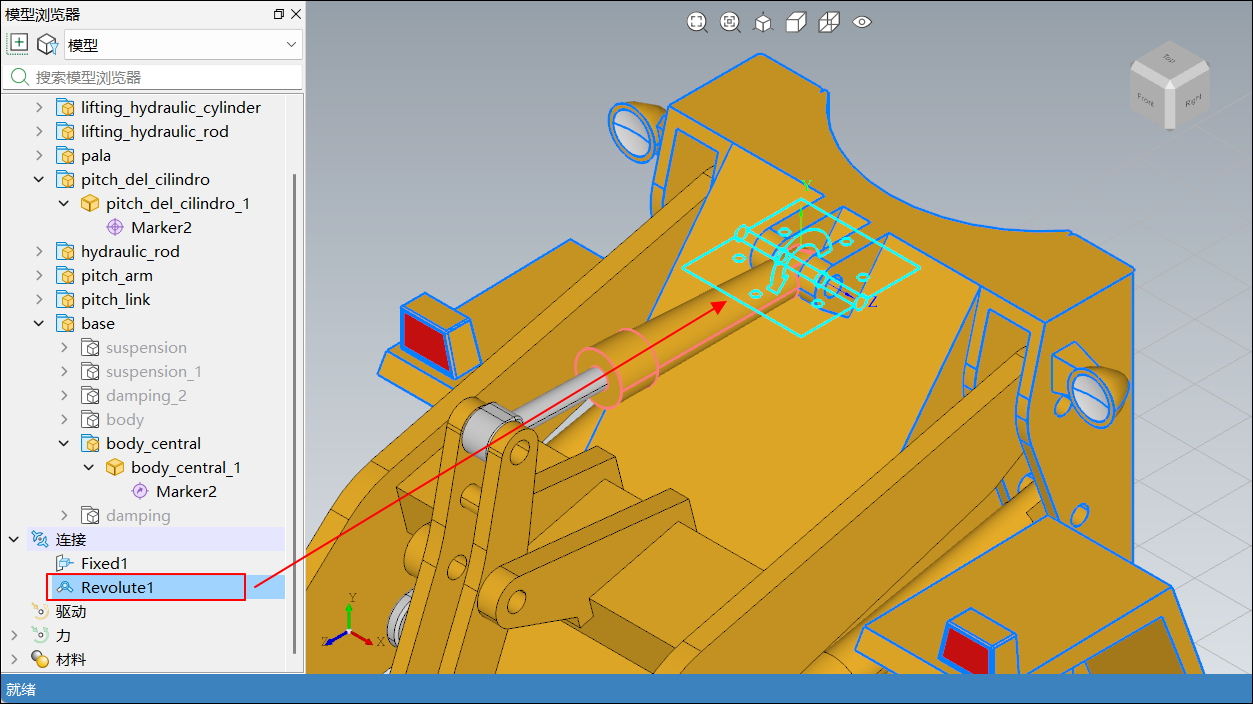
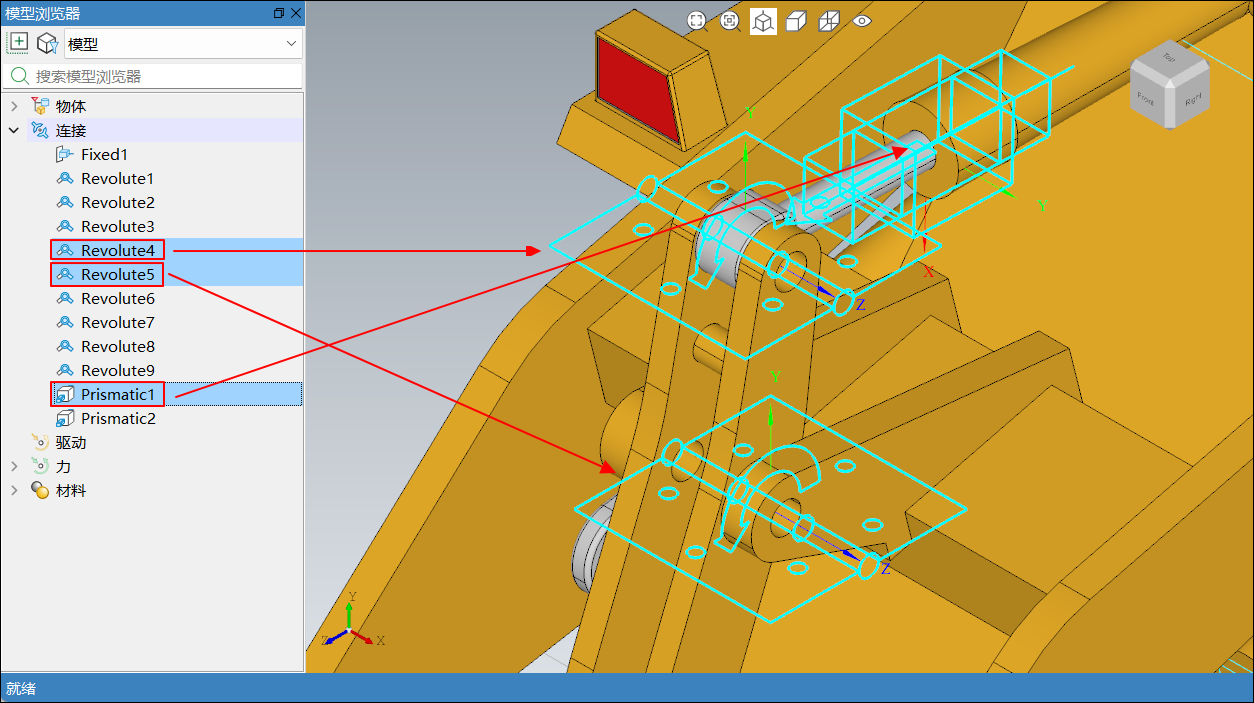
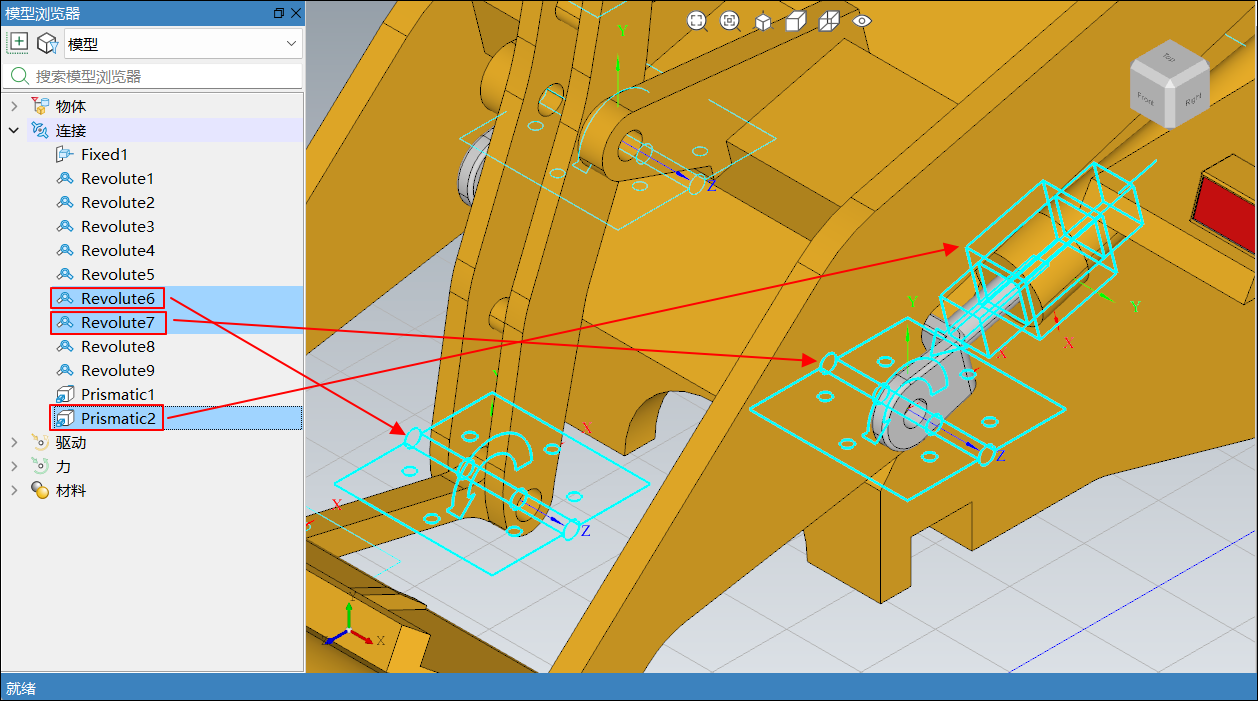
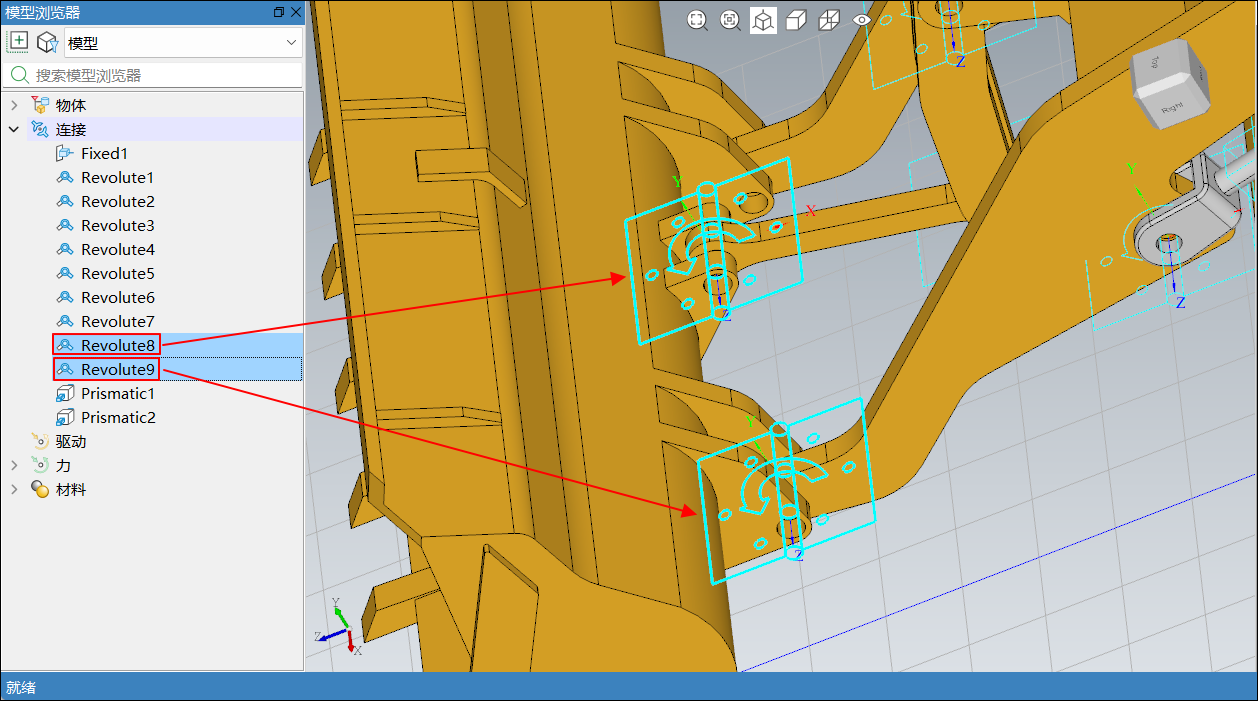
根据下表中的信息,将其它连接按照图示位置添加完毕;
连接名称 连接类型 零件1 零件2 Revolute2 转动副 arm_1 body_central_1 Revolute3 转动副 lifting_hydraulic_cylinder_1 body_central_1 Revolute4 转动副 hydraulic_rod_1 pitch_arm_1 Revolute5 转动副 arm_1 pitch_arm_1 Revolute6 转动副 pitch_link_1 pitch_arm_1 Revolute7 转动副 lifting_hydraulic_rod_1 arm_1 Revolute8 转动副 pitch_link_1 pala_1 Revolute9 转动副 arm_1 pala_1 Prismatic1 平移副 hydraulic_rod_1 pitch_del_cilindro_1 Prismatic2 平移副 lifting_hydraulic_rod_1 lifting_hydraulic_cylinder_1 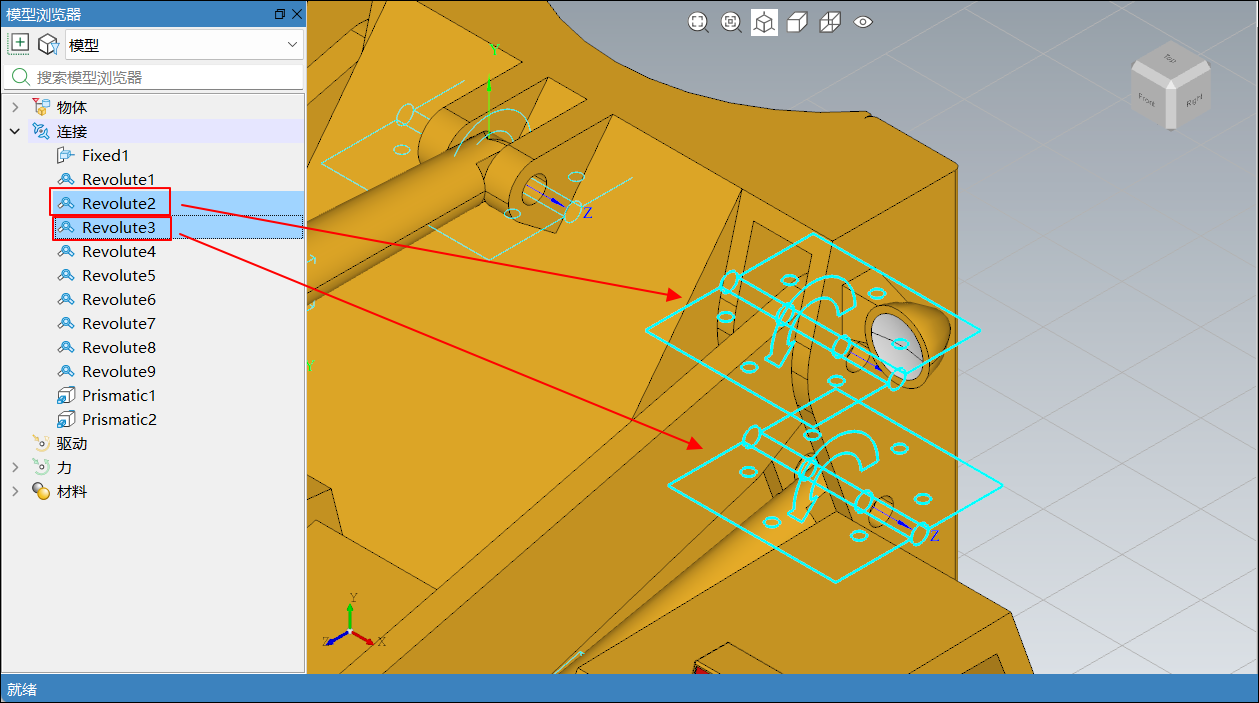
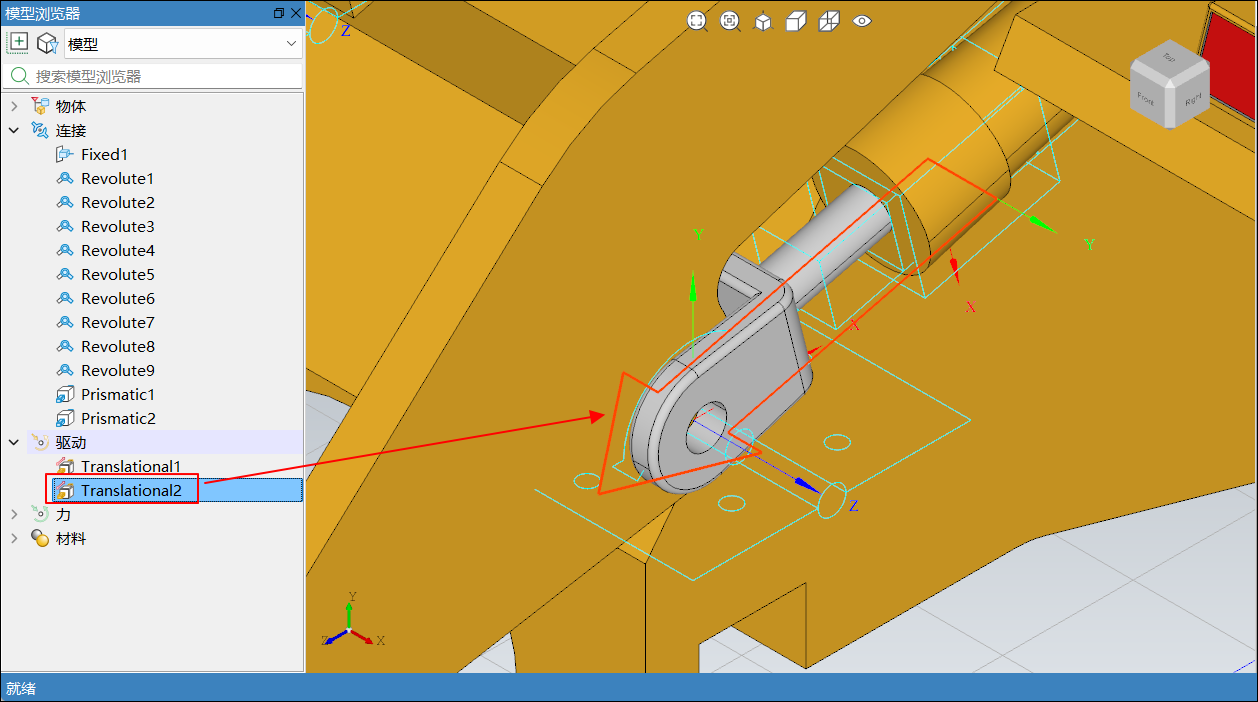
连接添加完毕后,按 Esc 键,退出添加连接状态,然后按照下表中的信息,在对应运动副上添加驱动;
驱动名称 驱动类型 对应连接 Translational1 平移驱动 Prismatic1 Translational2 平移驱动 Prismatic2 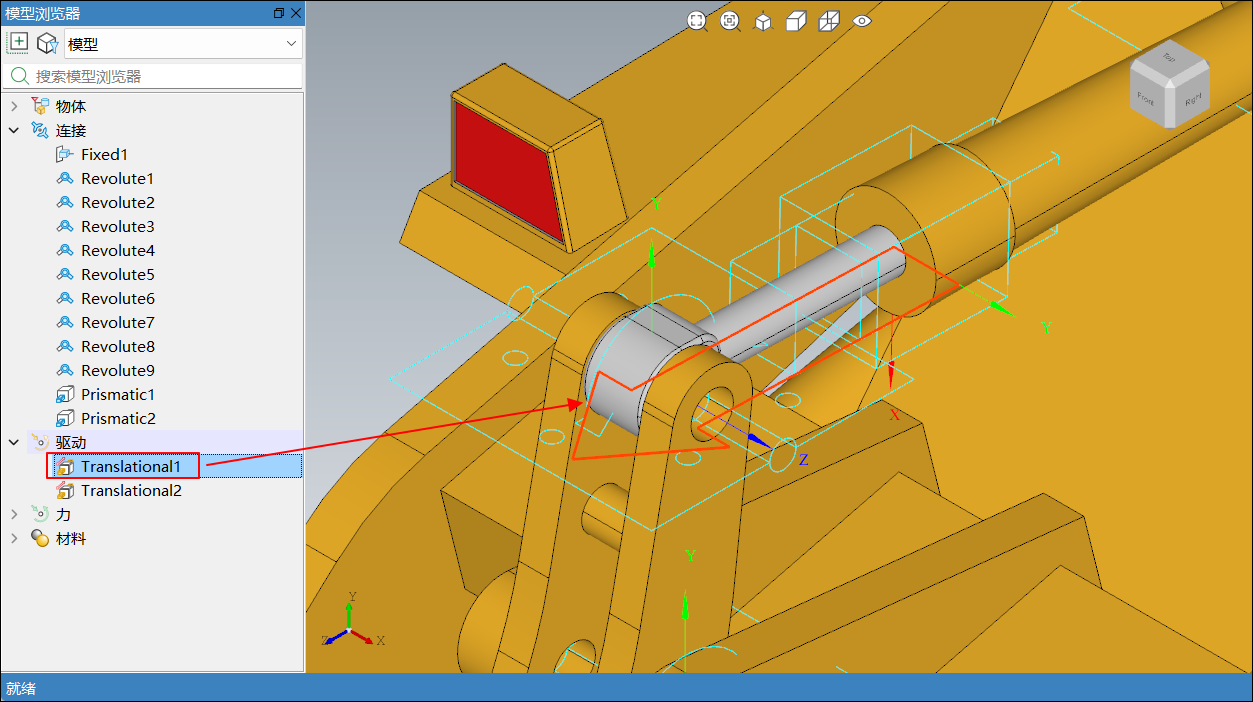
驱动添加完毕后,在模型浏览器或三维视图中选中驱动,在右侧弹出的属性-平移驱动侧边栏中,修改驱动类型为位移,
Translational1和Translational2都需要修改;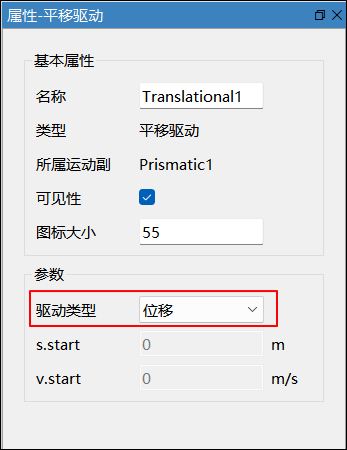
按 Esc 键,退出添加驱动状态。
# 生成 Modelica 模型
完成分组、添加连接和添加驱动等多体设计后,即可将其转换为 Sysplorer 支持的 Modelica 多体模型,进行后续的多体建模操作。
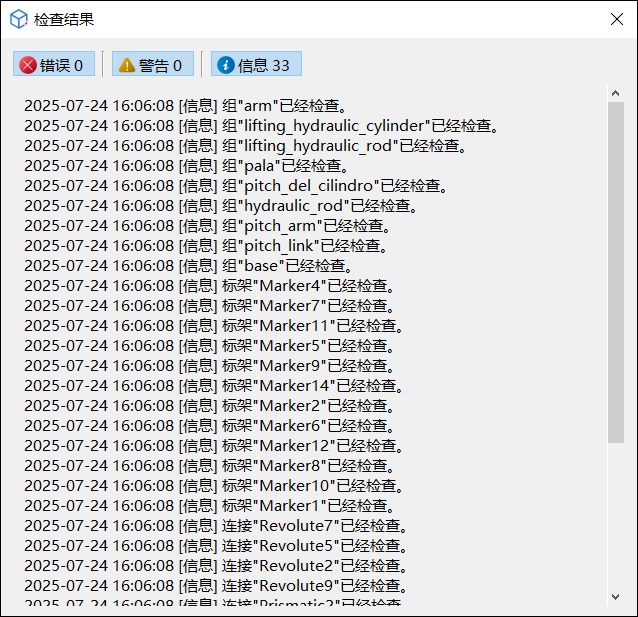
单击菜单栏中的检查按钮,检查是否存在待处理的警告或错误;
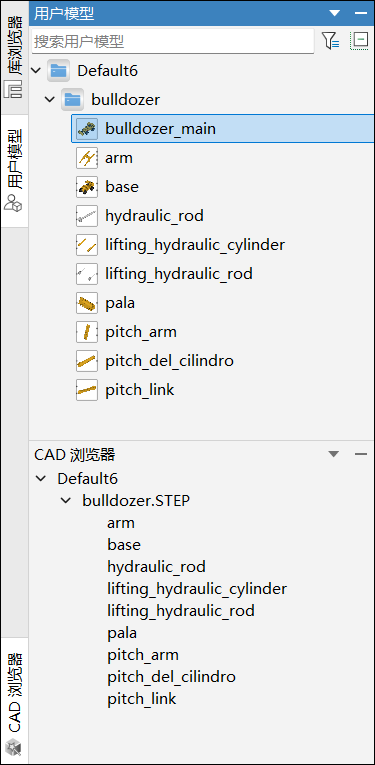
单击菜单栏中的接受并退出,将在 Sysplorer 平台中生成对应的用户模型,同时 CAD 浏览器中新增了工程 CAD 文件目录。
# 打开铲运机铲斗机构模型
打开模型
bulldozer_main,将原自动生成的驱动输入信号组件替换为 Modelica.Blocks.Sources.TimeTable 组件;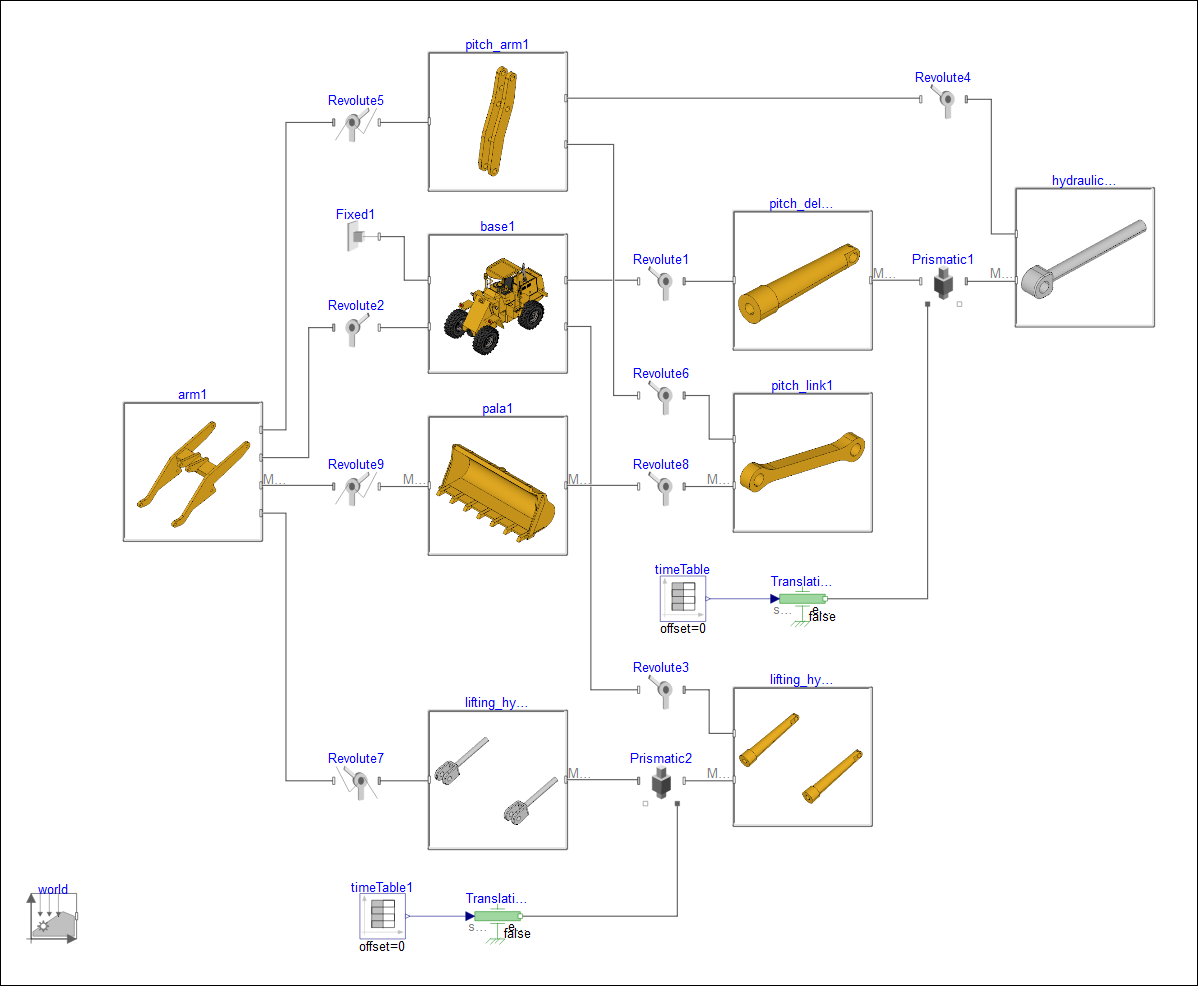
对加入的信号组件参数进行设置。
参数值设置如下:
① timetable
table:[0, 0; 1, 0.03; 2, -0.03; 4, -0.01; 5, 0.06]
② timetable1
startTime:2 table:[0, 0; 2, -0.1; 3, -0.1]
# 仿真及结果查看
单击主页 > 仿真设置,将仿真区间中的终止时间设置为
5,单击确定并保存到模型;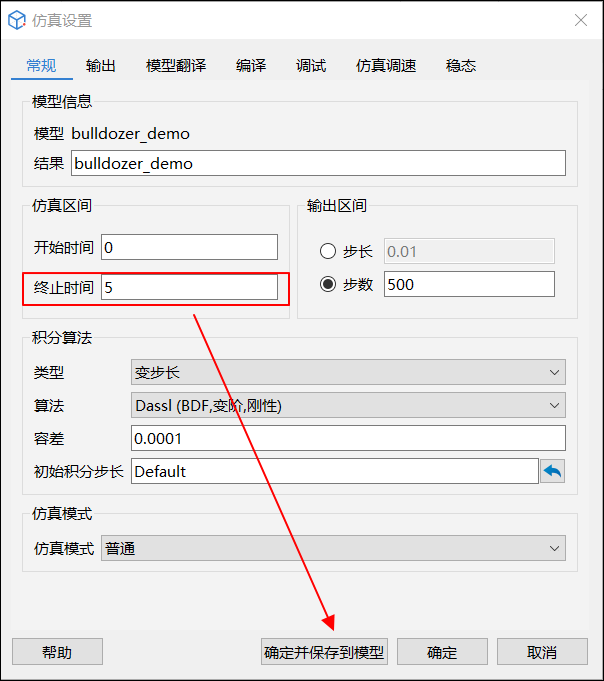
单击主页 > 仿真,等待系统响应完毕,Sysplorer 平台自动跳转至结果查看器页面,单击仿真 > 动画,弹出动画窗口,单击播放,即可看到铲运机铲斗的后处理动画;
应用案例获取。
- 获取工程压缩包,右击->弹出上下文菜单->将链接另存为:bulldozer_demo.zip;
- 解压
bulldozer_demo.zip; - 在 Sysplorer 中打开解压目录下的
package.mo。