# Sysplorer 与 Simulink 环境差异说明
本章节面向 Simulink 环境迁移用户,介绍从 Sysplorer/Sysblock 与 Simscape/Simuilnk 在基础能力方面的异同,帮助用户快速建立起对 Sysplorer 环境的直观认识。
# 基础概念说明
# 物理建模
物理建模是将物理现象或系统转化为数学模型的过程,即利用物理定律和数学方法,建立数学模型来描述和模拟实际物理系统的行为和特性,如机械系统、电气系统、热力学系统等。这个过程通过简化和抽象物理过程,并运用数学工具(如微分方程、线性代数等)来刻画系统的各个方面。通过求解和分析模型,获得定量结果,为科学研究、工程设计和优化决策提供理论依据和实践指导。
# 与 Simulink 建模的联系
Simulink/Simscape 采用物理网络法,通过模块化封装物理元件(如电机、阀门)并以图形化连接模块端口来构建能量守恒拓扑,底层基于微分-代数方程自动生成,适合中小规模系统和控制算法联合仿真。相比之下,Sysplorer 基于 Modelica 语言,支持声明式方程的非因果建模,可反映系统实际物理拓扑,支持多领域统一建模,也可以从 CAD 模型一键生成参数化物理模型,并自动推导约束方程,特别适合复杂机械系统和多相流系统的高保真建模。
在多域协同与代码生成方面,Simscape 依赖领域专用工具箱,跨域耦合需通过 Simulink 信号接口桥接,生成的代码适用于离线仿真和嵌入式系统,但混合模型需分路径处理,实时性受限。 Sysplorer 则内置统一的多域建模框架,支持直接耦合不同领域的物理端口,无需信号转换,并通过 AI 驱动的模型降阶技术提升复杂系统的实时性能。
# 框图建模
框图建模是一种图形化建模方法,通过功能块(Block) 和连接线(Line) 表示系统的组成及其信号流动关系,广泛应用于动态系统的设计与仿真,例如控制系统、信号处理等。
- 功能块(Block):表示系统中的一个功能单元,例如运算、输入或输出模块;
- 连接线(Line):表示信号的传递路径,定义了数据流的方向;
- 应用场景:框图建模能够直观地呈现动态系统的行为,适用于工程仿真和系统仿真。
# 与 Simulink 建模的联系
Sysblock 和 Simulink 在框图建模的概念上高度一致,均通过图形化的方式表示动态系统,利用功能块和连接线描述系统的组成和信号流动关系。两者都基于系统理论,将复杂系统分解为模块化的功能单元(如输入、运算、输出),通过信号流反映系统的动态行为,适用于控制系统、信号处理等工程领域的仿真和验证。
框图建模的核心思想在于直观地呈现系统的输入-处理-输出过程,支持用户从概念层面理解系统逻辑,这一理念在 Sysblock 和 Simulink 中是共通的。
# 状态机建模
状态机建模是一种用于描述系统行为的建模方法,通过定义系统的状态和状态之间的转换来表示系统的逻辑流程,特别适合事件驱动的离散系统。状态机以有限数量的状态为核心,清晰地展示系统如何响应外部事件或条件变化,常用于控制系统、协议设计和自动化流程等领域。
- 状态(State):系统在某一时刻所处的特定模式或条件;
- 转换(Transition):系统从一个状态切换到另一个状态的过程;
- 应用场景:状态机建模适用于需要明确逻辑控制的场景,例如电梯运行、设备开关或软件工作流。
# 与 Simulink 建模的联系
Sysblock 和 Simulink/Stateflow 在状态机建模的概念上高度一致,均基于有限状态机理论,通过状态、转换和事件来表示系统的逻辑行为,适用于事件驱动的设计与验证。两者都支持状态(State)表示系统模式、转换(Transition)定义状态状态切换条件、事件(Event)触发转换,以及动作(Action)执行特定操作。核心思想是通过状态图清晰地描述系统如何响应外部条件或事件。
例如在自动门系统中,Sysblock 和 Stateflow 都可以定义“关闭”和“开启”状态,并通过“有人靠近”事件触发状态切换,体现状态机建模的通用性。
# 三种模型的联系与选择
- 联系:三种模型都用于系统仿真,可以结合使用。例如,框图模型处理控制算法,状态机模型管理运行模式,物理模型模拟真实部件。
- 选择建议:
- 需要模拟真实物理行为:选择物理模型(如汽车悬挂);
- 需要设计控制系统:选择框图模型(如温度控制);
- 需要定义逻辑流程:选择状态机模型(如自动门控制)。
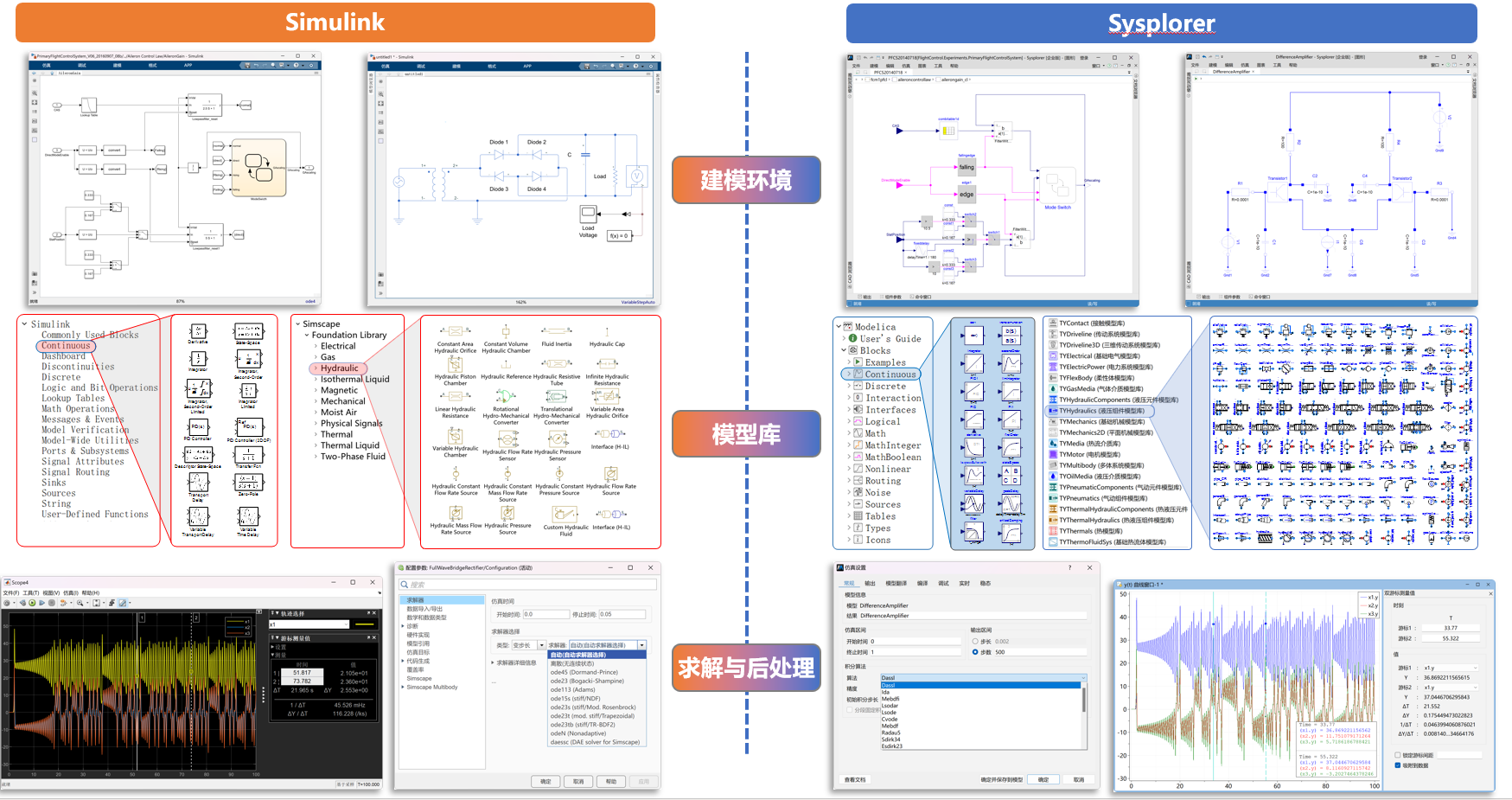
# 建模环境
在现代工程设计与系统开发中,选择合适的建模与仿真工具对项目的成功至关重要。尤其是在控制系统、嵌入式系统及多物理场景下的建模,如何高效地进行建模、仿真、代码生成并最终实现硬件部署,往往决定了产品的开发周期和质量。
本章节旨在通过基础环境、建模与仿真环境、嵌入式代码生成和平台能力等四个层次,分析 Sysblock 和 Simulink 在核心功能上的异同,帮助工程师和开发者在具体应用场景中做出明智的选择。
注意
在与 Simulink 环境的差异说明中,主要关注的是建模和仿真环境、代码生成等本体功能,而非全面的功能覆盖,例如不涉及外部工具箱(如功能安全工具、 AI 工具等)的比较。
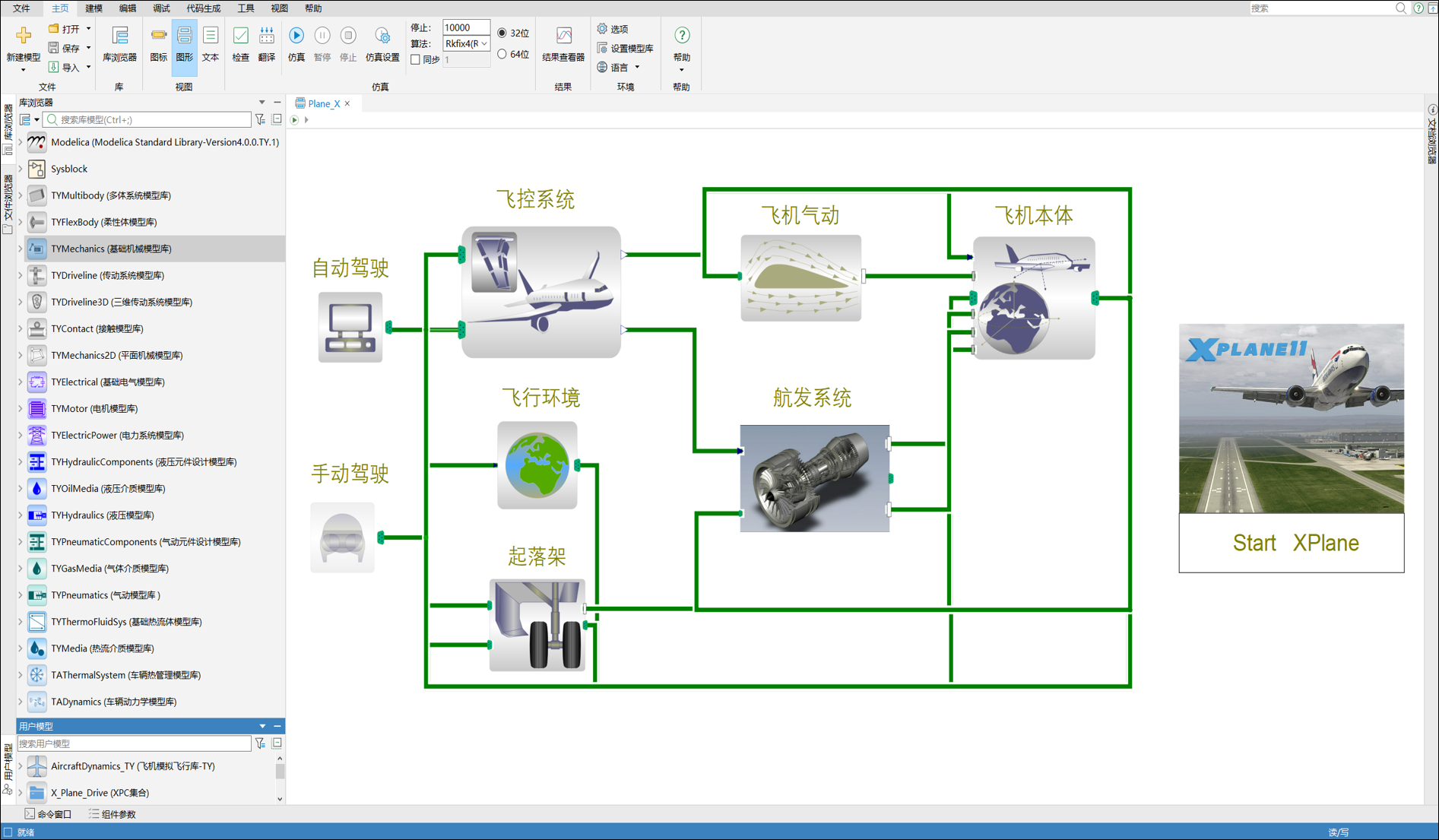
Sysplorer 是面向多领域工业产品的系统建模与仿真验证环境,基于 Modelica 统一建模标准,在一个环境中支持物理建模、框图建模和状态机建模。Sysplorer 目前的建模范式可以分为两类:
Sysplorer 建模:此建模范式是基于方程的,主要面向多领域物理对象。此功能可对标 Simulink 中的 Simscape 建模功能。
Sysblock 建模:此建模范式是基于过程的,提供了可视化的框图建模和状态机建模能力。此功能可对标 Simulink 框图建模和 StateFlow 建模功能。
用户该选择 Sysplorer 物理建模环境还是 Sysblock 框图及状态机建模环境主要需要考虑:① 建模对象,② 模型用途,③ 代码生成等三个方面。
除了本地的建模与代码生成功能,Sysblock 还提供了对 Simulink 模型导入的支持,使得用户可以轻松地将现有的 Simulink 模型导入到 Sysblock 中进行继续开发。通过这一功能, Sysblock 能够实现对 Simulink 模型的转化,支持开发者在 Sysblock 平台上进行后续的代码生成和硬件部署,从而确保用户可以平滑地过渡到 Sysblock 环境,而无需从而从头开始重新建模。
# Sysplorer 建模环境说明
Sysplorer 物理建模是以物理实体和真实特性为核心,基于物理定律(如牛顿力学、电磁学、热力学)建立精确模型,描述组件的几何结构、材料属性和物理行为。适用于模拟各类物理对象(如机电液热控等多领域耦合系统)。如果用户建模是用于仿真和分析,生成代码的目的也是做实物或半实物验证,对生成代码的可读性要求不高,不直接生成产品级代码,那么推荐采用物理建模。
Sysplorer 建模环境提供文本、图标、图形等视图,支持不同形式的 Modelica 建模手段,并提供本地模型(库)管理功能。
为增强复杂系统建模的友好性及可视化,可视化建模将主要表征为拖放式建模。可视化建模支持基于组件连接图的托放式建模,包括无向连接的物理建模和有向连接的信号框图建模。而且模型与实际物理系统拓扑结构一致,更加直观,易于验证模型是否符合设计者意图。
Sysplorer 建模环境为国产化产品,具有高度的自主性,并且从页面设计、参数面板显示及帮助文档等多方面相对于 Simulink 建模环境更符合国内用户的使用习惯,其次 Sysplorer 支持多领域统一建模,避免多工具切换。
# Sysblock建模环境说明
Sysblock 是框图与状态机建模环境,提供模块图建模、仿真与代码生成功能,可用于动态系统和控制算法设计。Sysblock 基于 Modelica 规范,并与物理建模环境无缝集成,在自主可控开发需求下更具优势,逐步成为控制建模领域的新选择。
Sysblock 在系统建模、仿真和代码生成功能以及软件使用习惯方面跟 Simulink 非常类似,熟悉 Simulink 的用户可以快速上手 Sysblock。但 Sysblock 不是 Simulink 的 1 比 1 复制,包括模型表达、仿真原理、内置模块库以及跟 M 脚本互调用等方面有显著区别,Simulink 用户在初步上手 Sysblock 时有必要了解这些差异,以便更快熟悉 Sysblock 的应用。
# 与 Simulink 环境差异说明
# 基础环境
在现代工程建模和仿真领域,Sysblock 与 Simulink 虽然在建模和仿真方面都具备强大的功能,但它们在底层实现、语言基础以及特定功能上的差异决定了两者的使用场景和优劣势。 Sysplorer 与 Sysblock 统一使用 Modelica 语言描述,在 Simulink 中分别对应使用 Simscape 与 xml 描述。
特别是,Sysblock 基于 Modelica 建模规范和图形化建模环境,而 Simulink 基于 MATLAB 脚本语言和图形化建模框架,这使得两者虽然在某些功能上相互替代,但在具体应用和实现上存在显著差异。
# 模型格式
MWORKS 平台模型使用.mo文件格式,而 Simulink 使用.slx和.mdl格式,双方无法直接兼容打开,需要导入转换或手动搭建等效模型。
- Modelica
.mo文件格式
.mo是 Modelica 的源代码文件格式,用于存储用 Modelica 语言编写的模型代码。每个.mo文件通常包含一个或多个 Modelica 类的定义(如模型、组件、函数、类型等)。
- Simulink
.slx和.mdl文件格式
.slx和.mdl是 Simulink 使用的模型文件格式。.mdl是较旧的文件格式,而.slx是新版本的格式,基于压缩存档(ZIP)的结构,可以包含更多信息,如模型的元数据、仿真结果等。
特性对比
特性 Modelica .mo文件Simulink .mdl/.slx文件文件格式 .mo(纯文本文件).mdl(文本结构)或.slx(二进制压缩文件)文件内容 Modelica 代码定义的方程、类、参数等 与图形元素一一对应的文本信息 存储模型的图形信息、块定义、信号连接等 建模方式 基于方程和物理建模,模型通过代码定义 基于图形化建模,模型通过拖拽块和连接信号定义 扩展性 高度模块化,支持继承和重用 通过自定义块和工具箱拓展,依赖 Simulink 环境 文件大小 较小(纯文本) .mdl文件较大,.slx更小(压缩格式)图形化支持 图形化建模,并与模型文本完全映射 提供图形化建模环境
# 基础模块库
Sysplorer模块库
Sysplorer 模块库已覆盖 Simscape 基础模块库的绝大部分模型,统计如下:
分类 模块库 Sysplorer 模块库 Simscape 模块库 专业 机械 模块:基础机械、平面机械、机械多体,一三维传动、柔性体和接触模型库
功能:支持机械传动系统设计、多体耦合仿真、接触碰撞模拟、柔性部件分析及机器人/机床验证等模块:包含机械、基于位置的机械平移、传动系统和多体模型库
功能:对旋转、平移机械和多体系统进行建模和仿真流体 模块:包含液压、热液压、气动、基础热流体、空气处理与通风、气体介质和热流介质模型库
功能:聚焦液压回路、气动回路、管网、热流及各类暖通系统的设计与验证分析,可覆盖航空、航天、车辆、船舶、工程机械、轨道交通、核能、火电、暖通等多个领域模块:包含等温流体模型、热流体模型、两相流体模型、气体模型、湿空气模型和热模型库
功能:可用于开发前装式装载机液压系统、动力转向系统和起落架作动系统等流体动力装置。同时支持构建发动机冷却系统、变速箱润滑系统和燃油供给系统电气 模块:包含基础电气、电机、电力系统和燃料电池模型库
功能:支持电力电子电路、电机系统、电力系统的设计与验证分析,为航空、航天、能源等多行业电气系统研发提供有力支撑模块:包含电气模型和电磁模型库
功能:支持电气元件、电气传感器、电源、集成电路、被动元件、半导体和转换器、传感器、开关和断路器、电力电子行业 能源 模块:包含综合能源系统、风力发电和光伏发电模型库
功能:聚焦源网荷储、风电、光伏系统数字化设计与仿真,如风电、光伏 MPPT 控制与并网控制设计优化,也可协同构建风光热储系统,支撑新型电力系统、工业园区多能互补等场景模拟模块:包含可再生能源模块,如光伏阵列、风力涡轮、燃料电池、超级电容
功能:使用风力涡轮和光伏阵列对可再生能源进行建模车辆 模块:包含车辆动力学、动力性经济性、热管理、电子、电池和发动机模型库
功能:支持车辆整车底盘、传动系统、热管理系统、电气系统的设计与验证分析,贯通车辆系统架构设计、零部件选型与虚拟集成、整车虚拟验证、控制策略验证等多个阶段,满足多种整车系统仿真场景需求模块:需要通过跨库组合建模的方式实现(如 Simscape Multibody、Simscape Electrical、Simscape Fluids)构建
功能:支持车辆动力学、车辆热管理、车辆动力性经济性、HIL 测试(对接 dSPACE/VT 等硬件设备)制造 模块:包含卷料处理模型库
功能:用于卷料处理和运输过程模拟、仿真和优化,广泛应用于造纸、印刷、包装加工、柔性电子封装等工业生产制造领域暂不支持 以上仅针对 Simscape 基础模块库对比,暂不涉及拓展工具箱模块;关于各模块组件的详细信息,请参阅各模块的帮助文档页面。
Sysblock模块库
Sysblock 模块库已覆盖 Simulink 基础模块库的绝大部分功能,因底层实现机制和开发周期的原因,部分功能无法等效替代,统计如下:
Sysblock模块库分类 对标Simulink分类 功能说明 Continuous Continuous 连续系统模块,如 Integrator、Transfer Fnc,用于建模连续时间动态系统。 Discrete Discrete 离散系统建模模块,如 Discrete Transfer Fcn、Unit Delay、Zero-Order Hold 等。 Discontinuities Discontinuities 表达不连续函数或逻辑,如 Saturation、Dead Zone、Relay、Switch 等。 LogicAndBitOperation Logic And Bit Operations 逻辑门模块(AND、OR)、位运算模块,与控制系统或执行条件相关。 LookupTable Looup Tables 支持一维/二维查表功能,常用于系统非线性特性建模或简化控制逻辑实现。 MathOperation Math Operations 基本数学函数模块,如加减乘除、乘方、开方、绝对值、三角函数等。 Port Ports & SubSystems 输入输出端口定义,模块封装所需的接口配置。 SubSystems Ports & SubSystems 封装子系统,支持模块化建模、层级结构构建。 SignalAttributes Signal Attributes 修改信号属性,如宽度、数据类型、维度、采样率等,便于信号统一管理。 SignalRouting Signal Routing 信号连接与控制,如 Bus Crator、Mux、Switch、Merge 等,增强信号通路灵活性。 Sources Sources 提供信号源,如 Constant、Step、Sine Wave、Random 等。 Utilities Sinks 工具类模块,包括 To Workspace、CCaller 等实用功能。 FlipFlops Extras/Flip Flops 触发器类模块,如 SR、D、JK 触发器,常用于时序逻辑建模。 StateMachine Stateflow 状态机建模模块,表示有限状态机和控制流程逻辑。 以上仅针对 Simulink 基础模块库对比,暂不涉及拓展工具箱模块;关于各模块组件的详细信息,请参阅各模块库的帮助文档。
# 建模仿真
我们将重点对比两者在图形化建模、模块库丰富性、跨领域建模和仿真精度等方面的差异,帮助用户评估每个平台在实际工程中的适用性,尤其是在复杂系统建模和本地化需求方面的支持能力。
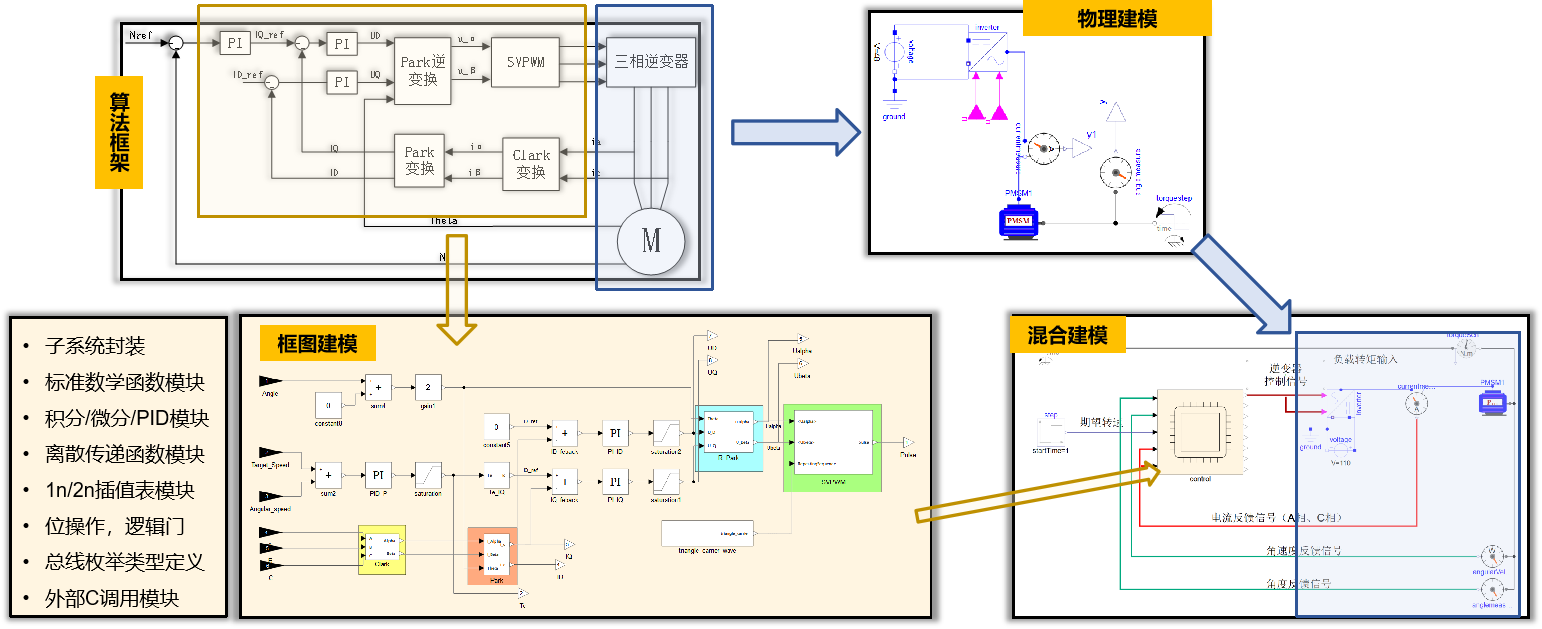
# 物理建模
Sysplorer 是面向多领域工业产品的系统建模与仿真环境,全面支持多领域物理统一建模规范 Modelica。 支持从概念设计到详细验证的全流程研发,显著提升系统级设计效率与可靠性。
与 Simulink 环境对比
特性 Simscape(Simulink) Sysplorer(MWORKS) 建模方式 通过物理网络法封装物理元件,图形化连接物理端口,自动生成微分-代数方程(DAE)并求解 基于方程的建模,陈述式表达模型,可以根据机理方程直接构建等式,无需推导因果关系,在物理建模方面具备优势 接口机制 通过物理端口实现跨域能量交互,使用 PS-Simulink 转换器与 Simulink 信号桥接,确保无缝集成 物理域采用能量流连接器,通过广义基尔霍夫定律传递能量,符合物理实际,避免了对子系统的强行解耦,显著减少了工作量,并且 Sysplorer 中的信号接口能够与信息域 Sysblock 直接连接,无需额外转换 模型库 内置 63 个模型库,包括基础库及专业库 内置 34 个模型库,包括基础库和专业库 仿真求解 变步长、定步长求解算法合计 19 种 变步长、定步长求解算法合计 22 种,支持用户自定义求解算法,通过时钟同步机制,不仅支持多速率模型求解,同时支持不同时钟分区选择不同的求解算法。 仿真后处理 支持变量曲线的显示、统计分析,支持模型 2D 与 3D 动画,查看仿真结果 支持查看任意变量的结果曲线,提供丰富的曲线交互功能,支持模型 2D 和 3D 动画,直观查看仿真过程,支持仿真实时推进、数据回放两种模式查看仿真过程 扩展接口 支持 C / C++ / Python 等语言混合编程或集成,支持 FMI 1.0、2.0 标准,提供部分 SDK 完整支持 FMI 1.0、2.0、3.0 标准,支持基于 FMI 的系统联合仿真,支持 C / C++ / Fortran / Python 等外部语言集成,提供 SDK,支持外部应用集成、界面定制与功能扩展 关于 Sysplorer 信号接口与 Sysblock 框图模型的连接,详情参考混合建模仿真 。
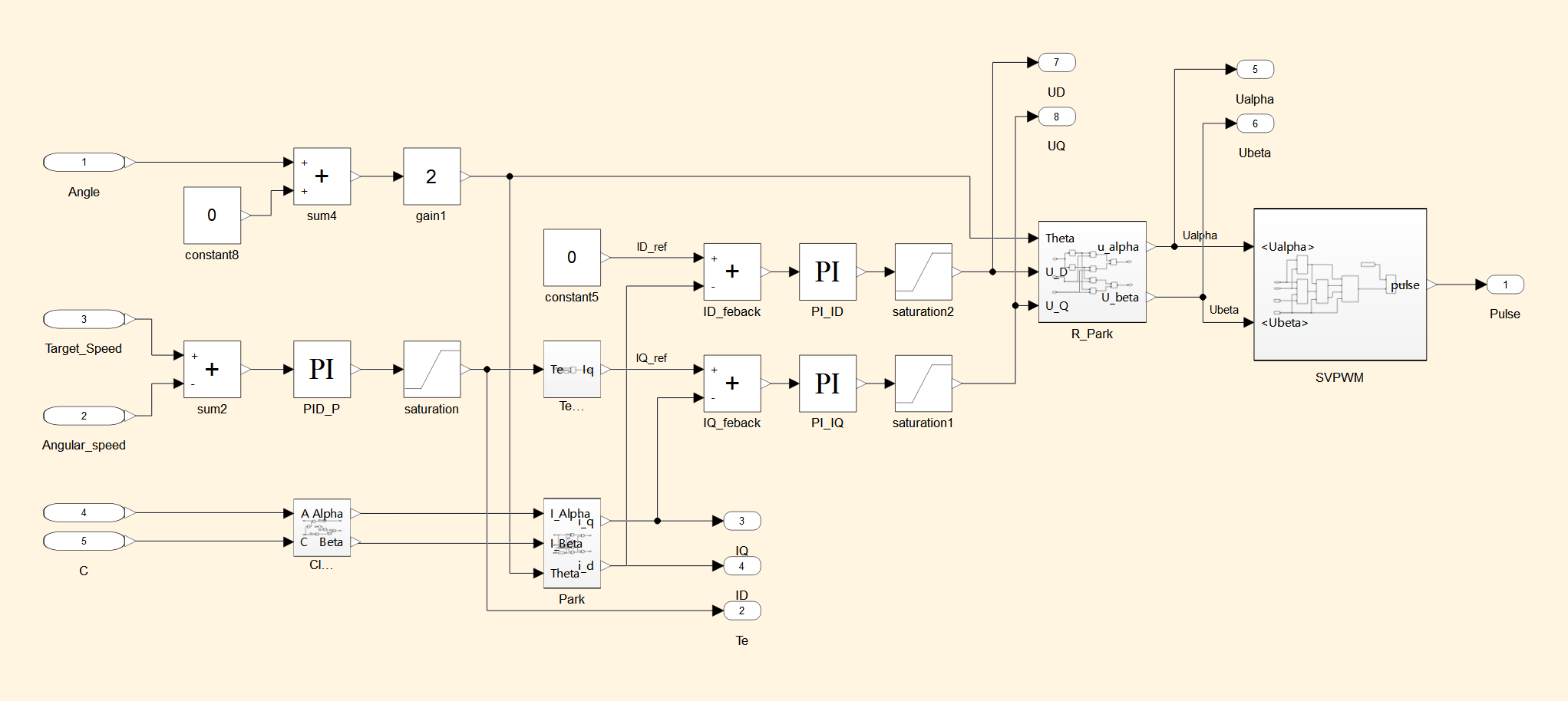
框图建模
框图建模,旨在支持用于在多领域统一建模规范 Modelica 下进行控制策略的开发、验证和优化,为用户提供全面、高效的控制系统设计与分析工具。控制算法支持自验证的同时,也支持连接物理被控对象模型进行闭环验证。
与 Simulink 环境对比
维度 Sysblock Simulink 数据类型支持 基于 Modelica 类型系统,支持强类型变量(Real、Boolean、Integer、Record 等) 支持 double、boolean、int、fixed-point、Simulink.Bus 等 模块接口连接 - 通过端口连接信号线
- 区分信号流与物理流量- 使用 Inport / Outport、 Bus、 Goto 等模块
- 强调信号方向模型层级封装 支持模块嵌套、 Mask 封装、自定义子系统 支持子系统封装、参数传递、函数模块调用 求解器配置 支持 DASSL、Euler、RK 等 DAE/ODE 求解器 提供显式/隐式 ODE 求解器,如 ode45、 discrete 等 数据可视化与输出 支持实时绘图模块、仿真数据导出 Scope、Display、SDI、To Worksapce、To File 等
# 状态机建模
状态机建模提供了基于有限状态机和流程图来构建组合和时序逻辑决策模型,并进行仿真。模型库提供基础图元并可直接嵌入到框图模型中。
它可以针对系统对事件、基于时间的条件以及外部输入信号的反应方式进行建模。
状态机建模可用于设计有关监控、任务调度以及故障管理应用程序的逻辑,支持事件机制以及延迟函数,调试过程支持动画高亮当前状态,支持静态和运行时检查,可以在实时前测试设计的一致性和完整性。
与 Stateflow 环境对比
维度 Sysblock Simulink(Stateflow) 状态建模语法 类似 Statechart/Modelica 状态图,支持状态、事件、条件、动作结构化表达 图形化 Stateflow 编辑器,支持状态层级、并行、历史状态等 事件触发机制 支持显式事件定义、边界条件触发、离散采样等 支持时钟、事件、条件和仿真步长触发,图形事件流清晰可见 状态可视化 结构化文本 + 条件关系显示,可结合仿真信号分析 支持图形路径高亮、状态进入/退出动画显示 状态接口与数据交互 支持状态与框图信号的双向交互,变量作用域明显 状态之间通过局部变量、全局变量、输入/输出信号通信
# 代码生成
这一部分将专注于分析 Sysplorer/Sysblock 和 Simulink 代码生成能力,主要说明其代码生成机制的异同。
# 代码生成机制
Simulink 代码生成
Simulink 采用了高度集成的仿真和代码生成机制。
- 仿真过程中,模型首先被转化为一个可执行的仿真模型,在此基础上,用户可以进行实时仿真与调试。
- 代码生成时,Simulink 通过 Embedd Coder 等工具箱将模型转化为嵌入式 C 代码,生成的代码需要针对不同目标平台进行特定的优化和调整。
Sysplorer 代码生成
Sysplorer 代码生成用于将 Modelica 模型生成 C 代码,可用运行在普通桌面系统,或部署到实时操作系统中运行 。
将物理模型转换为可在实时环境中运行的高效 C 代码或联合仿真代码(FMU)。它生成包含模型代码和接口调用代码的实时代码,支持在不同操作系统和架构的目标平台上运行。
主要特性如下:
- 输出功能实体模型单元(FMU), 生成硬件在环的实时仿真代码;
- 输出源代码(包含求解库), 生成硬件在环的联合仿真代码;
- 输出支持实时仿真平台(Real-Time Platform),生成可迁移至指定实时平台的仿真代码。
关于 Sysplorer 代码生成说明,详情参考 Sysplorer 代码生成概述。
Sysblock 代码生成
与 Simulink 不同,Sysblock 基于统一的 Modelica 语言标准规范,实现了框图、状态机的无缝统一,确保了生成代码与仿真过程的一致性。
主要特性如下:
- 统一建模环境
- 统一语言规范
- 统一编译分析
- 统一代码生成
- 统一调度求解
在 Sysblock 中,所有的建模和仿真流程均基于统一的 Modelica 语言规范,仿真和代码生成的过程中没有不必要的重复性验证步骤。由于 Modelica 本身具备强大的跨领域建模能力,并且其标准化程度较高,Sysblock 能够确保在不同物理系统和嵌入式平台之间的结果一致性。
关于 Sysblock 代码生成说明,详情参考创建组织和发布自定义模块集合。
# 平台能力
除了框图建模,MWORKS 与 Simulink 环境提供了物理建模与科学计算能力,以下是两个环境的差异对比。
物理建模
Sysblock 基于 MWORKS 系统建模平台和 Modelica 建模规范,实现了框图、状态机和物理模型的无缝统一,Simulink 中使用 Simscape 物理建模环境,两者存在差异。
特性 Simscape(Simulink) Modelica(MWORKS) 建模方式 基于图形化的建模,模块化建模 基于文本的建模,面向对象的建模,MWORKS 图形化建模 集成环境 与 Simulink 无缝集成 与 MWORKS 物理建模环境无缝集成 物理领域支持 电气、机械、热力学、流体等多物理领域 支持广泛的多物理领域,具有行业标准库和 MWORKS 标准库 求解器和仿真 基于 Simulink 仿真引擎和求解器 独立自主知识产权的仿真编译求解底层算法 灵活性和扩展性 通过 MATLAB 拓展,适合快速原型设计 高度灵活,适合复杂的多领域建模 使用场景 控制系统、电气、机械、热力学等工程应用 跨学科、大规模系统建模,尤其是复杂系统应用 科学计算
Simulink 基于 M 语言(MATLAB)的科学计算环境,Sysblock 基于 MWORKS 平台内的 Syslab 科学计算环境,采用 Julia 为核心支持语言,同时支持 Python 语言,并支持二者的互相调用。
特性/维度 M 语言(Simulink) Julia(MWORKS 主语言) Python(MWORKS 辅语言) 性能 中等,适合中小规模计算,支持并行和 GPU 加速 高,接近 C 语言性能,支持并行和 GPU 加速 中等,借助 NumPy、Cython 等可优化性能 易用性 非常易用,适合快速开发 易学,简洁的语法,适合数学计算 非常易学,简洁的语法,灵活的开发模式 库支持 强大,丰富的商业工具箱 快速增长,专注于科学计算和高性能计算 非常强大,数值计算、机器学习等领域的顶尖库 社区支持 强大,尤其在工程领域 增长中,活跃的高性能计算社区 极其庞大,数据科学和 AI 领域的领先语言 扩展性与灵活性 适度,主要与 C、C++ 等外部语言接口 高度灵活,开源,支持与其他语言集成 极高,广泛支持多种库和扩展,适合多领域 适用场景 工程、控制、信号处理、数学建模等 高性能计算、优化、模拟、科学研究 数据科学、机器学习、物理建模、AI 等
# Simulink 模型兼容与导入
Simulink 模型导入工具支持将.slx模型转换为 Sysblock 模型并在 Sysplorer 可视化建模环境中打开,支持导入 Simulink 模型数据以及框图组件信息,并生成报告。其中,数据导入支持工作区数据、数据字典和 SignalBuilder 数据,框图组件导入支持普通组件、子系统、状态机、仿真设置、Link 子系统以及模型引用。
模型兼容的工作流如下:
Simulink 导入配置
- Simulink 模型文件路径
- Simulink 工作区数据导入
- 配置生成的 Sysblock 模型目录
自动转换为 Sysblock 模型
- Simulink 模型文件解析
- Sysblock 模型生成
- 模型转换日志文件生成
完善、调试与对标
- 手动替代不支持的组件
- 在 MWORKS 软件环境调试
- 对比转换前后模型仿真结果
由于 Simulink 模块类型众多、机制复杂,有些机制甚至是“黑箱”,以下将陈述工具目前支持与不支持的场景。
提示
具体细节项请参见 Simulink 模型导入工具。