# 柔性体模型库
# 概述
TYFlexBody 柔性体模型库包括柔性体、模态梁、读取 Mnf 文件信息组件等模型,适用于部分变形不可忽略构件的多体动力学系统的建立。该库可用于航空航天、车辆船舶、工程机械等领域,支持用户在刚柔耦合系统中的方案设计、系统集成阶段的动态特性仿真分析,模拟其中柔性体的物理特性,典型的应用场景包括:工程机械混凝土泵车臂架刚柔耦合仿真、航天器卫星帆板刚柔耦合仿真、车辆动力学刚柔耦合仿真、航空起落架刚柔耦合仿真、机器人运动控制刚柔耦合仿真。
# 功能要点
适用多场景、多工况的建模与仿真
基于有限元软件的 Mnf 文件,能够对各种构型的柔性体进行描述,如梁、板、复杂几何体等,以及分布力功能和预载荷功能的添加,能够适用于多场景、多工况的刚柔耦合系统建模与仿真,如曲柄滑块机构、卫星帆板、航空起落架等。
支持多种变形应力应变计算
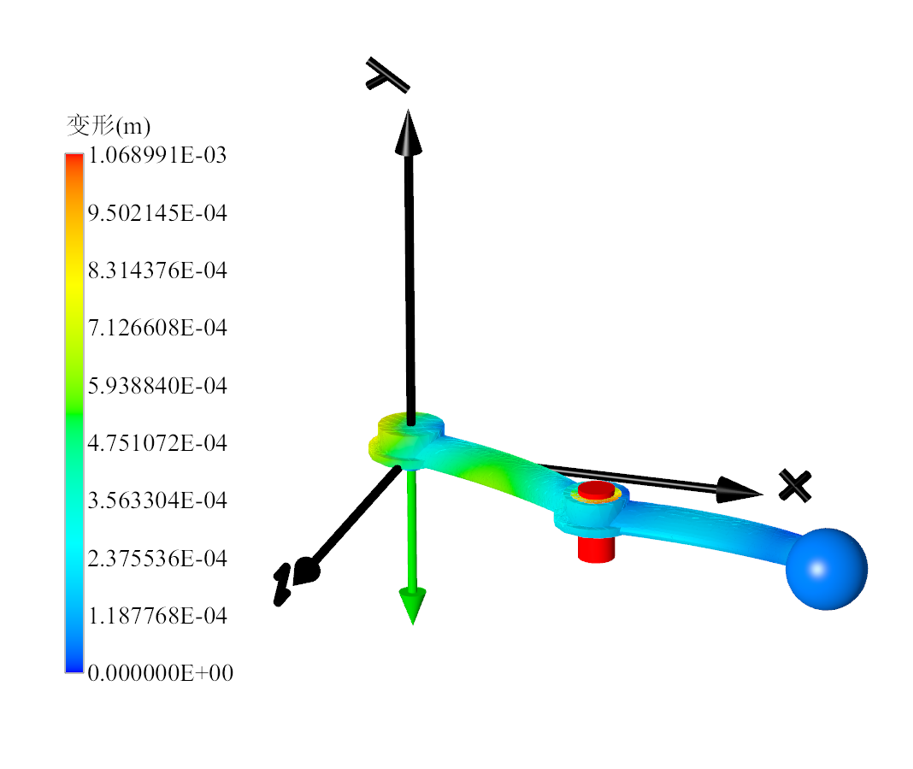
涵盖变形,最大主应力、等效应力、最大剪切应力等 10 种应力,以及主应变、等效应变、最大剪切应变等 10 种应变的计算,覆盖对材料刚度和强度评估的要求,帮助用户实现系统的快速设计和验证。
提供丰富的后处理动画
通过云图等方式,展示上述计算得到的变形、应力和应变等场变量的动画效果,提供丰富的后处理功能。这种可视化表达方式使用户能够直观地观察结果,并更好地理解柔性体模型在不同加载和边界条件下的行为,有助于用户做出更好的决策和优化设计过程。
# 模型库目录
TYFlexBody 柔性体模型库提供了模态梁,基于 Mnf 文件的通用柔性体,以及用于可视化 Mnf 文件包含参数的两个实用组件,结合多体系统模型库,采用搭积木和连线的模块化建模方式,易于快速实现刚柔耦合系统中的柔性体的开发和复杂系统模型的仿真分析。
| 名称 | 描述 | ||
|---|---|---|---|
| UsersGuide | 用户指南 | 提供模型库概述、联系方式、版本说明等介绍文档 | |
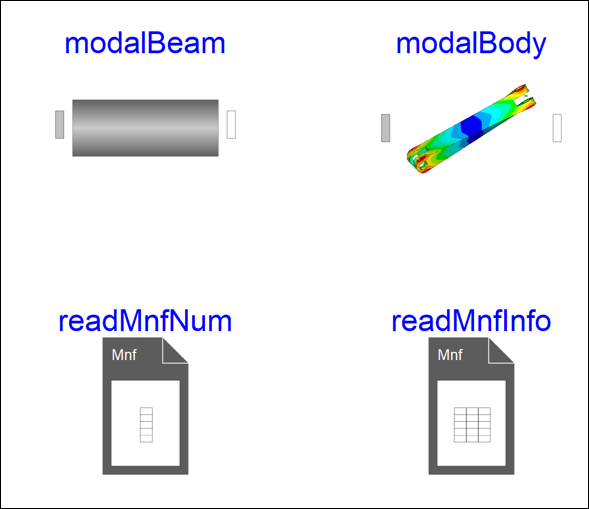
| ModalBeam | 模态梁 | 利用简化的梁模型,将梁分为多个单元并使用局部基函数对梁的变形场进行描述。此模型只需要设定梁的几何参数和材料参数即可在刚柔耦合模型中使用,简化了建模难度,同时提供细腻的后处理动画 | |
| ModalBody | 柔性体 | 该模型用于创建通用柔性体,适用于多体系统中变形不可忽略构件的建立。具体过程为:利用其他有限元软件(如 MSC.Nastran、ANSYS、ABAQUS 等)将构件离散成细小的网格,再进行模态分析,将计算结果保存为模态中性文件(Modal Neutral File,MNF 文件),随后将 MNF 文件放在柔性体库指定的路径下进行读取,将其放入多刚体模型下中代替相应位置下的刚体模型,实现刚柔耦合分析 | |
| Utilities | 实用组件 | 读取 Mnf 文件信息数组长度 | 利用外部 C 函数读取 Mnf 文件,首先读出柔性体的模态阶数、节点个数、应力节点个数、应变节点个数等参数,方便设置后续更多参数的数组长度。 |
| 读取 Mnf 文件信息 | 利用外部 C 函数读取 Mnf 文件的具体信息,例如柔性体质量、惯量、质心位置、模态力、模态振型、惯性不变量矩阵等参数。 | ||
| Interfaces | 接口库 | 提供标准的机械多体接口,便于与机械多体模型库配合使用。 | |
# 主要模型
# 应用场景
机械臂柔性体建模
柔性体机械臂是一种利用柔性材料和结构实现运动控制的机械臂系统。它通常由多段柔性杆或刚性杆组成,这些柔性杆可以在机械臂的运动过程中发生形变和弯曲,实现复杂的运动和操作。
集装箱箱体柔性体建模
集装箱箱体的柔性体建模是将集装箱箱体视为柔性结构,考虑其在静力学和动力学分析中表现出的弹性特性。在静力学分析中,可以计算箱体在不同工况条件下的应力和变形情况,以评估其结构的稳定性和安全性。在动力学分析中,可以研究箱体在振动和冲击加载下的响应,从而确定其动态行为和抗震性能。这种柔性体建模方法有助于更全面地理解和优化集装箱箱体的设计和使用。
发射架主体部分柔性体建模
发射架是用于支撑和发射火箭或导弹的重要设备,其在发射过程中会承受来自回转轴、油缸支撑点和负载安装点处力的作用,从而导致形变。为了准确模拟这些形变,考虑构建发射架的柔性体模型,得到发射架在不同工况下的形变情况。这些结果可以用于评估发射架结构的稳定性和安全性,并为设计和优化提供参考,提高其工作性能和可靠性。
刚柔耦合多体系统示教培训
利用柔性体模型库可以模拟多体系统在大范围运动的同时表现出的变形和可计算应力应变的特性,开阔视野、培养创新思维和专业意识。
# 应用案例
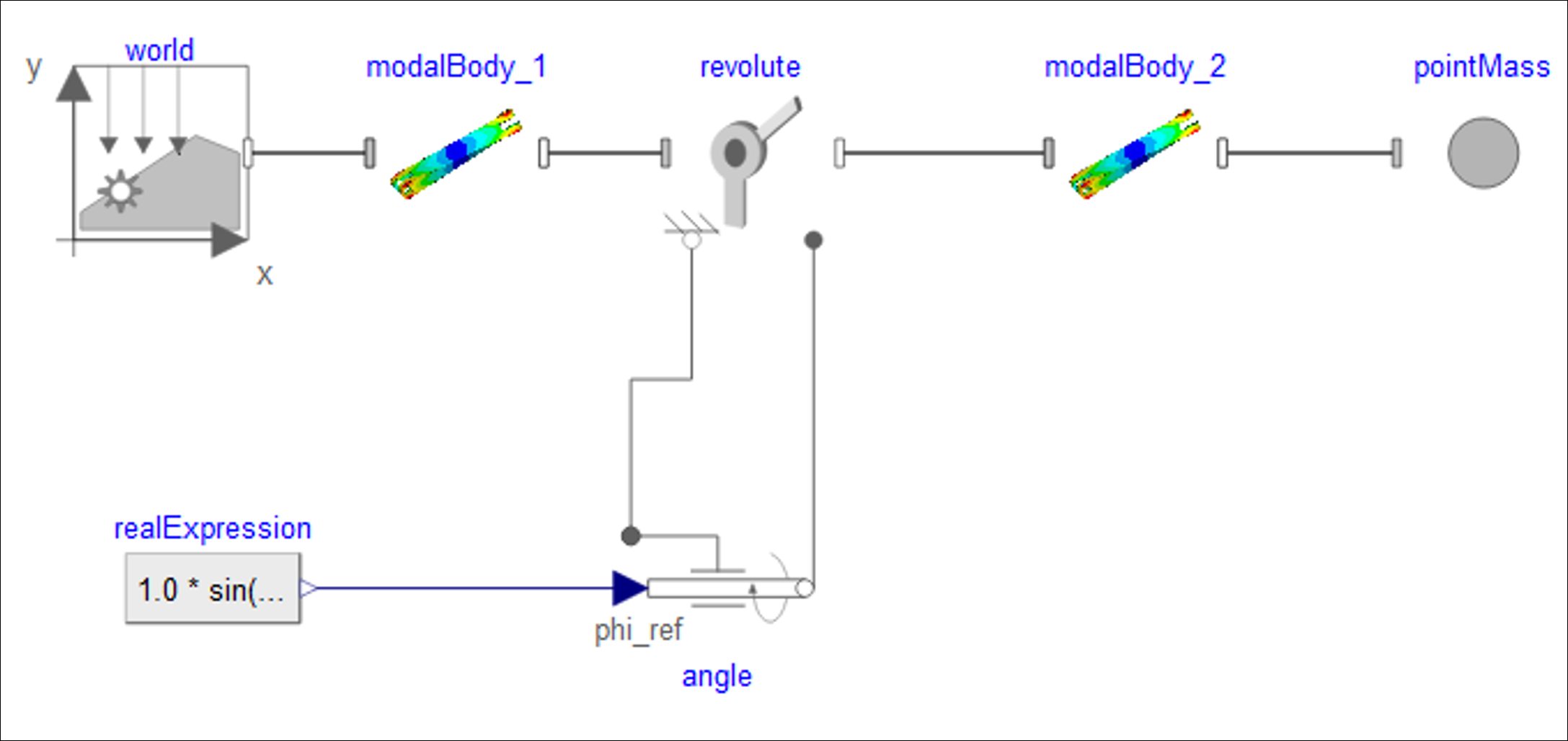
柔性体机械臂是一种利用柔性材料和结构实现运动和操作的机械臂系统。柔性体机械臂的特点是具有高度的柔性和可塑性,可以适应不同的工作环境和工作任务。与传统的刚性机械臂相比,柔性体机械臂更适合处理复杂的、不规则的工件或者在狭小、难以到达的空间内进行操作。柔性体机械臂还具有较好的安全性和人机协作性,在与人类共同工作时能够减少意外伤害的发生。它通常由多段柔性杆或刚性杆组成,这些柔性杆可以在机械臂的运动过程中发生形变和弯曲,实现复杂的运动和操作。
系统模型:
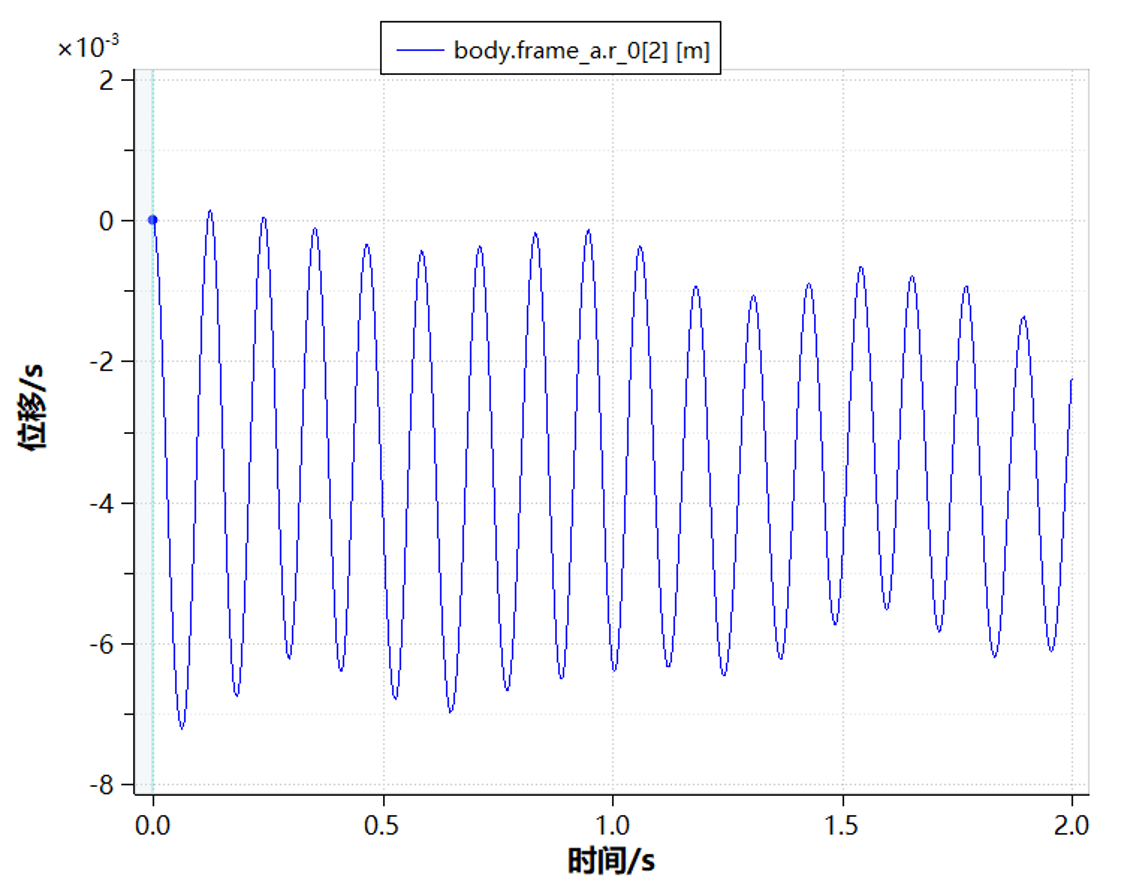
末端物体质心 y 方向振动位移:
后处理云图显示: