# 示例
# 物理建模
# Modelica 基础功能
# 机械专业模型库
提示
单击打开示例后,可能会出现图形视图显示异常的情况,原因是未加载对应的模型库。此时单击主页工具栏检查按钮,会自动加载对应的模型库,通过检查后模型会正常展示。
# 平面机械模型库
# 基础机械模型库
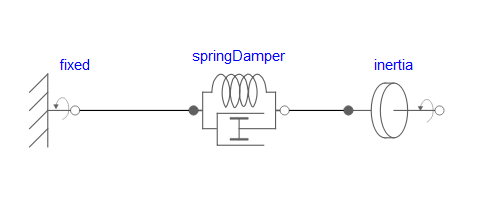
一维平动模型
一维转动模型
# 传动系统模型库
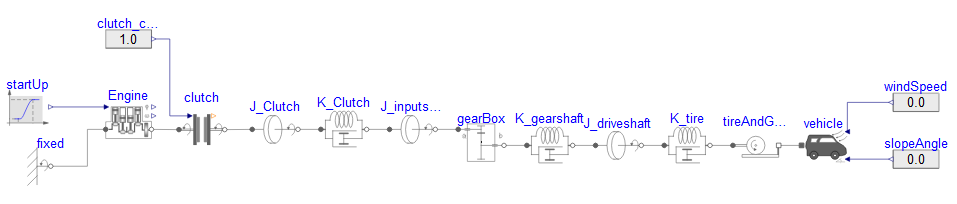
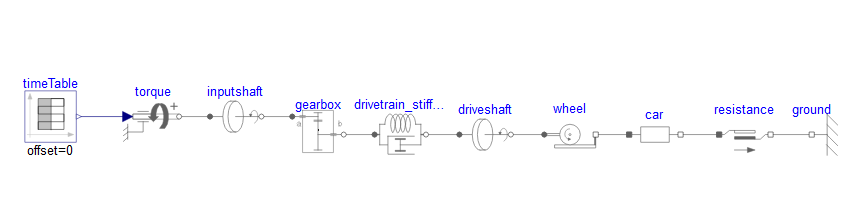
车辆起步分析
模拟简单汽车的起步工况的运行,发动机的初始启动转速为 800 rpm,通过左侧的 startUp 起步信号控制 0-15s 的发动机信号,模拟车辆起步过程,分析转轴和车辆的加速度振动情况。
打开示例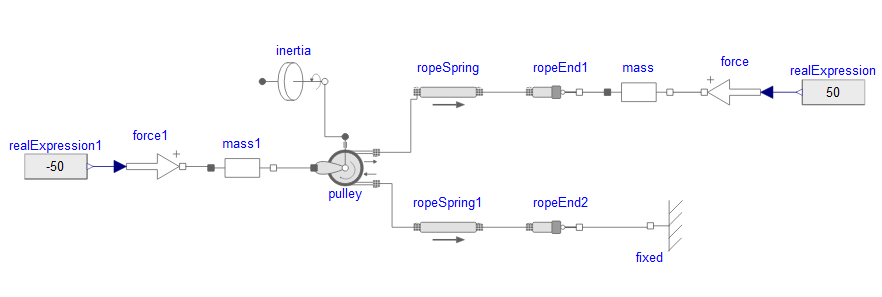

# 多体系统模型库
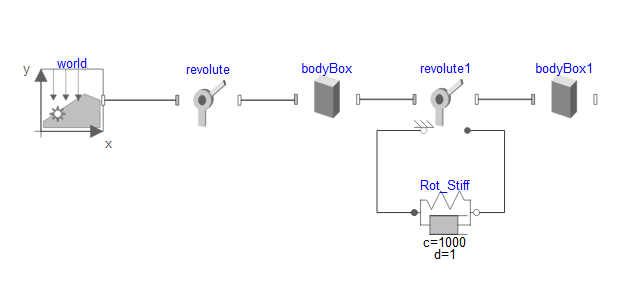
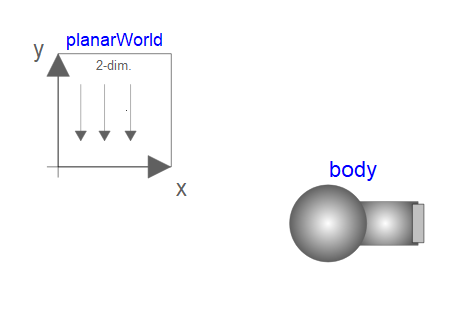
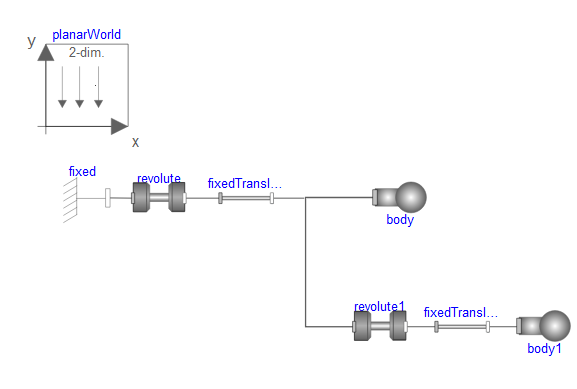
双摆
双摆模型是一种经典的物理模型,用于描述两个相互连接的摆的运动行为。该模型是一个简化系统,由摆臂、关节、重力组成,其中两个摆臂通过一个固定的轴连接在一起,可以自由摆动在机械工程中,可以用来设计和分析双摆钟、摇摆门以及机械振荡器等设备;在控制过程中,双摆模型可以用来研究和设计控制系统,以实现双摆系统的稳定控制和轨迹跟踪。
打开示例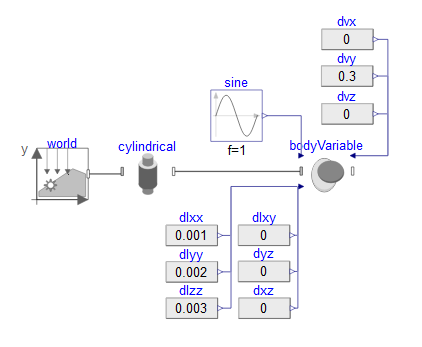
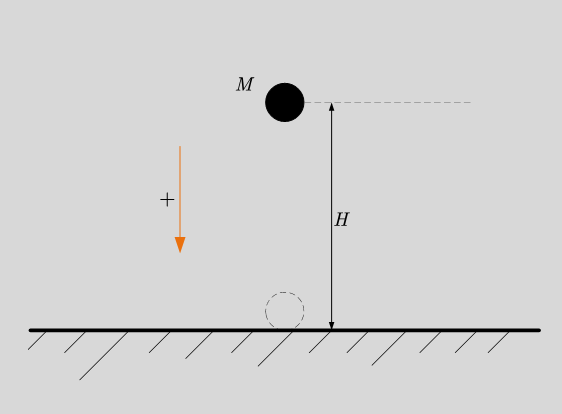
变质量刚体系统
变质量刚体系统是指系统中的质量不是固定的,而是伴随系统的运动而发生改变。这种系统通常用于描述推进机制的航天器或者飞行器等动力学系统。在变质量系统中,系统的质量可能会因为喷射推进剂、释放物质或者其他因素而变化,从而导致推进过程中的动量、惯性等发生变化。
打开示例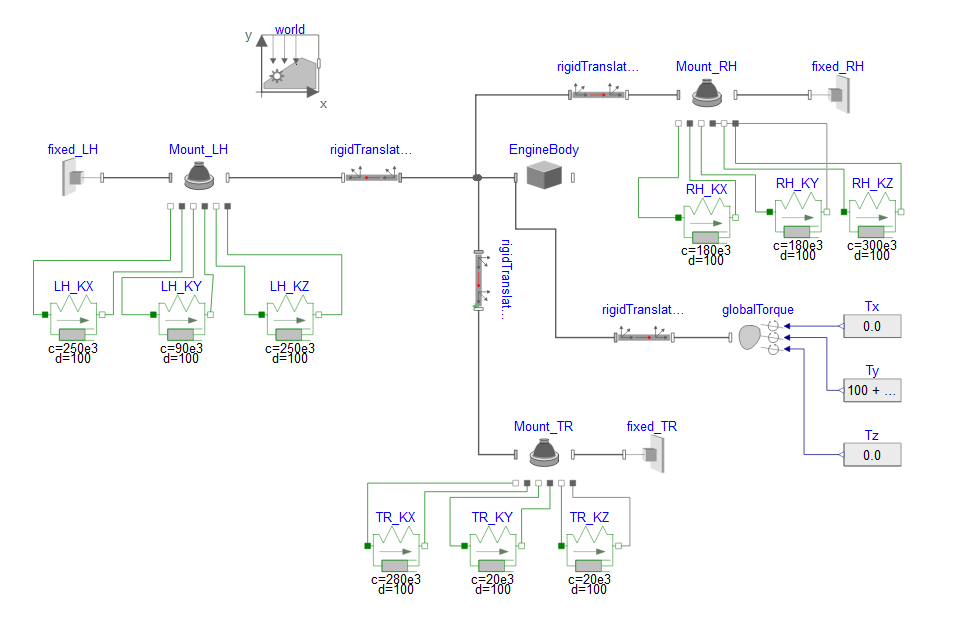
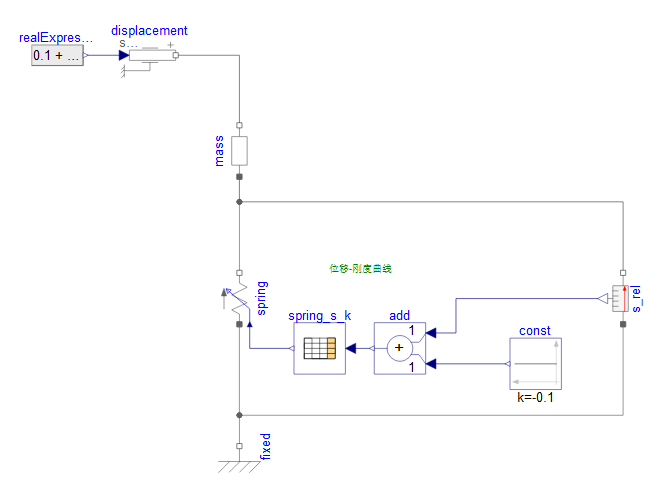
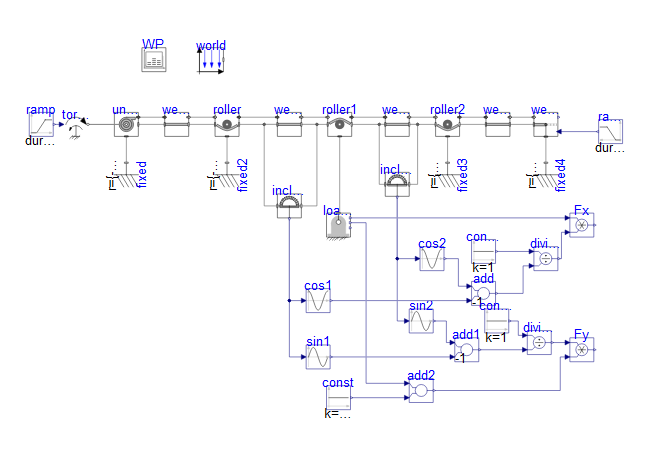
发动机悬置
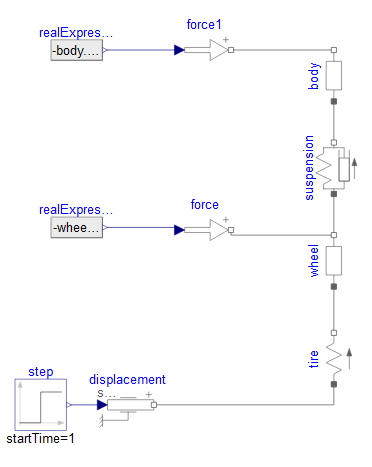
发动机悬置系统是指将发动机安装在车辆或飞行器中的一种工程设计,通常是使用橡胶悬置、液力悬置和主动悬置等,将发动机与车辆或者飞行器的车架、机身连接起来,以便提高车辆稳定性、减少振动和噪音等。该系统的关键参数有刚度、阻尼、固有频率等,通过弹性元件吸收振动能量,从而减少振动传递到车架或机身的能量。
打开示例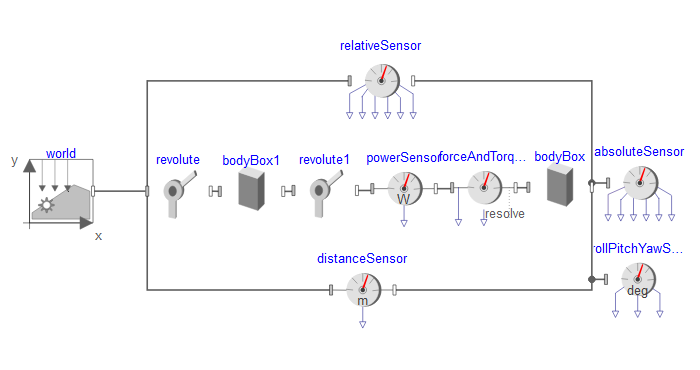
使用传感器
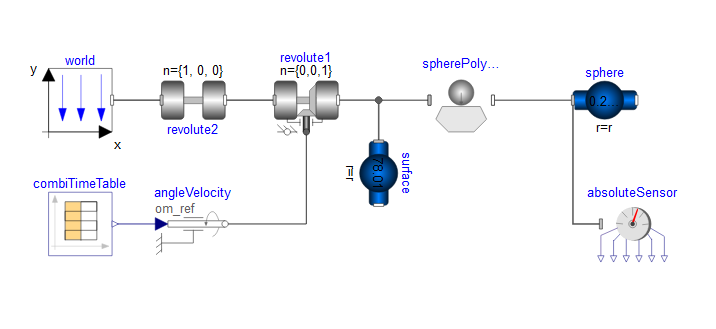
该案例以双摆模型为例,旨在帮助用户使用多体系统中几个常用的传感器模型,比如绝对传感器、相对传感器,包括绝对/相对位置测量、绝对/相对角位移测量等。传感器广泛应用在机器人、自动化、机械控制等领域,用于测量和监控多体运动系统中各种物理参数。
打开示例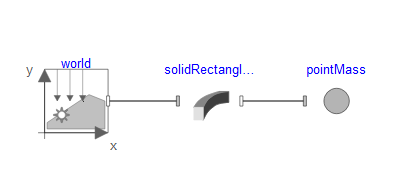
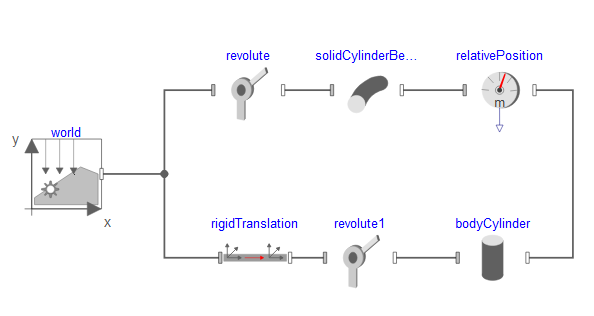
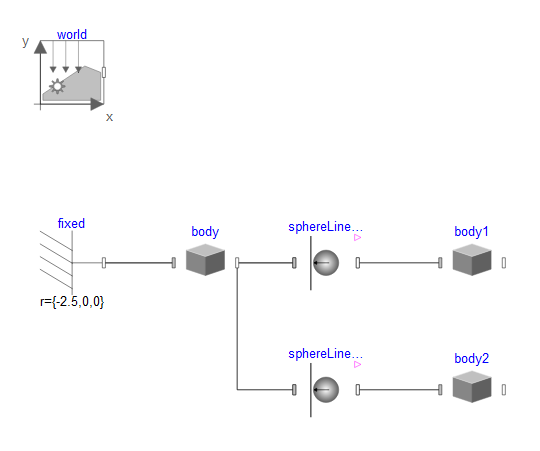
柔性梁的单摆对比
柔性梁的摆动变形是一种综合了弯曲、拉伸以及摆动特性的复杂运动。在重力的作用下,柔性梁的自由端会发生弯曲变形,当柔性梁开始下摆,受到重力的梁会产生拉伸变形。可以通过与刚体单摆模型对比,使用相对位移传感器能够测量柔性梁的端部变形。
打开示例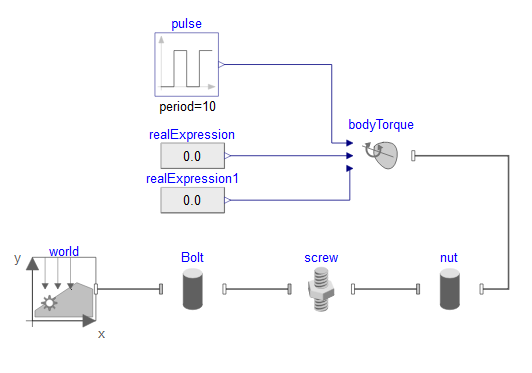
螺母螺旋运动
螺母(Nut)通过转动,可以沿着螺栓(Bolt)的轴向方向移动,从而实现螺栓的固定和松开。螺旋运动同时包括旋转和平移两种运动,物体沿着螺旋线向前推进的同时能够发生绕轴旋转。螺母螺旋运动应用在螺纹连接、螺旋输送机构、螺栓升降机构等场景中。
打开示例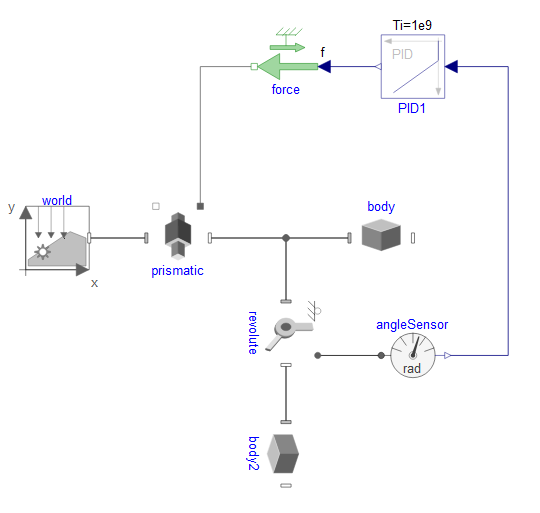
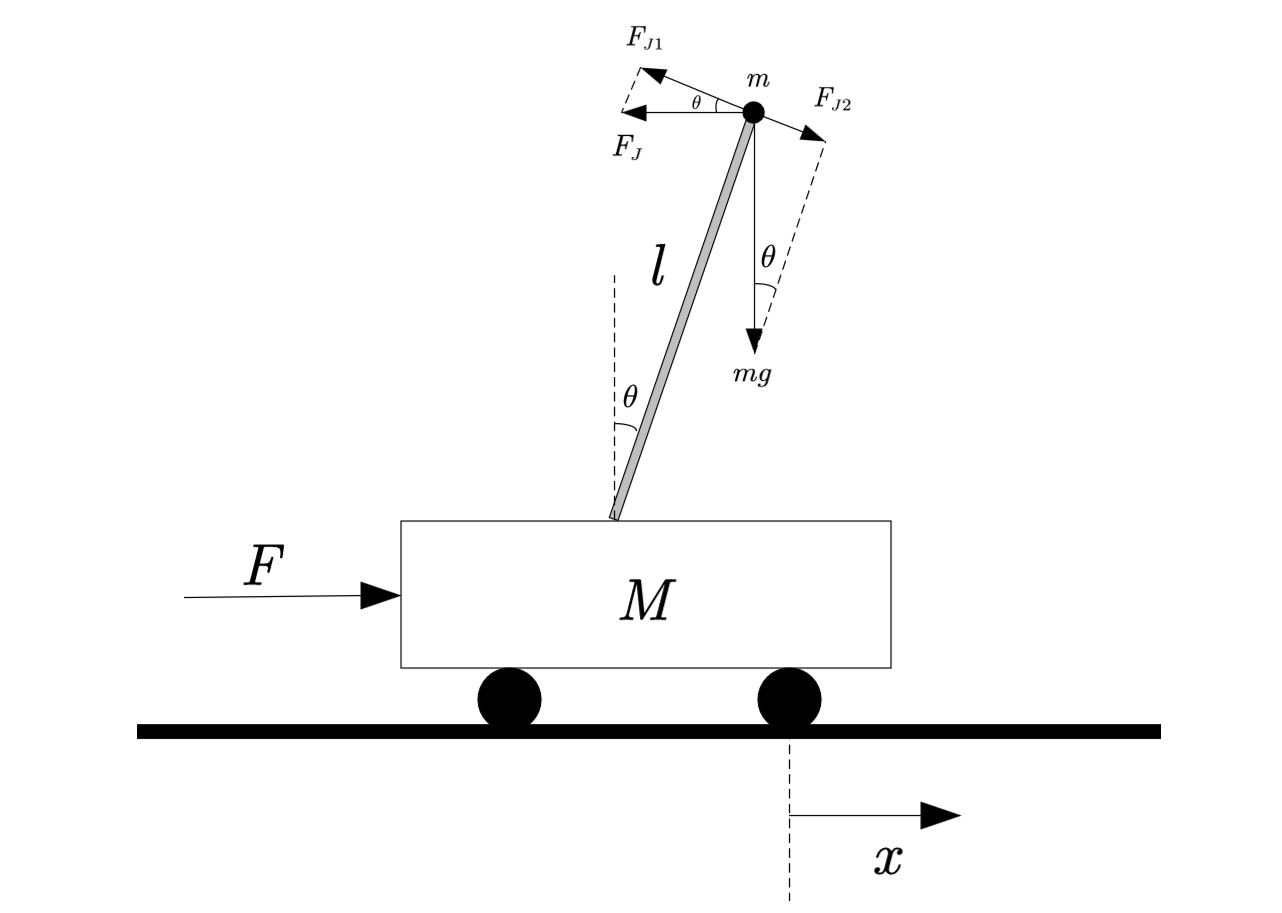
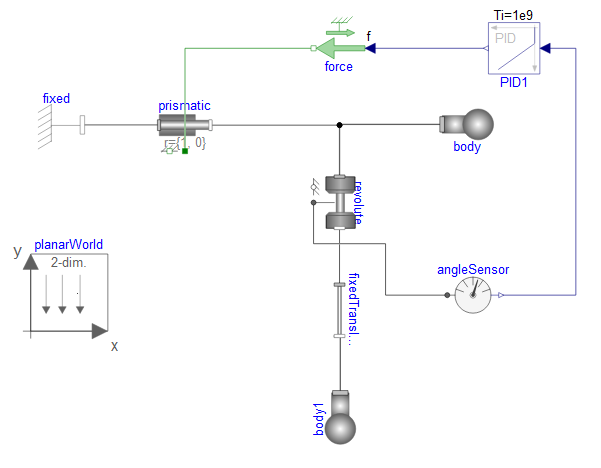
倒立摆
倒立摆系统是一种经典的控制系统问题,通过 PID 控制方法,调整比例、积分和微分系数来控制小车的运动保持摆杆直立状态。它广泛应用于两轮自平衡机器人、火箭发射阶段的姿态控制以及自动运输小车的稳定控制等。
打开示例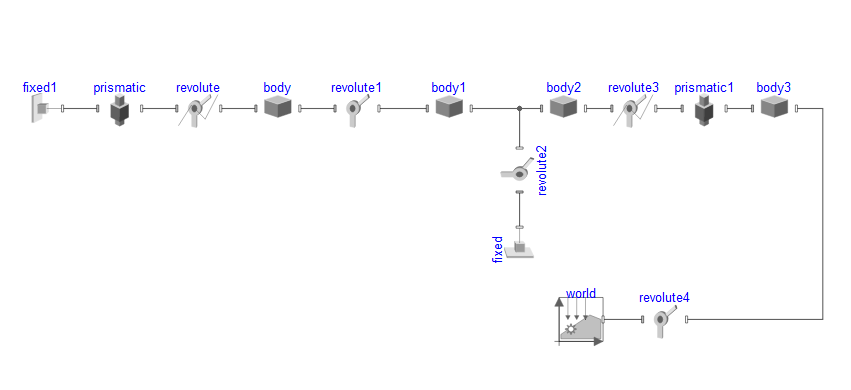
四杆曲柄滑块结构
四杆曲柄滑块结构是一种重要的机械闭环结构,常用于内燃机、柴油机、活塞泵等机械设备中。曲柄滑块结构由曲柄、连杆、滑块等部件组成,主要将旋转运动转换为往复直线运动或者反之,都具有广泛的工程应用。当曲柄旋转时,连杆会产生往复直线运动,这是由于曲柄的转动运动被连杆传递到连杆或者滑块上。
打开示例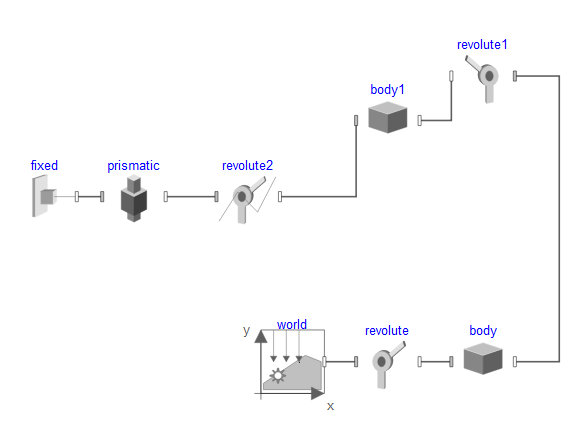
二杆曲柄滑块结构
二杆曲柄滑块结构是一种重要的机械闭环结构,常用于内燃机、柴油机、活塞泵等机械设备中。曲柄滑块结构由曲柄、连杆、滑块等部件组成,主要将旋转运动转换为往复直线运动或者反之,都具有广泛的工程应用。当曲柄旋转时,连杆会产生往复直线运动,这是由于曲柄的转动运动被连杆传递到滑块上。
打开示例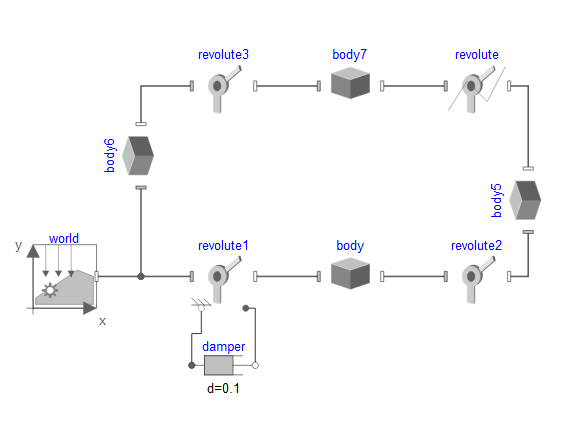
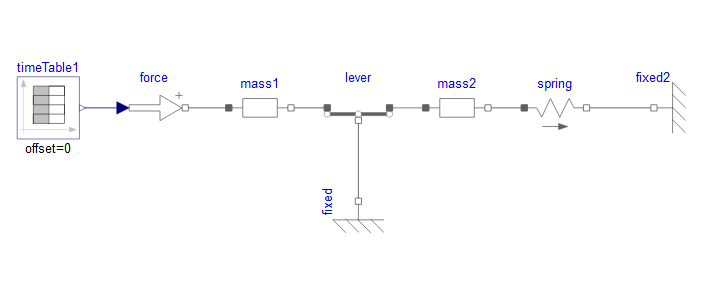
平面四连杆机构
平面四连杆(曲柄摇杆)结构是一种特殊的四连杆机构,其所有连杆和铰链均在同一个平面内运动,它由固定杆(机架)、曲柄、连杆、摇杆等部件组成,通过运动副将运动传递给其他连杆,都具有广泛的工程应用。
打开示例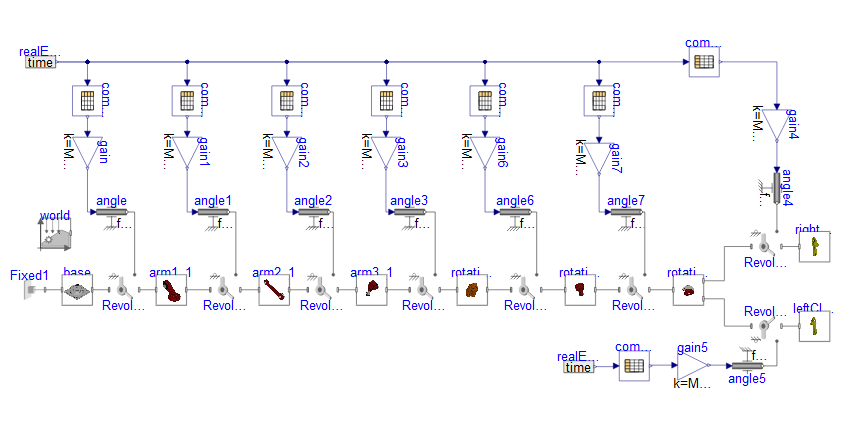
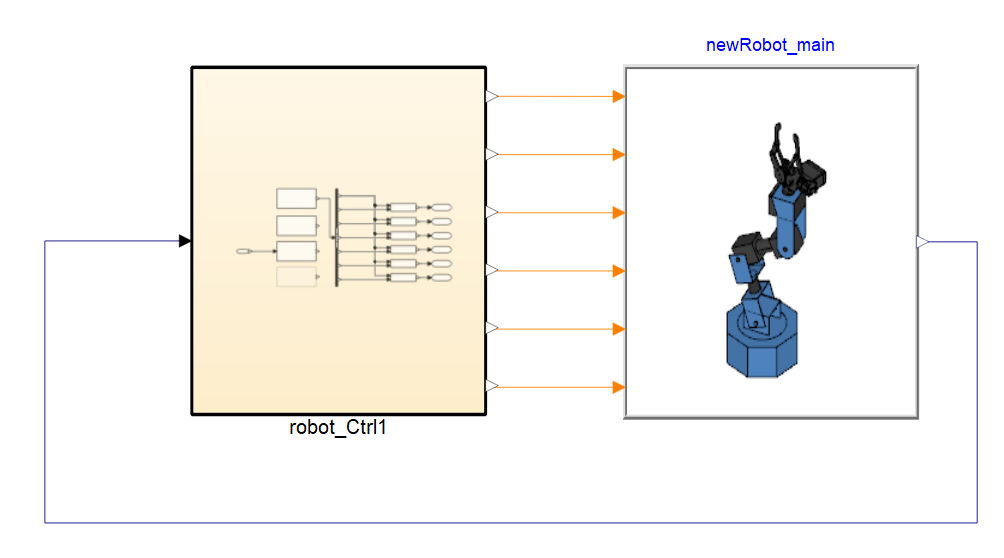
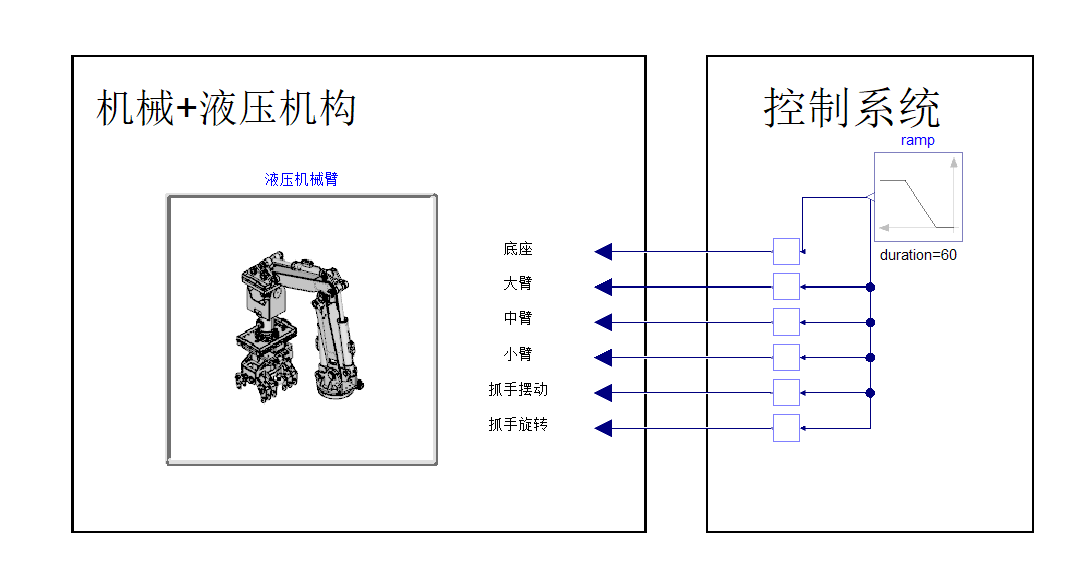
6 自由度机械臂作业系统
6 自由度机械臂由底座、多个连杆支臂、转动关节以及末端执行器组成,它是工业自动化和机械人技术中的核心设备。底座是机械臂的支撑部分,通常固定在工作台上;连杆支臂是连接底座和末端执行器的部分,通过 6 个关节的协同工作,使得机械臂能够达到空间中任意一点并进行任意姿态的定位,从而实现高度灵活的操作。
打开示例# 柔性体模型库
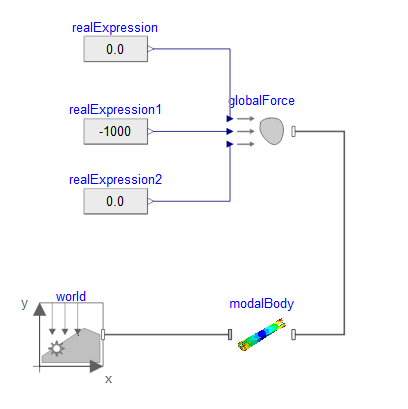

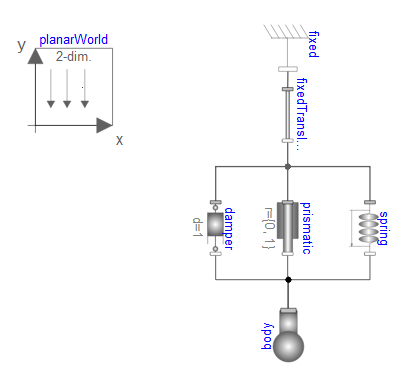
带预载荷的杆
带预载荷的杆模型是描述在设计中已经施加一定预载荷的杆件(如拉杆或压杆)行为的一种力学模型,常应用于机械紧固件、预应力钢索,悬挂系统中的预载荷弹簧等,可以有效提高系统的强度、刚度和稳定性。
打开示例# 接触模型库
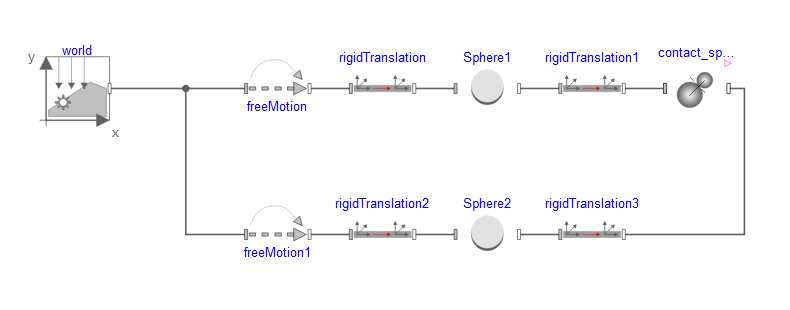
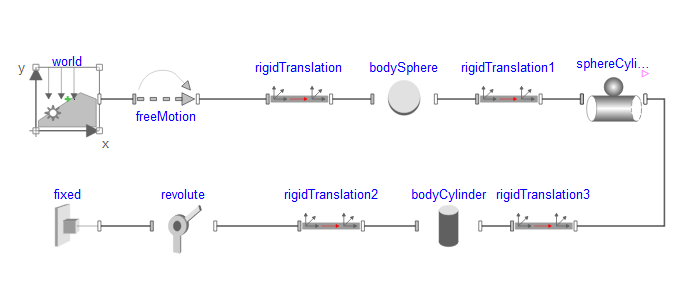
球驱动圆柱转动模拟
该模型是可以模拟两个小球在 X-Z 平面的相对运动和碰撞分离。球体质心的全局初始位置从接口 A 相连的多体元件和球体自身属性设置。在该模型中考虑小球受到的重力,重力沿 y 的负方向。
打开示例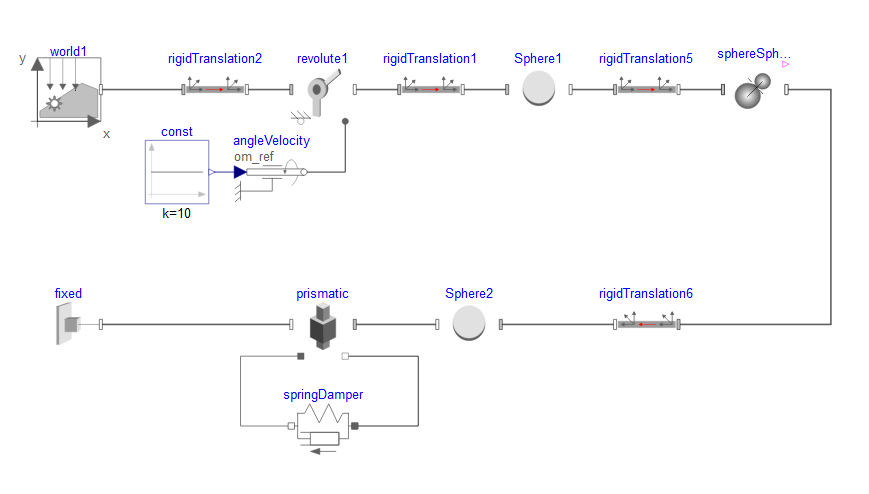
轮系进给机构
该模型是通过偏心选择的球模型和小直径的点模型、弹簧阻尼,模拟凸轮驱动直杆进行固定方向的进给运动。为了防止空负载运动速度过快,用弹簧阻尼模型和固定端模拟杆末端的负载,控制运动速度。
打开示例
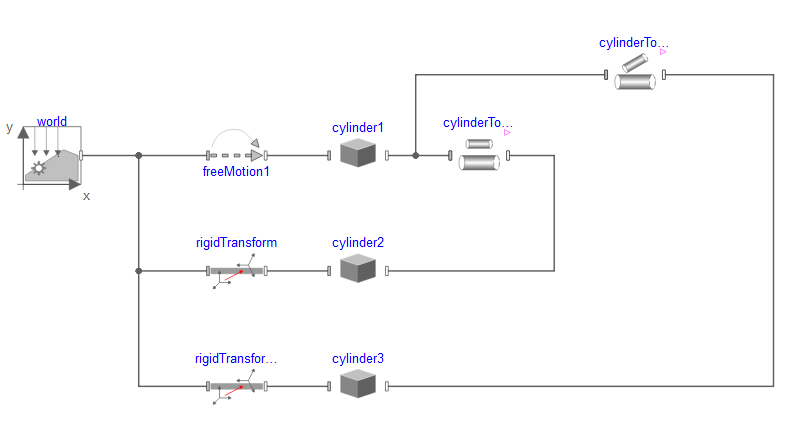
脚手架碰撞模拟
该案例为圆柱和其他两个固定圆柱的线接触模型,可以分析各实体几何之间的组合接触(点接触和线接触)检测,接触力大小的计算。通过接触模型,可以测量和分析接触法向力和摩擦力,判断运动圆柱的接触状态,各方向的运动位移,该案例可以模拟建筑行业中,脚手架的安全接触碰撞检测。
打开示例

# 三维传动系统模型库
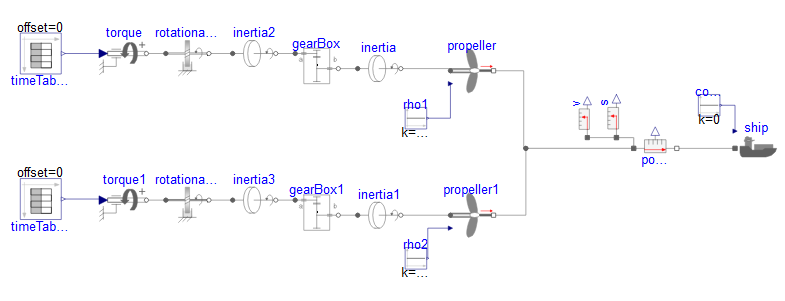
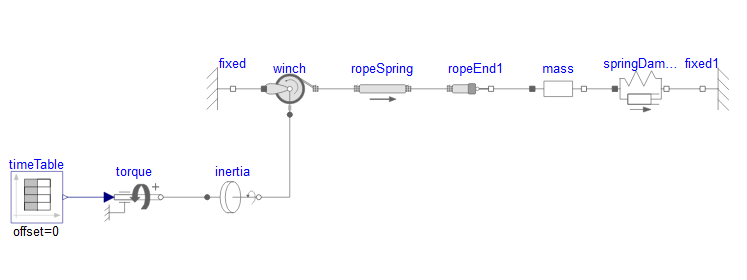
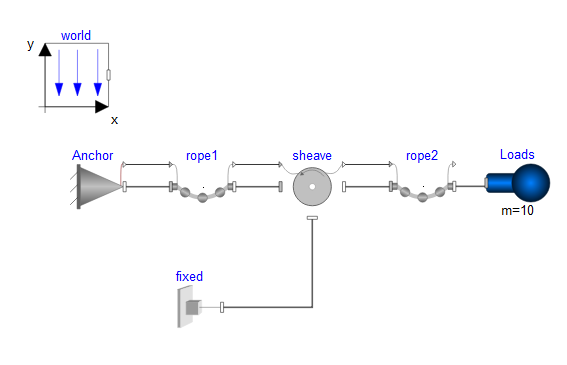
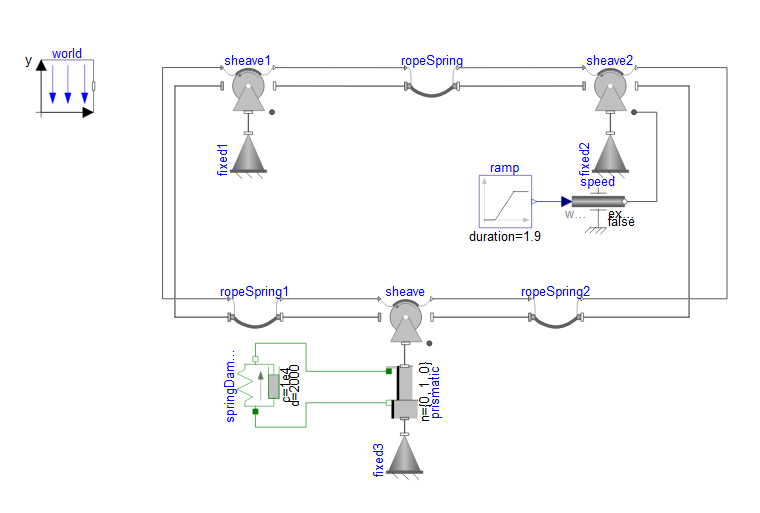
绳索滑轮传动系统
悬链线系统
悬链线系统是指在重力场中,由两点悬挂的柔性且不可伸长的链条或绳索在自重作用下所形成的曲线,其形状与抛物线类似。假设绳索完全柔性且自身受到重力和绳索张力共同作用,最终达到平衡状态。通过对绳索离散计算,得到悬链线的形态和变形情况。悬链线系统的应用有:悬索桥设计、长距离高压输电线管道布设等。
打开示例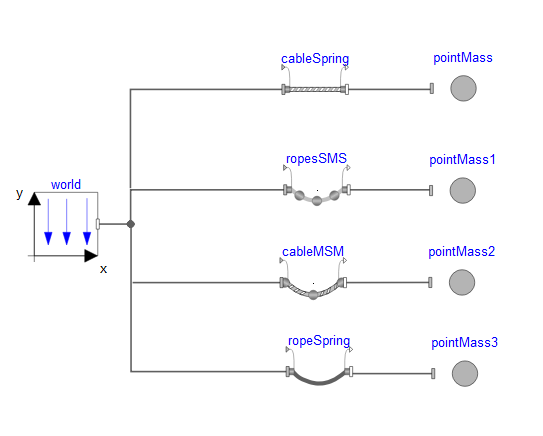
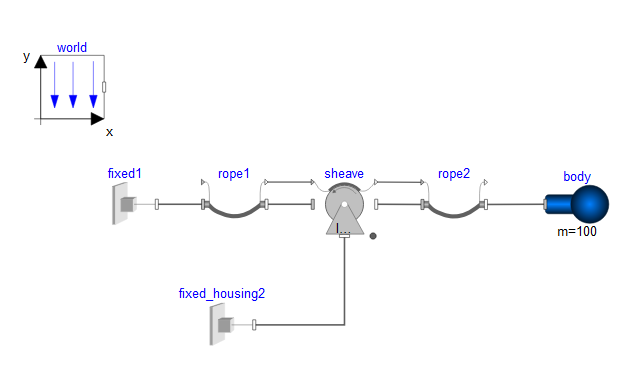
秋千绳系统
秋千绳是一种娱乐设施,其基本结构和原理可以通过绳索单摆来模拟,主要有绳索、定滑轮,由一根固定长度的绳子悬挂在固定点,通过穿过滑轮,末端连接一个集中质量的小球(表示人和座椅的组合),当秋千从某一位置释放后,它在重力的作用下来回摆动。
打开示例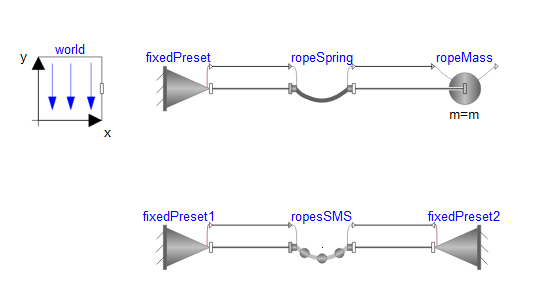
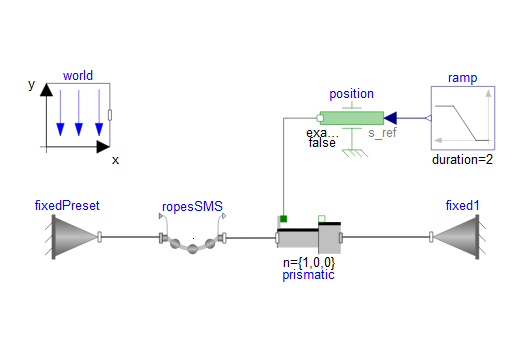
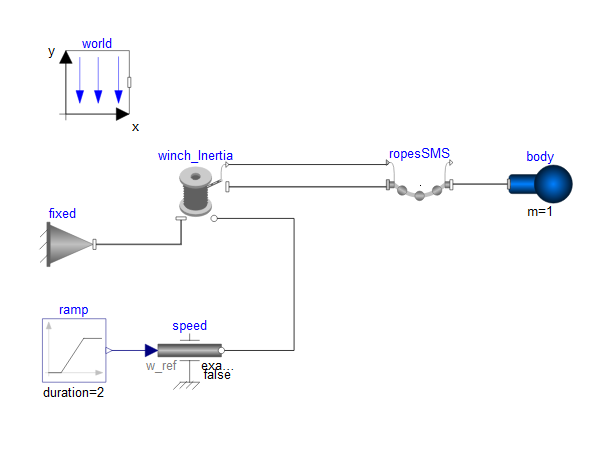
变长度绳索释放系统
该案例有两个系统,分别是绳索长度的变长和变短,第一个是系统是单摆杆自由释放,绳索的长度和质量都减少,第二个系统的两端固定,在右端释放绳子,并通过离散化得到变长度柔性绳索。
打开示例
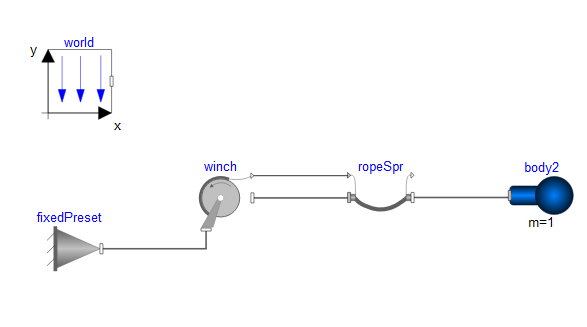
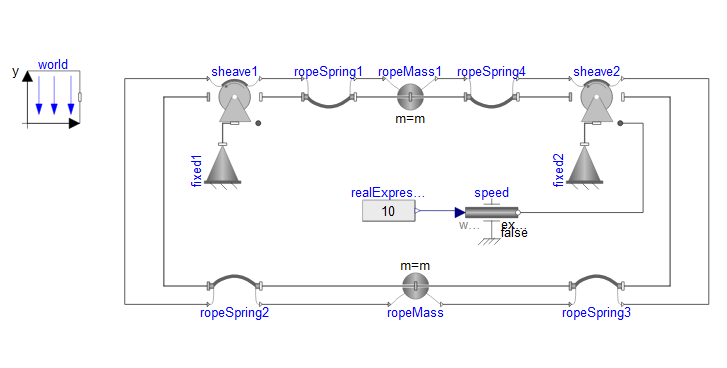

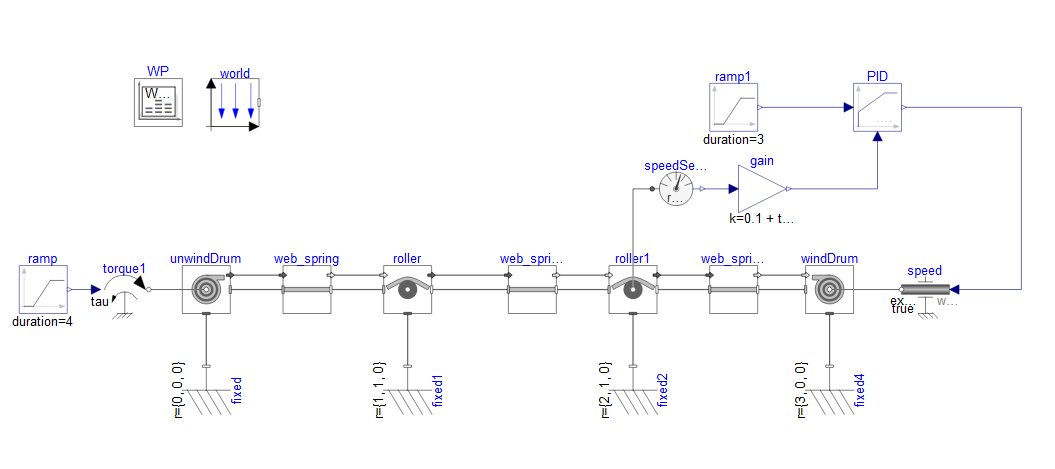
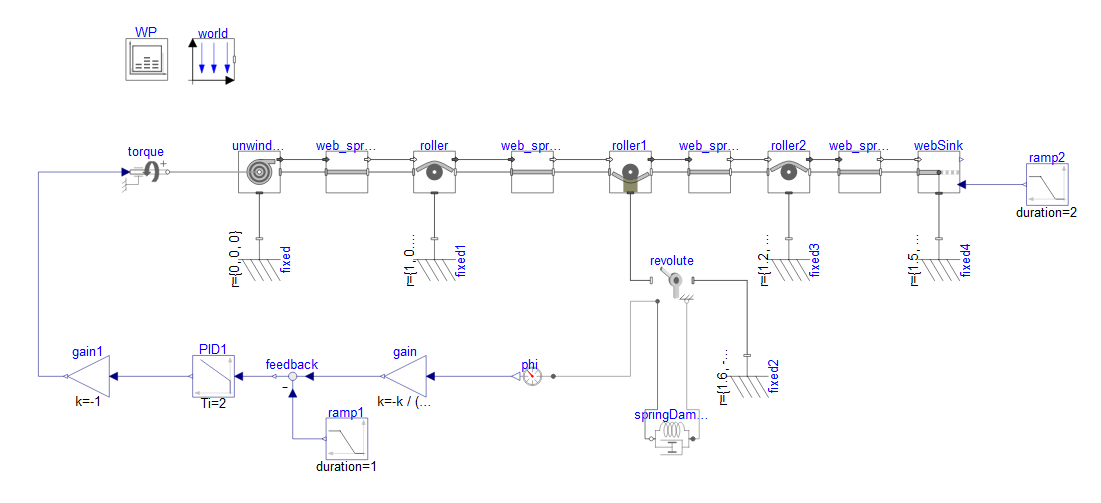
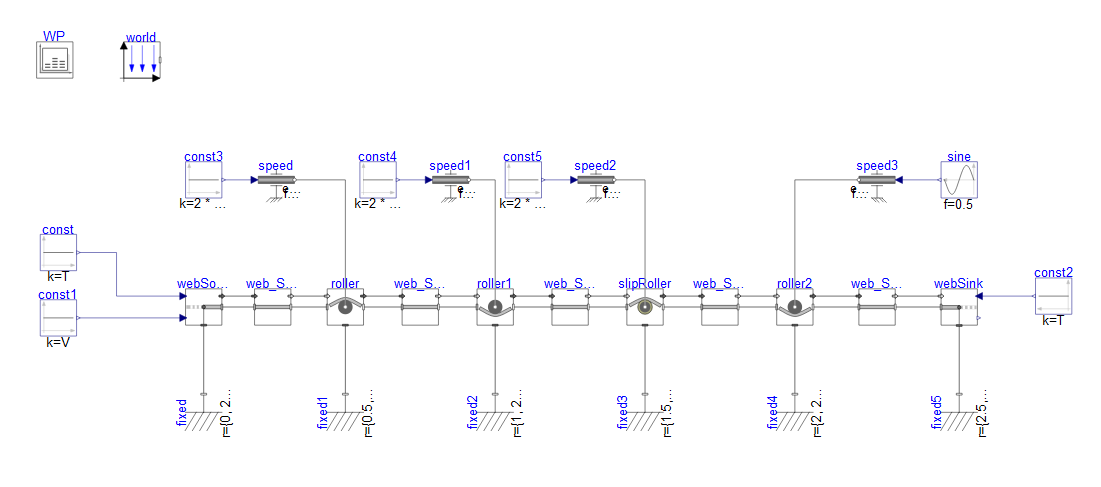
带浮辊的绳索传动系统
带浮辊的绳索传动系统,通常将浮辊安装在摆臂滑轮位置,是一种常用的张力控制装置,该系统区别去直线弹簧控制,它能够吸收张力变化瞬间的剧烈波动,张力控制较为平稳。进而可以通过添加PID控制器,计算所需驱动单元速度的调整量。
打开示例
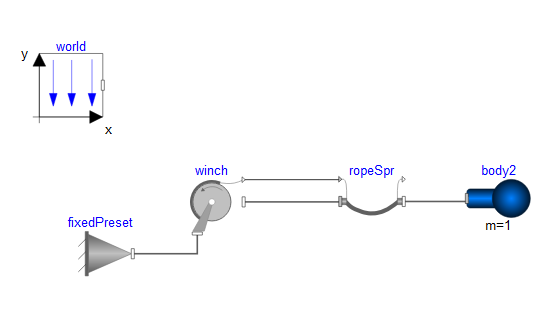
缆车张紧控制系统
缆车张紧控制系统常用于景区缆车或者运输货物缆车,其基本结构和原理可以通过绳索传动来模拟,主要有弹性绳索、定滑轮,动滑轮、移动车厢等,通过穿过两端的定滑轮,有一个绳索上的滑轮往复运输,并通过控制该段绳索的张力,调整相应的位置。
打开示例
链条链轮传动系统
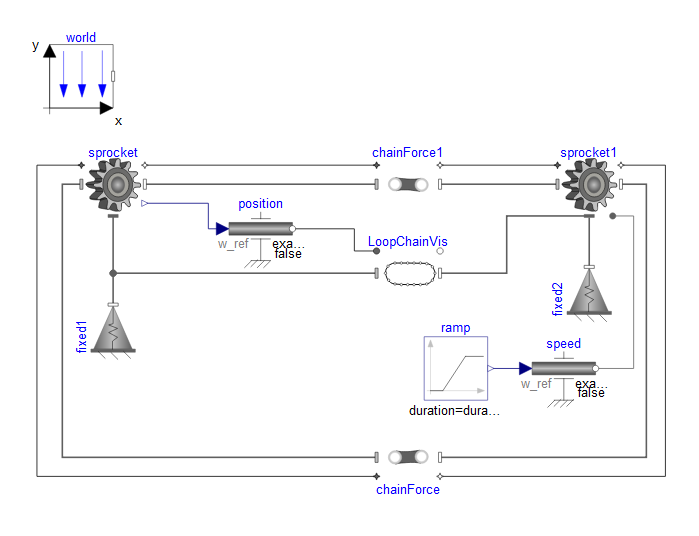
上升驱动链条链轮传动系统
上升驱动链条链轮驱动系统广泛应用于机械传动系统中,它由链轮、链条和驱动源组成。链轮通过链条与另一个链轮相连,通过将链轮链条安装在竖向方向,实现动力传递和旋转。驱动链轮通过电机或者其他动力源驱动,可以将动力传递到不同高度的链轮上,从而实现垂直传动。
打开示例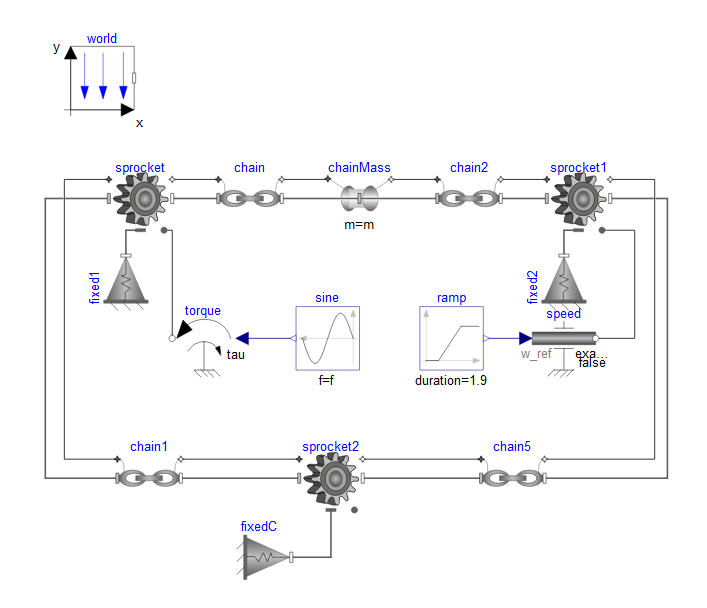
齿轮传动系统
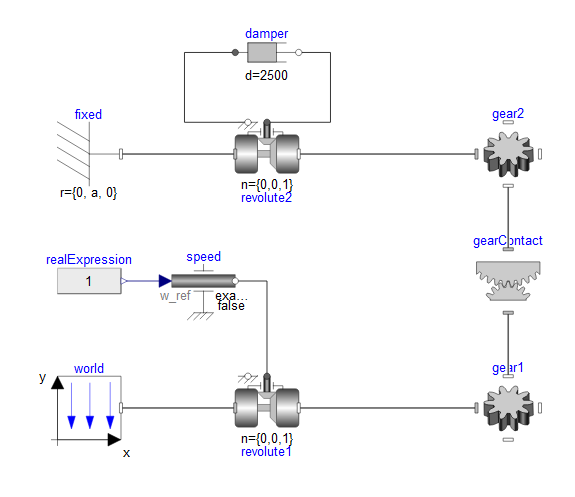
外啮合直齿齿轮传动
外啮合直齿齿轮传动是机械传动中一种常见的方式,主要用于传递旋转运动和扭矩,其结构简单且制造成本低,广泛应用于各种机械设备之中。在该案例中,两个外啮合齿轮通过直齿啮合力接触模型相连接,确保在啮合过程中传递的动力平稳且高效。
打开示例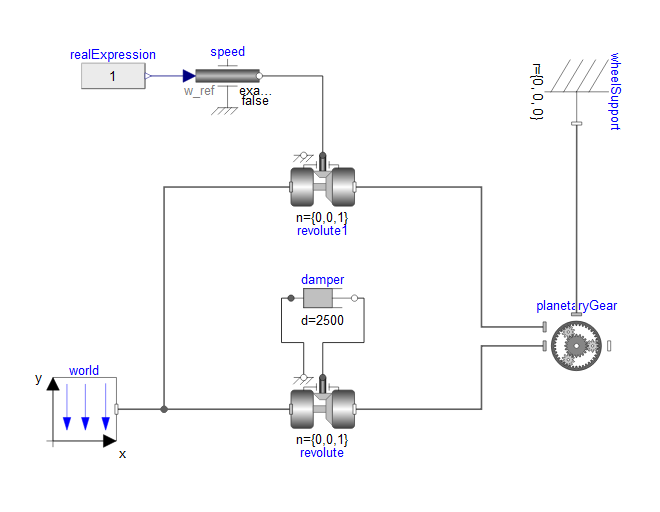
行星齿轮
行星齿轮系统是一种复杂的齿轮传动机构,广泛应用于自动变速器、机器人和航空航天等领域。该系统由一个中心的太阳轮、多个行星轮和一个内齿圈组成,行星轮围绕太阳轮旋转,同时在内圈内进行啮合,实现高效的动力传递。
打开示例轴承
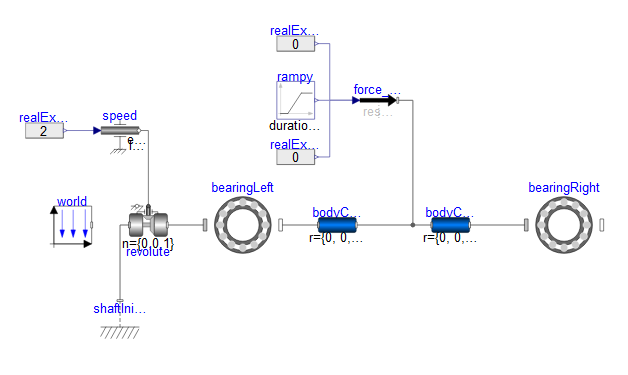
滚子轴承支撑简支梁
滚子轴承支撑简支梁模型是分析轴在滚子轴承支撑下受力和变形的方法,在该模型中,轴的两端通过滚子轴承固定,轴的中间受到集中力的作用,形成简支梁结构,允许轴自由转动但是不允许纵向位移。由于滚子轴承具有低摩擦特性,能够显著减少能量损失。从而提高系统的运行效率。
打开示例空间机构传动系统
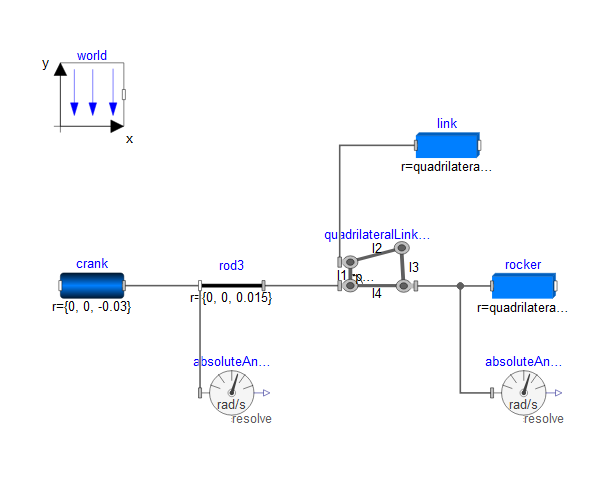
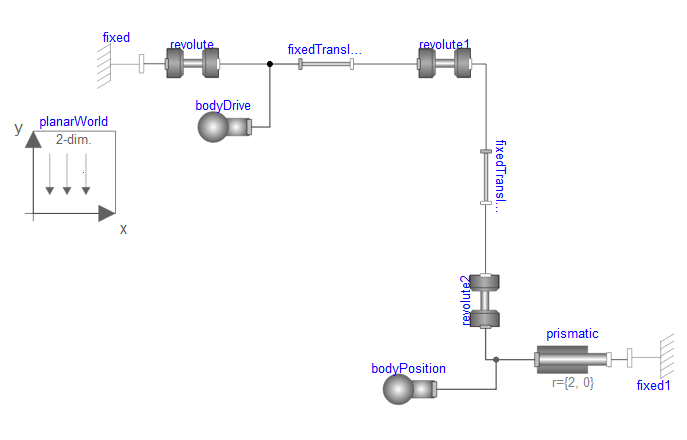
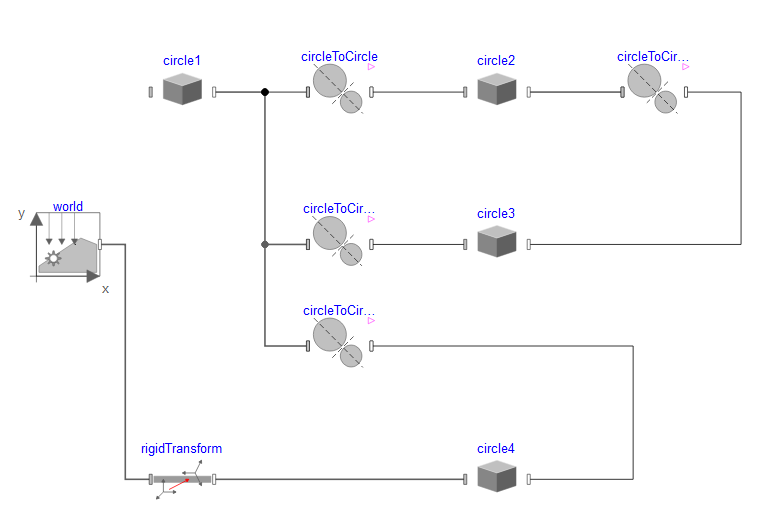
四连杆机构
四连杆机构是一个经典的平面机械模型,该案例中的模型可以代替传统的由刚性构件和低副关节连接的几何机构,直接用约束方程的解析解表示四杆机构,可以减少四杆机构的组合调试过程,提高模型效率。
打开示例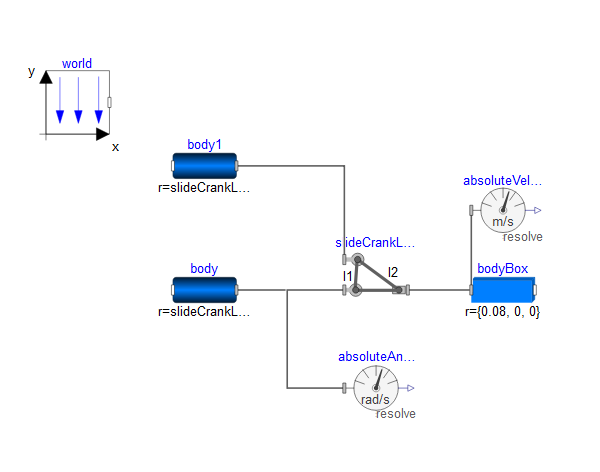
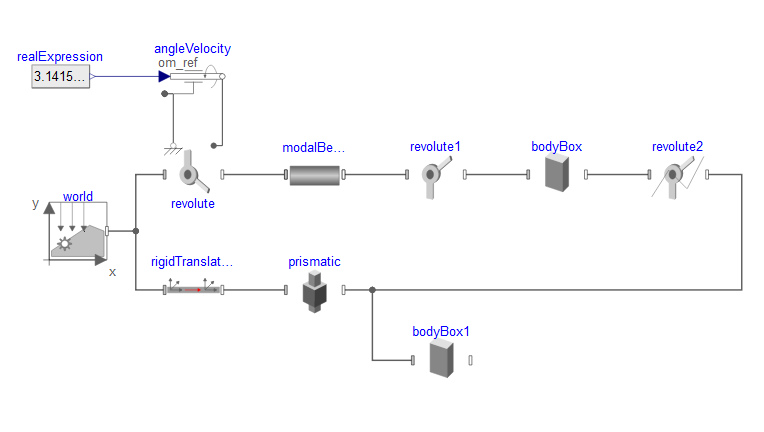
曲柄滑块系统
曲柄滑块机构是一个经典的平面机械模型,该案例中的模型可以代替传统的由刚性构件和低副关节连接的几何机构,直接用约束方程的解析解表示曲柄滑块机构及其动画设置,可以减少曲柄滑块机构的连接、初始位置调试过程,提高模型效率。
打开示例# 流体专业模型库
提示
单击打开示例后,可能会出现图形视图显示异常的情况,原因是未加载对应的模型库。此时单击主页工具栏检查按钮,会自动加载对应的模型库,通过检查后模型会正常展示。
# 液压模型
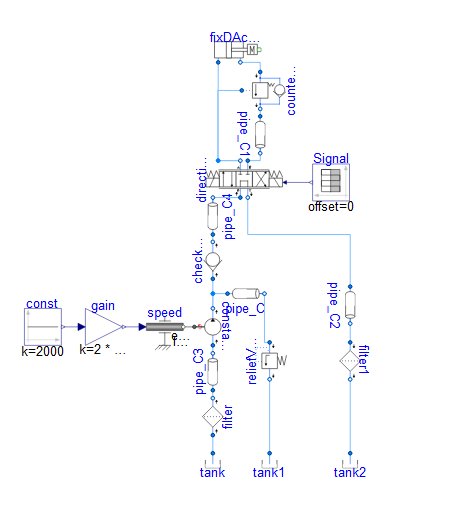
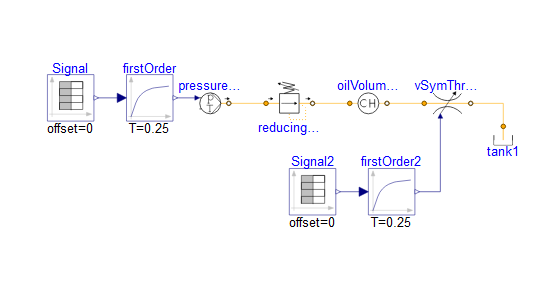
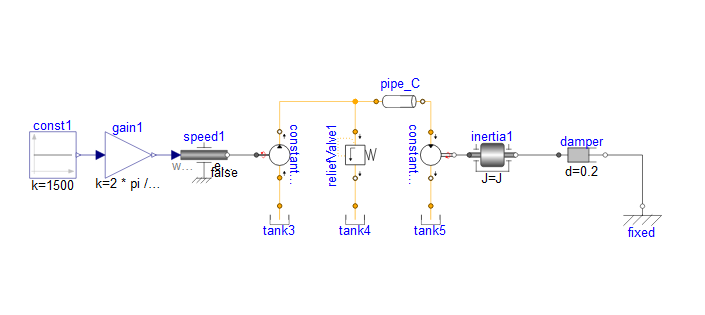
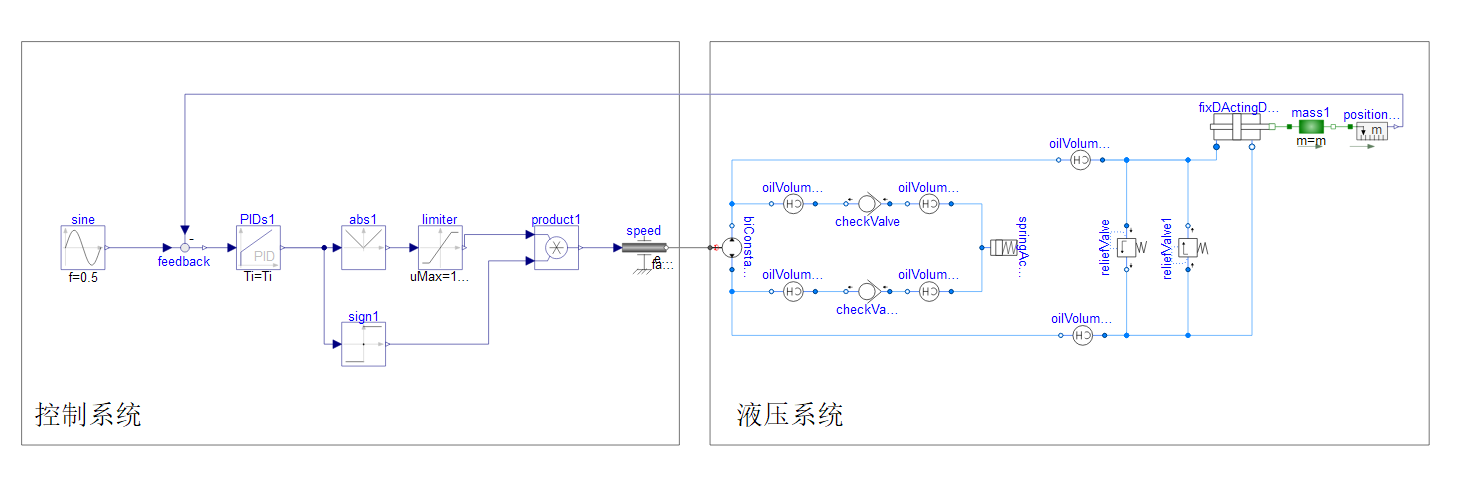
调压系统
压力控制回路是调整或控制液压系统中油液压力的回路,根据目的不同分为调压、减压、增压、保压、泄压、卸荷和平衡等回路。其中调压回路是指控制液压系统或子系统(局部)的压力,使之保持恒定或限制其最高工作压力的液压回路。在该调压系统中主要是调节出口腔的压力。
打开示例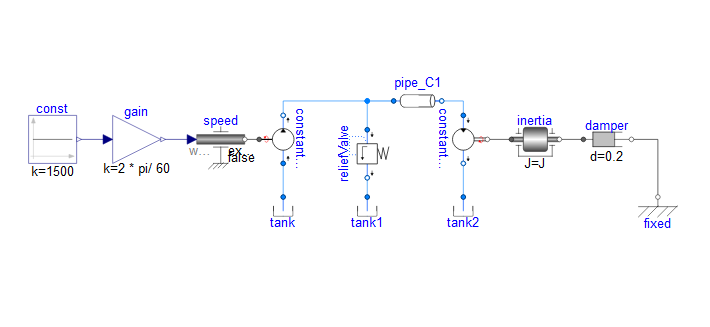
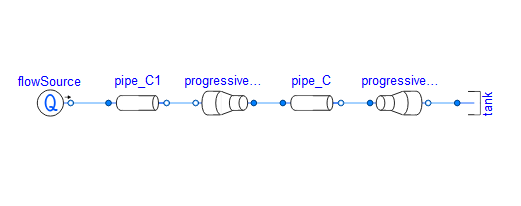
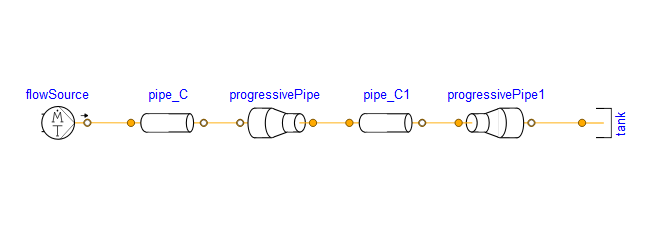
文丘里管
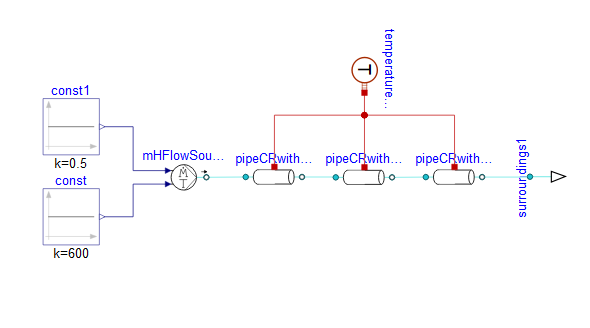
文丘里管是一种流体力学装置,它利用伯努力原理来测量流体的流速或流量。一般它由一个渐缩段(收敛段)、一个喉管(最窄的部分)和一个渐扩段(扩散段)组成。当流体流过文丘里管时,其流速会在喉部达到最大值,而压力则降至最低。
打开示例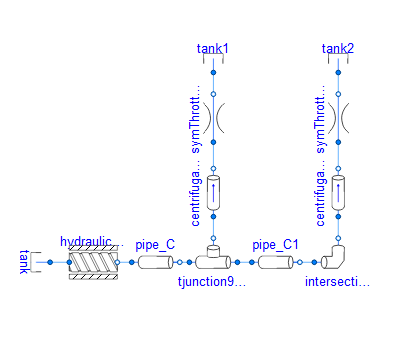
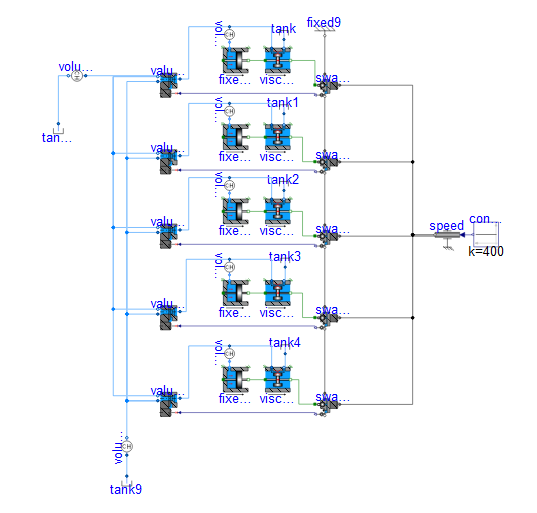
润滑系统
润滑系统是机械设备中不可或缺的部分,其主要功能是减少机械运动部件之间的摩擦,从而降低能量消耗,延长设备的使用寿命,并保障设备的正常运行。其中离心效应润滑系统是一种常见的润滑系统,它利用离心力将润滑油从油箱中抽送到需要润滑的部件表面,以实现对机械设备的有效润滑。
打开示例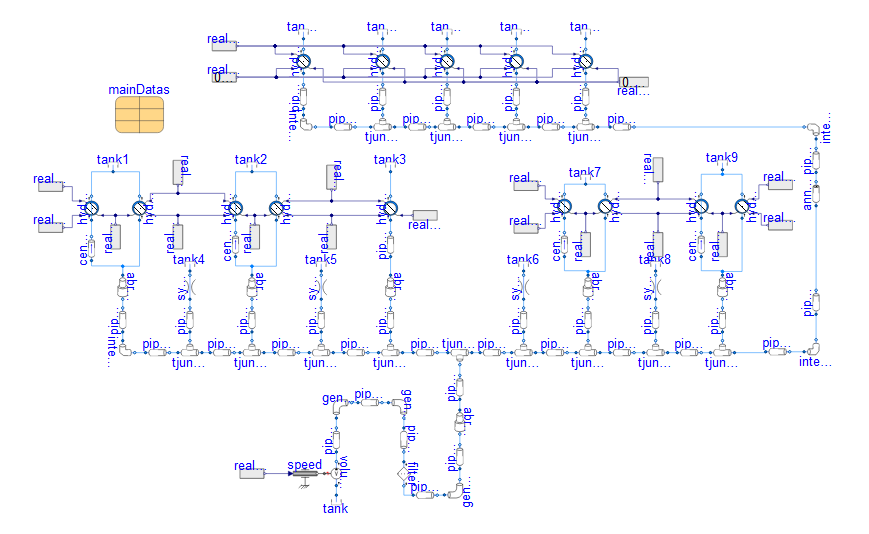
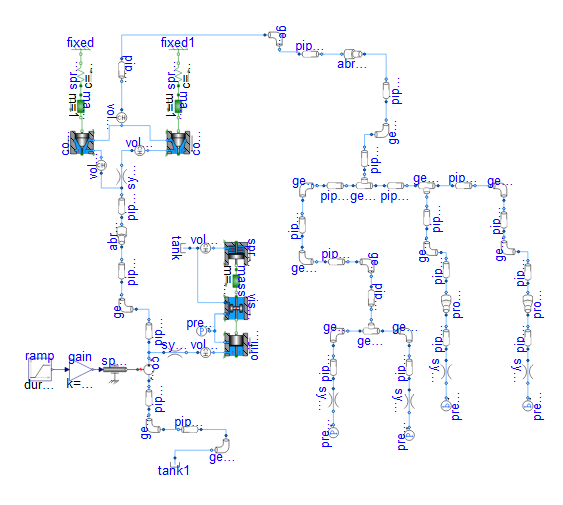
四缸发动机润滑回路
四缸发动机的润滑回路,通过机油泵将过滤后的油液输送至发动机的各个部分,如活塞、曲轴等需要润滑的部分,在润滑过程中,油液承担着润滑、冷却、密封和清洁等多重功能,以保证发动机正常运转并延长其使用寿命。使用过的油液经过回油孔回收至油箱,形成循环利用的润滑系统。
打开示例# 液压元件设计模型
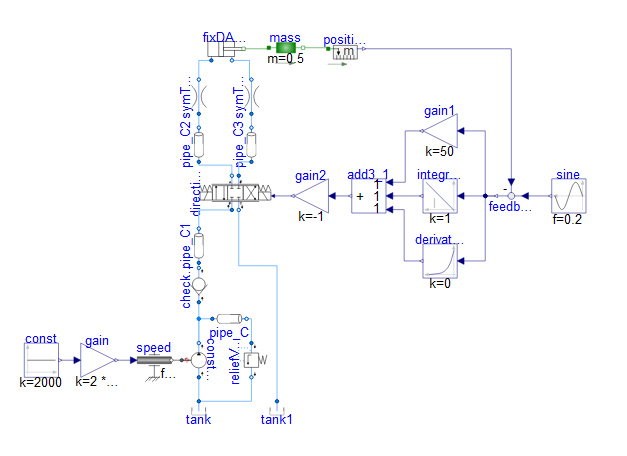
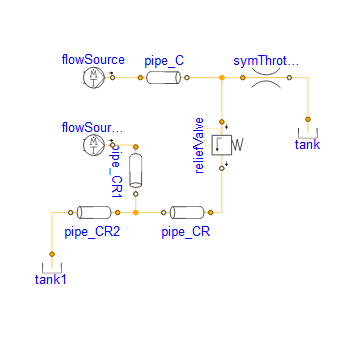
3 通阀回路
三通阀回路是液压系统中一种常见的配置,它利用一个或多个三通阀来控制流体的方向和压力。三通阀具有三个接口或端口,通常标记为 P、A 和 T,用于连接不同的液压管路。这种阀门可以根据需要改变液压油的流向,从而控制执行机构的运动。
打开示例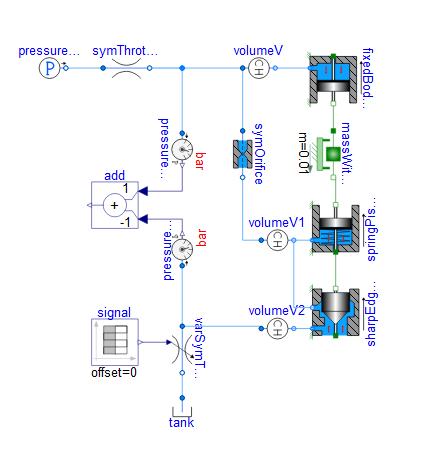
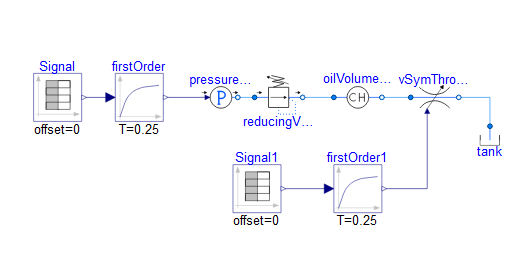
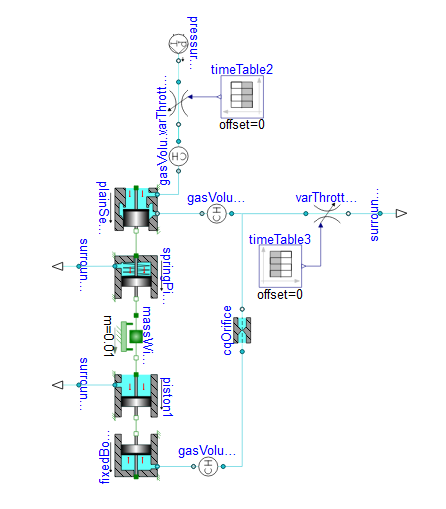
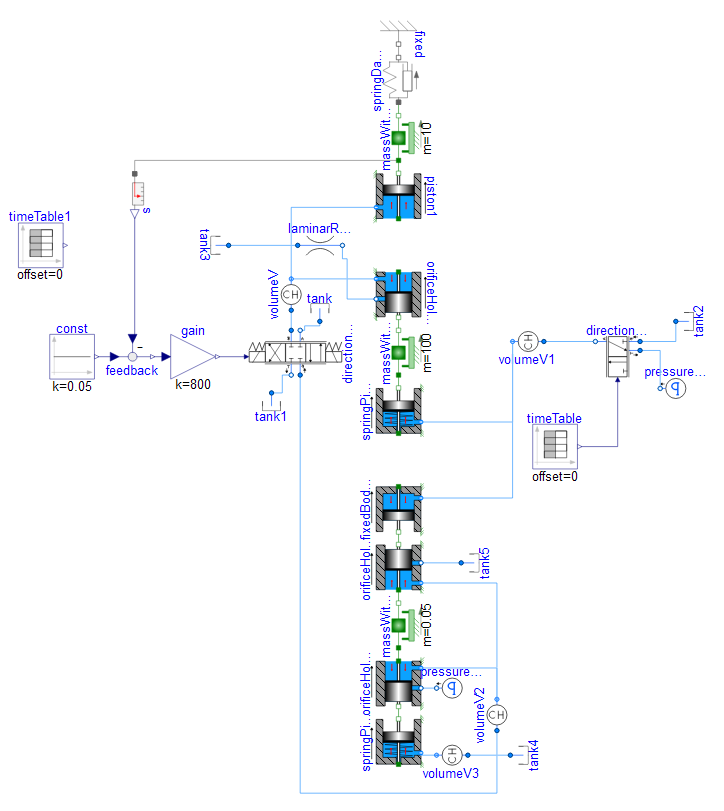
供油系统
基于某型航空发动机滑油供油系统,结合液压供油原理,利用液压元件设计库及液压库快速搭建系统仿真案例,由于供油油滤部分较为复杂,因此通过元件设计库搭建高粒度液压模型,并将其分解成旁通活门、单向活门及滤芯部分,进行不同工况的仿真分析。
打开示例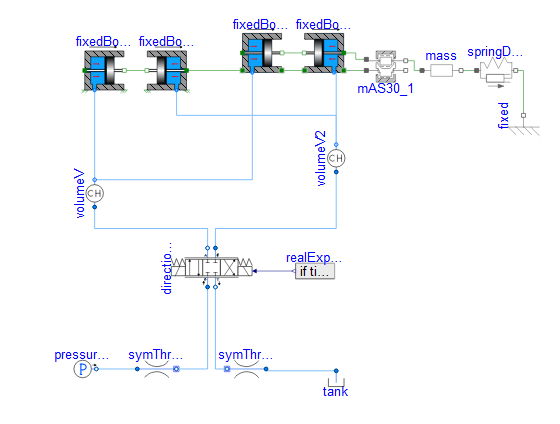
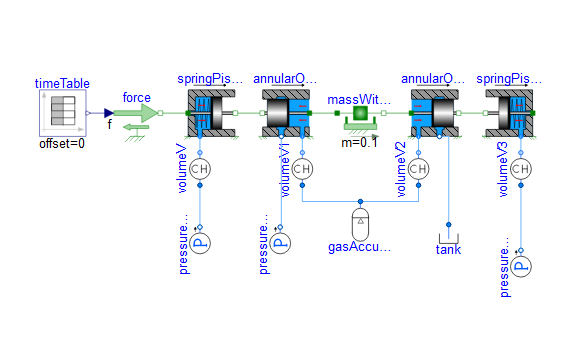
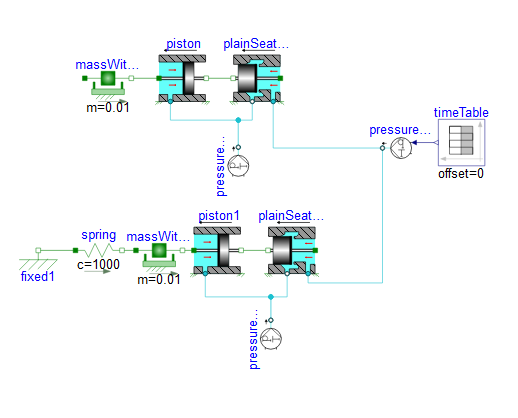
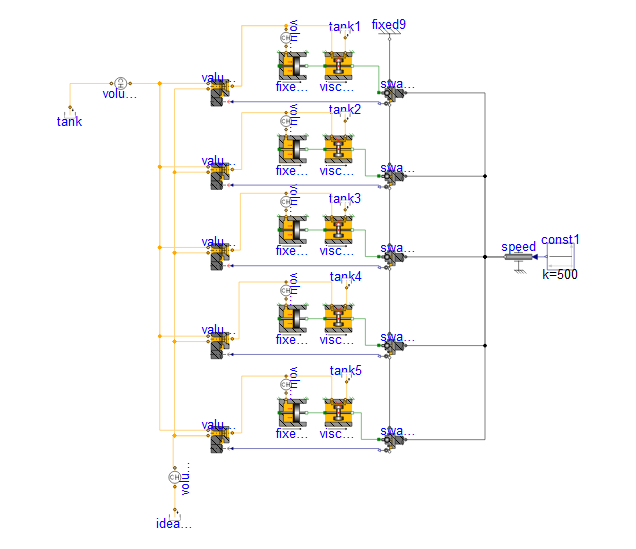
二级液压缸系统
多级液压缸由多个活塞式液压缸套装而成,相比缸体初始长度相同的单级液压缸,提供更大的推力和工作行程,因此多级液压缸被广泛运用于大型起竖设备中。多级液压缸具备结构紧凑、能源利用效率高、适应性高、可靠安全的优点。
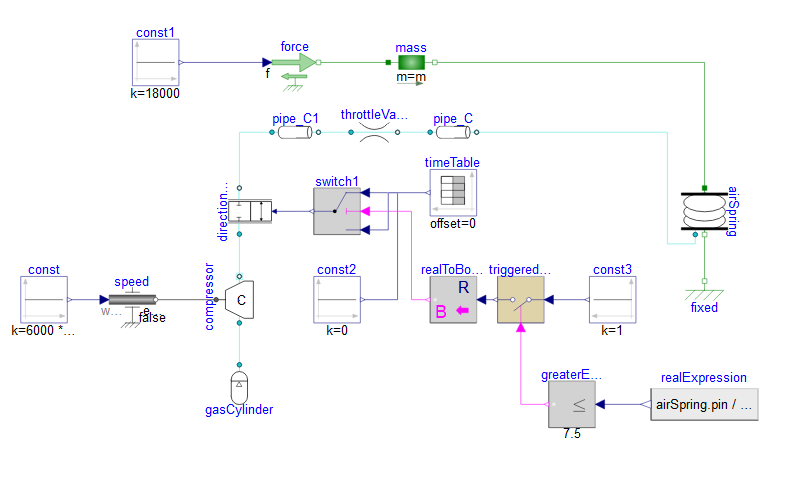
打开示例# 气动模型
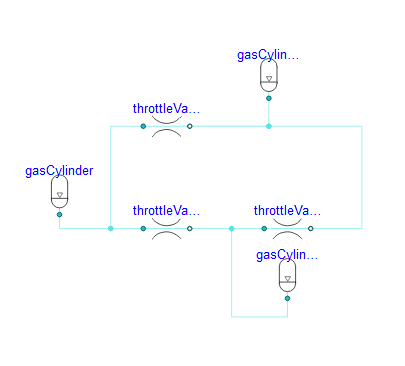
气动回路
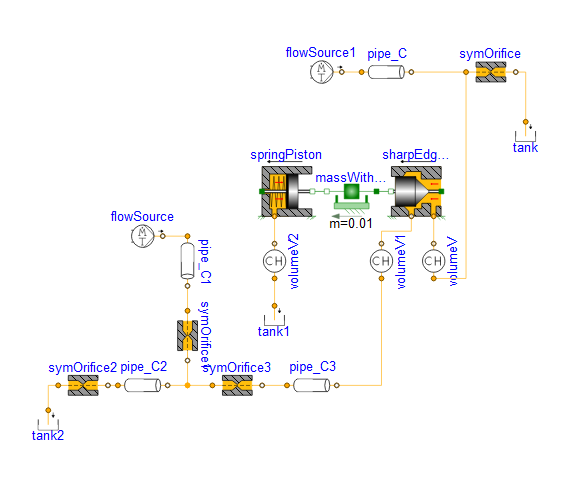
本系统是一个简单的气动系统,系统中包括两个 600L 和 400L 的加压蓄能器,向一个 100L 的蓄能器中排放气体。它们通过 300mm2 和 30mm2 的孔口连接在一起,初始压力分别为 10bar、5bar 和 0bar,温度为 20degC,观察三个蓄能器中压力和温度的演变。
打开示例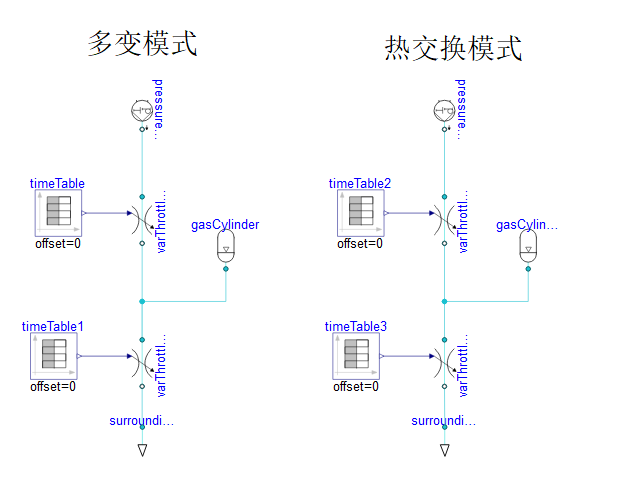
# 气动元件设计模型
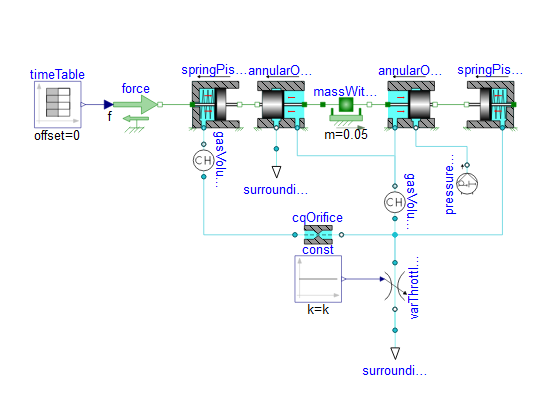
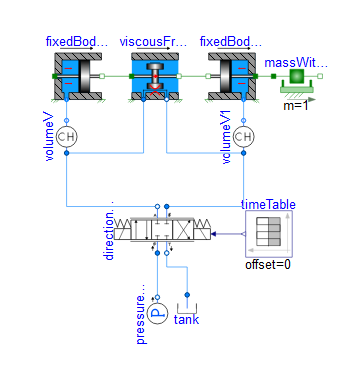
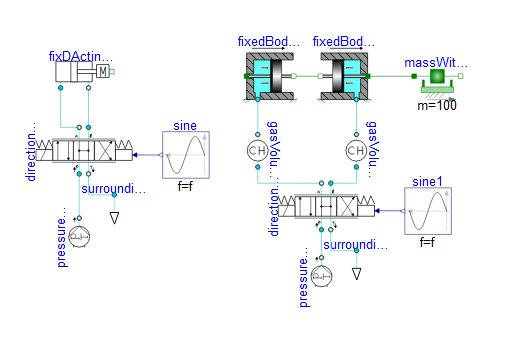
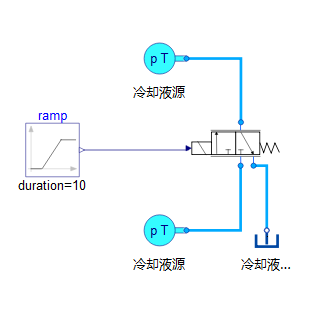
三位三通换向阀
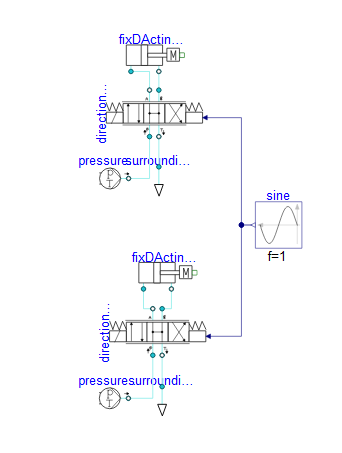
基于气动元件设计模型库,可以搭建一些高粒度气动模型,以三位三通换向阀为例,通过调整驱动力大小、阀芯结构参数、弹簧刚度、初始阀芯位置及节流孔直径等,实现阀芯换向,并将获得的结构参数用于指导换向阀的设计与制造。
打开示例
# 热液压模型

文丘里管
文丘里管是一种流体力学装置,它利用伯努力原理来测量流体的流速或流量。一般它由一个渐缩段(收敛段)、一个喉管(最窄的部分)和一个渐扩段(扩散段)组成。当流体流过文丘里管时,其流速会在喉部达到最大值,而压力则降至最低。
打开示例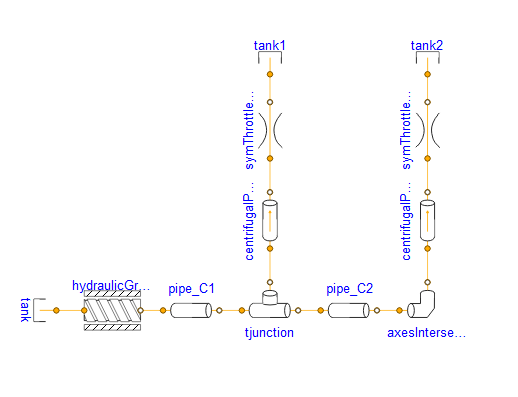
润滑系统
润滑系统是机械设备中不可或缺的部分,其主要功能是减少机械运动部件之间的摩擦,从而降低能量消耗,延长设备的使用寿命,并保障设备的正常运行。其中离心效应润滑系统是一种常见的润滑系统,它利用离心力将润滑油从油箱中抽送到需要润滑的部件表面,以实现对机械设备的有效润滑。
打开示例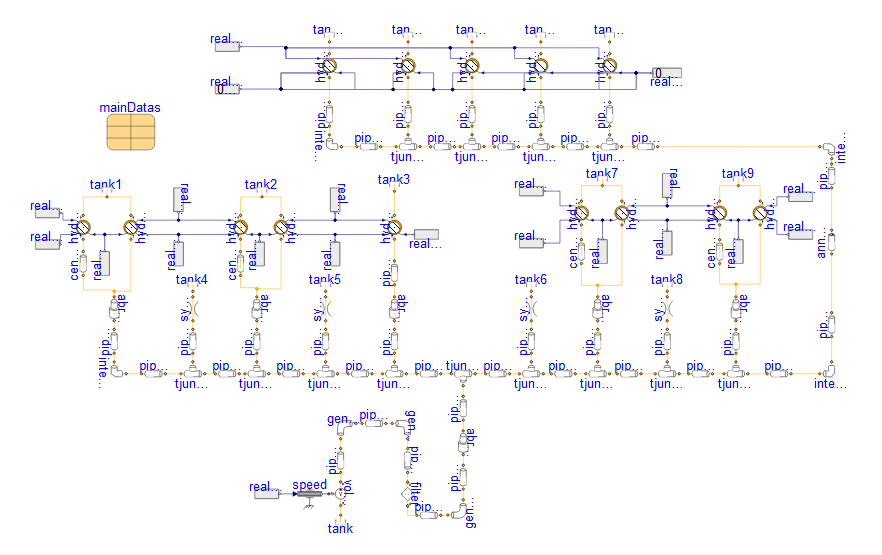
四缸发动机润滑回路
四缸发动机润滑回路,通过机油泵将过滤后的油液输送至发动机的各个部分,如活塞、曲轴等需要润滑的部分,在润滑过程中,油液承担着润滑、冷却、密封和清洁等多重功能,以保证发动机正常运转并延长其使用寿命。使用过的油液经过回油孔回收至油箱,形成循环利用的润滑系统。
打开示例# 热液压元件设计模型
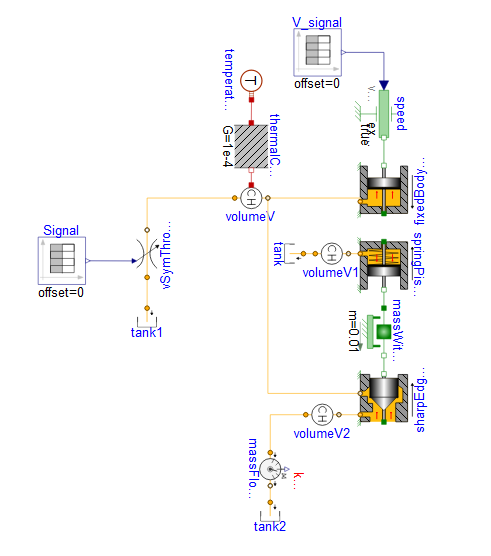
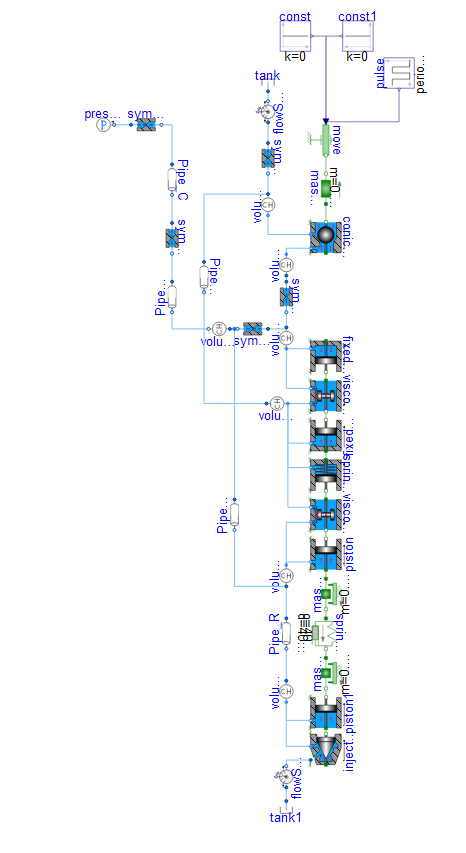
高压油喷射器
高压油喷射器由喷油嘴、喷油阀、喷油泵、压力调节器等组件组成。喷油嘴负责将高压柴油喷射到缸体中,喷油阀用于控制喷油的时间和量,喷油泵提供高压柴油,压力调节器用于调节喷油系统的压力。
打开示例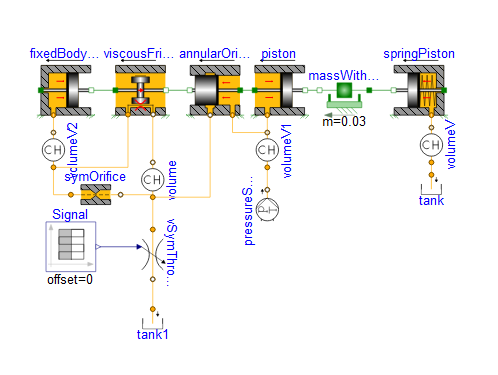
# 热模型
热管理系统
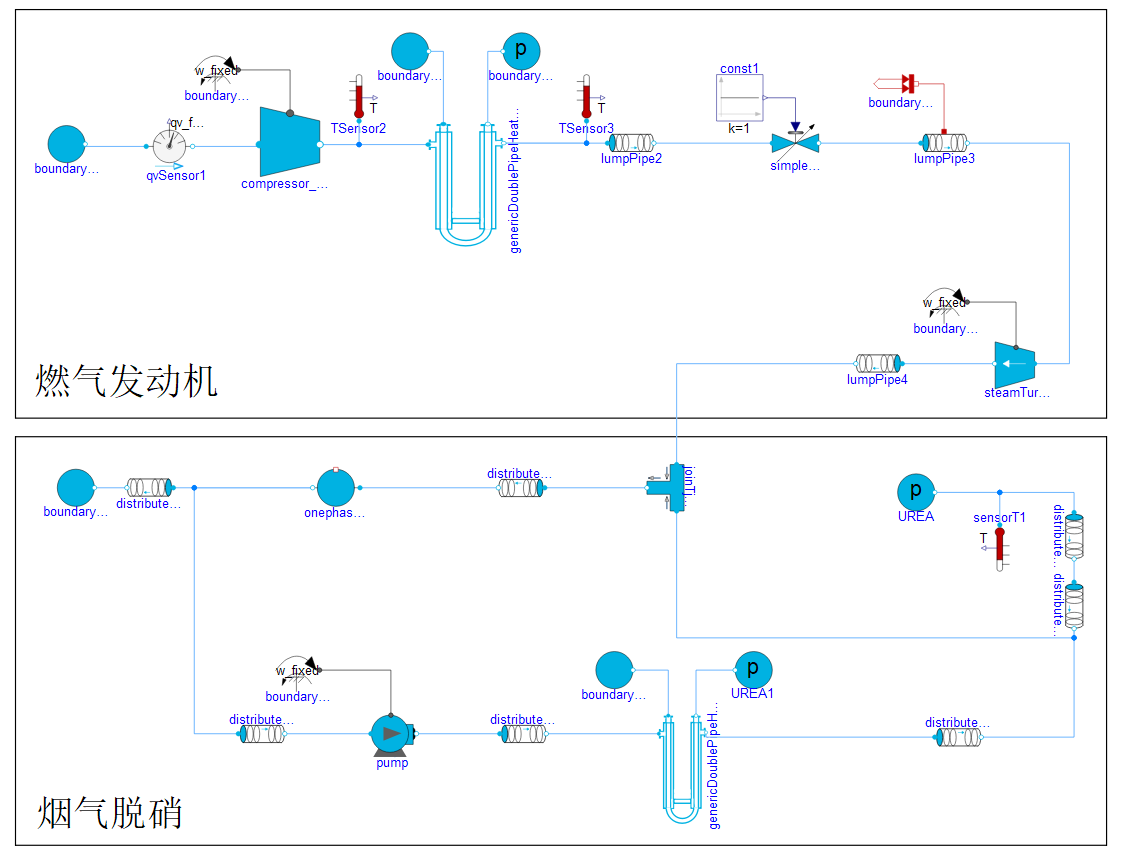
热管理系统为根据航空发动机燃油热管理系统进行搭建的简化版仿真系统,在该系统中对燃油部分进行了简化并且在仿真模型中考虑了环境温度的影响。在该系统中介质选用与 3 号喷气燃料特性基本一致的燃油介质 jetA,模拟燃油温度随时间的变化规律。
打开示例
# 基础热流体模型
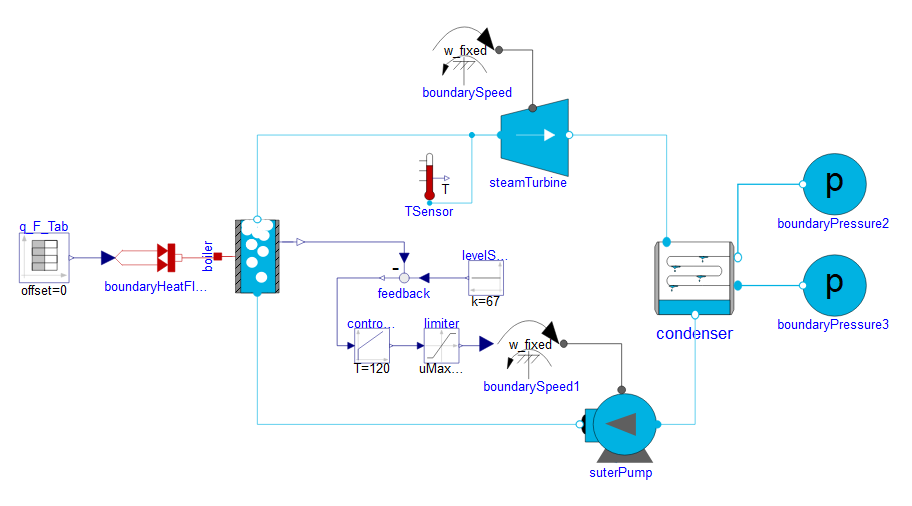
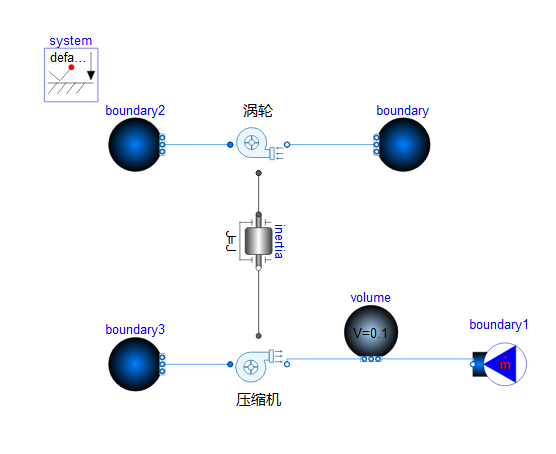
蒸汽动力循环系统
蒸汽动力循环的主要原理为水在水泵中被压缩升压,然后经蒸发器被加热汽化,变为过热蒸汽后进入汽轮机膨胀作功,作功后的低压蒸汽进入冷凝器被冷凝结为水,再回到水泵中,完成一个循环。
打开示例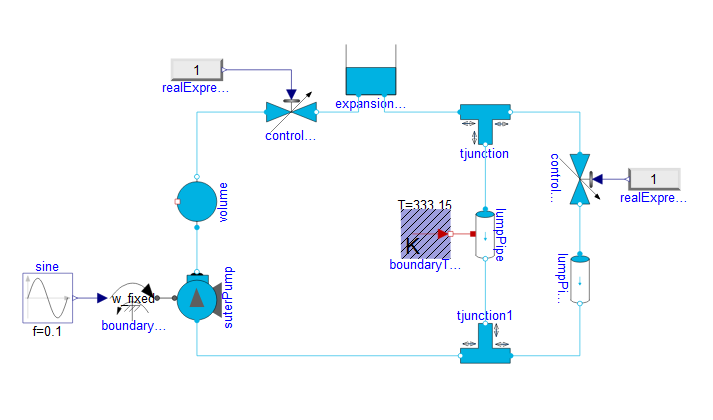
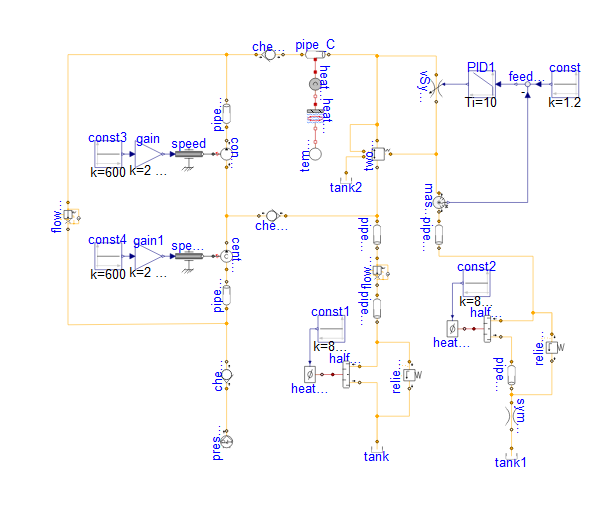
二回路系统
二回路系统的主要工作流程为凝结水经套管式换热器(蒸汽发生器)与一次侧流体进行换热,吸收热量后变为蒸汽后进入各汽轮机作功,进而带动泵和发电机的运行,汽轮机出口蒸汽进入冷凝器,凝结为水后经泵升压,再次进入换热器,实现循环。
打开示例# 空气处理与通风模型
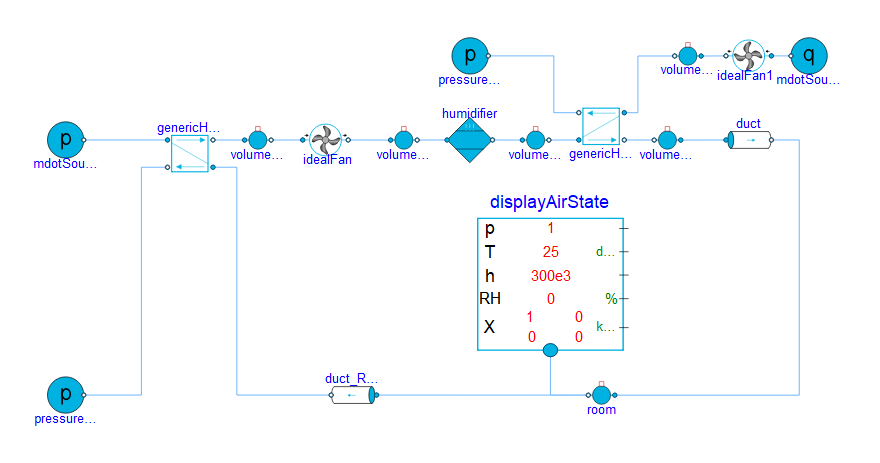
循环复合系统
循环复合系统中从外界进入屋内的冷空气需要经历两次加热过程,第一次加热的能量来自即将排出屋外的热气流,通过这种热回收的方式可节省一部分能量;后经加湿器加湿后由热源进一步加热至舒适的温度。
打开示例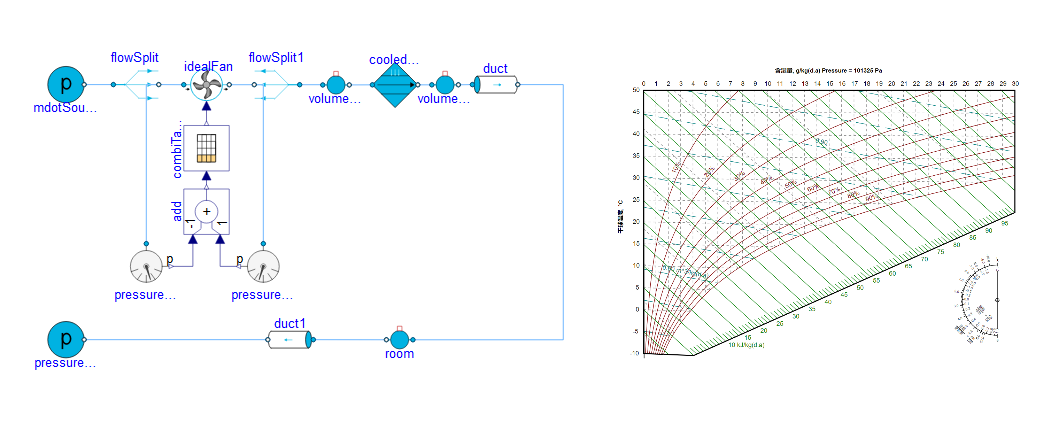
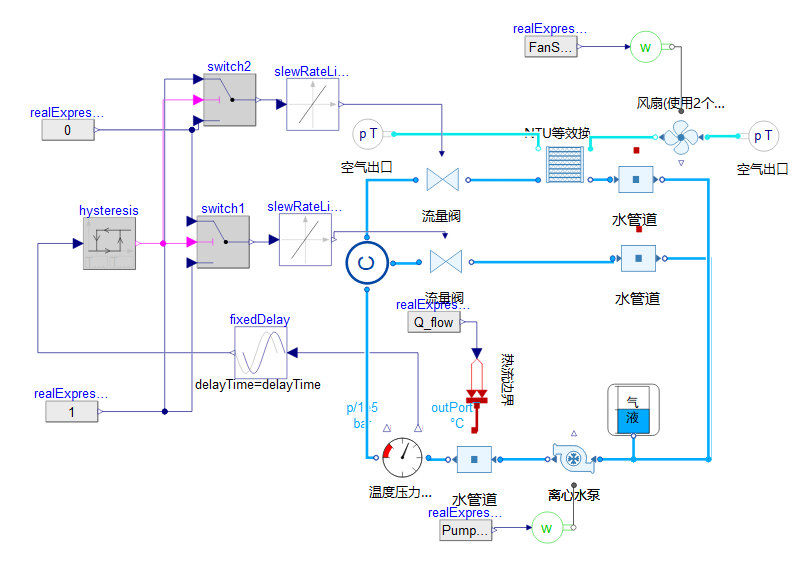
通风系统
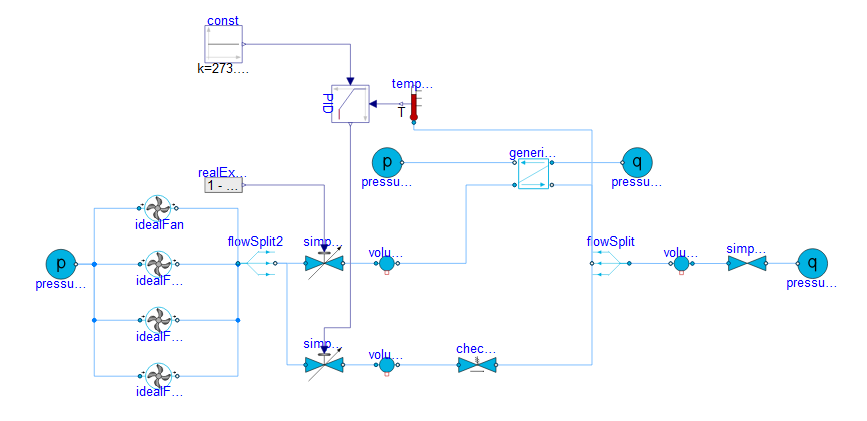
通风系统在确保室内空气质量、舒适度和健康方面具有重要作用,不同类型的建筑和环境需要根据需要选择合适的通风系统。机械通风系统中空气在风扇驱动下进行流通,同时为保证新风处于舒适的温度需要使用换热器和温度控制阀进行温度调控。
打开示例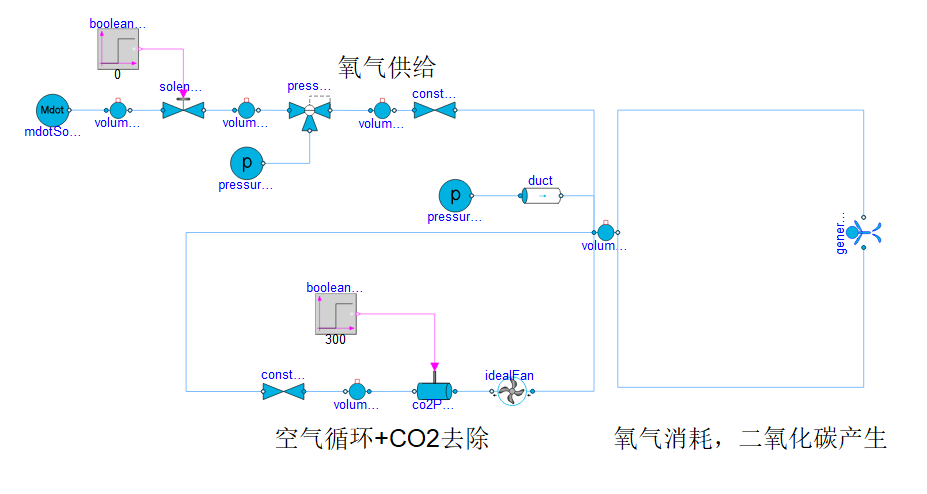
# 电气专业模型库
提示
单击打开示例后,可能会出现图形视图显示异常的情况,原因是未加载对应的模型库。此时单击主页工具栏检查按钮,会自动加载对应的模型库,通过检查后模型会正常展示。
# 基础电气模型库
单元示例
平均值三相逆变器示例
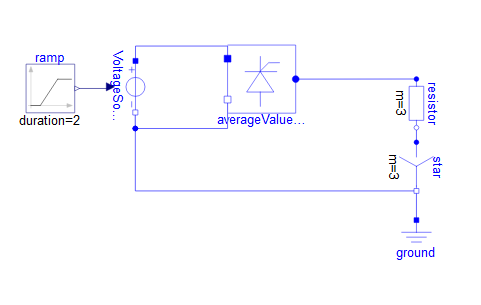
平均值三相逆变器将直流电转换为交流电,因此需要输入直流电,根据变换的比值,对应计算输出的交流电。当输入电压大于导通直流电压时,逆变器才会工作,而当输入的电压小于关断直流电压时,逆变器则会停止工作。
打开示例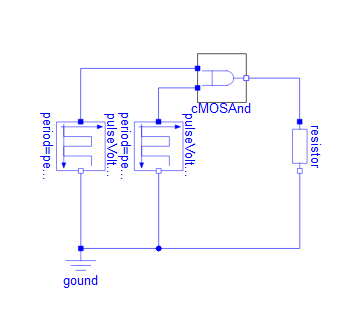
CMOS 与门示例
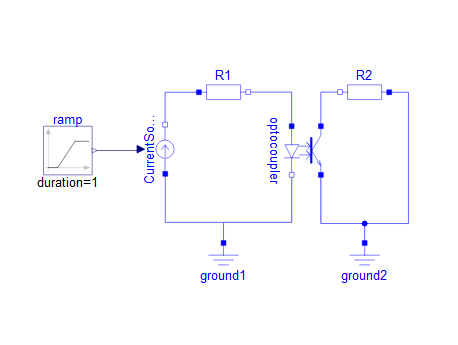
CMOS 与门逻辑为:两个接口都为 1 时,输出为高,和基本的与门逻辑一致,不过输出一次电路采用 RC 电路,二次电路采用 CMOS 电路作为输出电路,测例电路为一次电路输出。
打开示例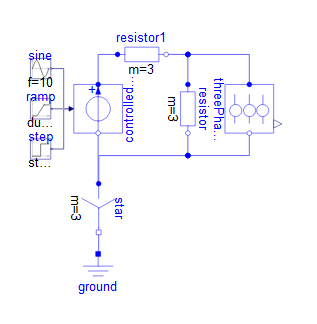
集成示例
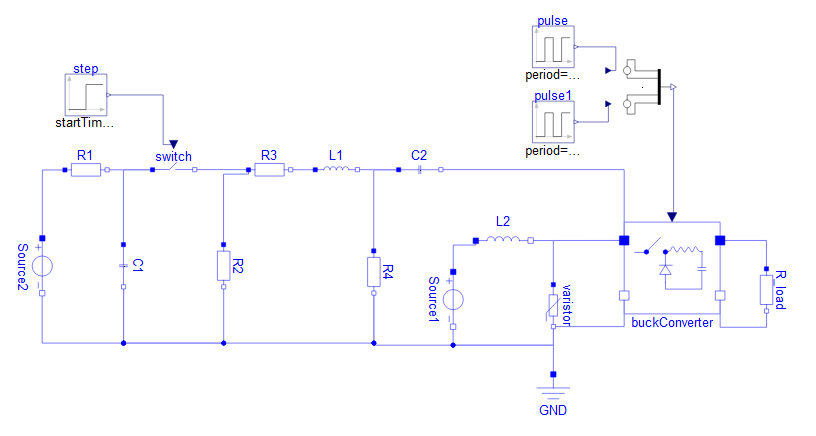
浪涌保护降压变换电路
变换电路是调整或控制电路中的电压等级,根据目的不同又分为降压、升压、逆变、整流等电路。其中降压电路是指将输入电压降低到所需要等级的电路。浪涌保护可以让电路免受由于差动浪涌所引起的过电压损伤。
打开示例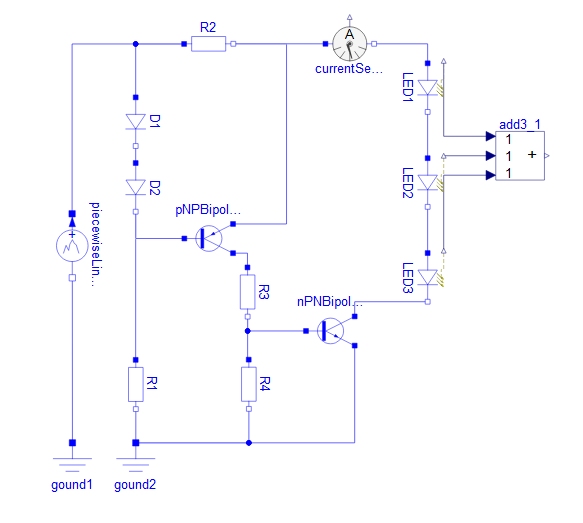
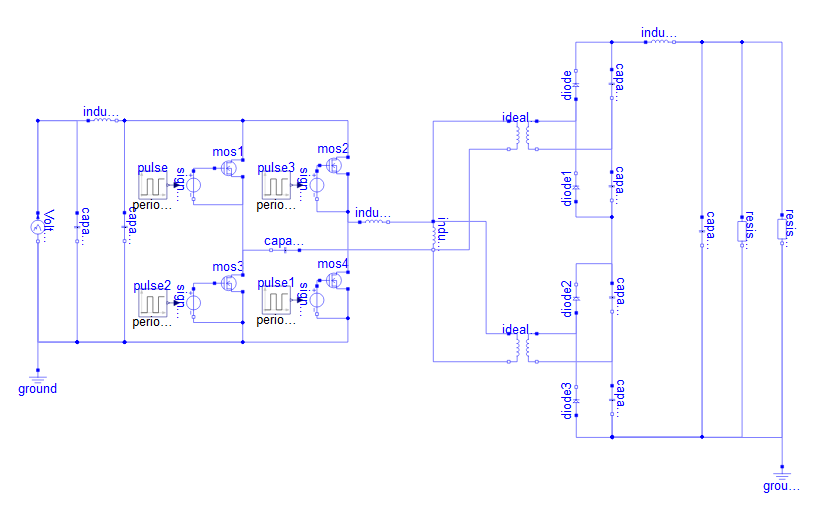
全桥 LLC 电路
全桥电路是一种常见的电力电子电路,主要用于实现直流到直流(DC-DC)转换或交流到直流(AC-DC)转换。LLC 电路是一种用于将直流电压转换为另一种直流电压的电源变换电路。
打开示例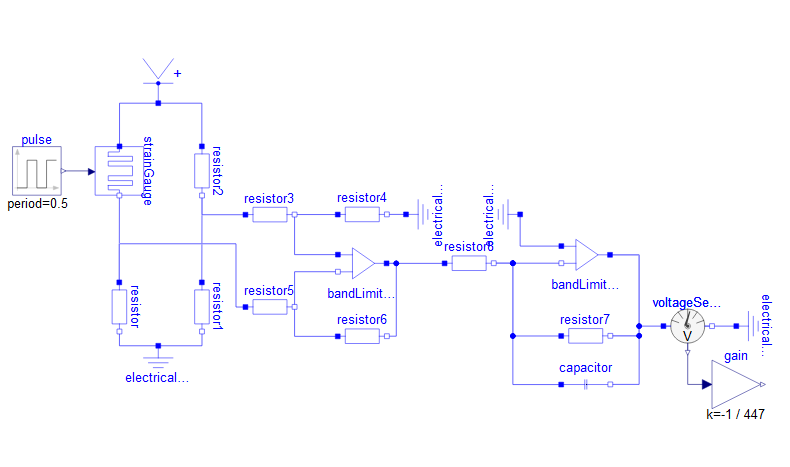
应变片测量电路
应变片一种用于测量物体变形的传感器,它会随着物体的变形而改变其电阻。应变片测量电路由惠斯通电桥,差分放大电路和低通滤波电路组成。惠斯通电桥用来测定应变片电阻的相对变化,差分放大电路用于放大惠斯通电桥的信号,低通滤波电路用于去除高频噪声。
打开示例
# 电机模型库
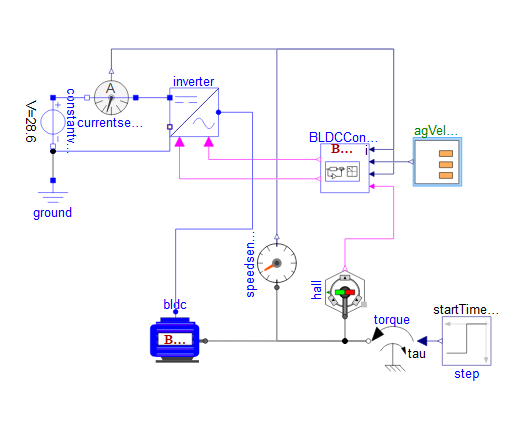
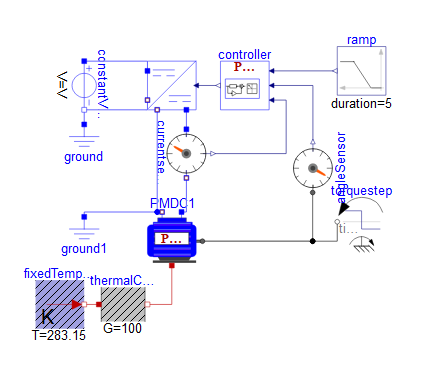
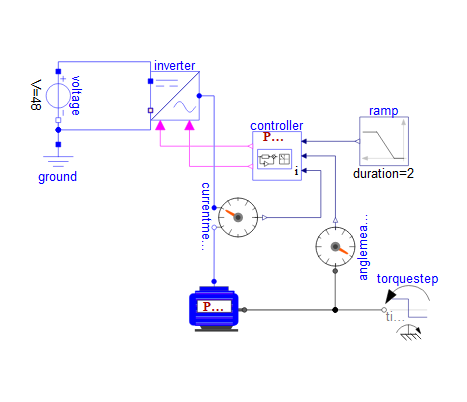
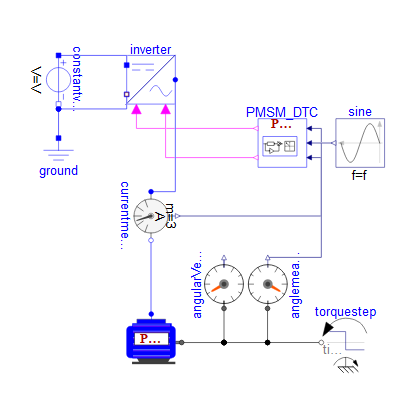
永磁同步电机示例,开关电路型
该示例为永磁同步电机的一种应用案例,在特定输入电压下,通过 PWM 信号驱动的磁场定向控制器来控制逆变器的通断,使电机获得理想的电压输入,并模拟电机的工作特性。
打开示例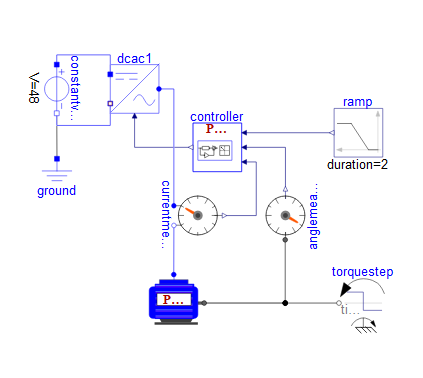
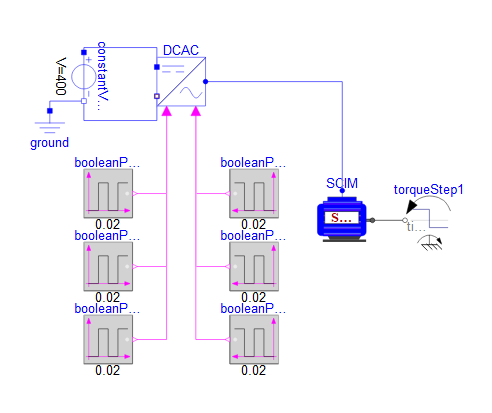
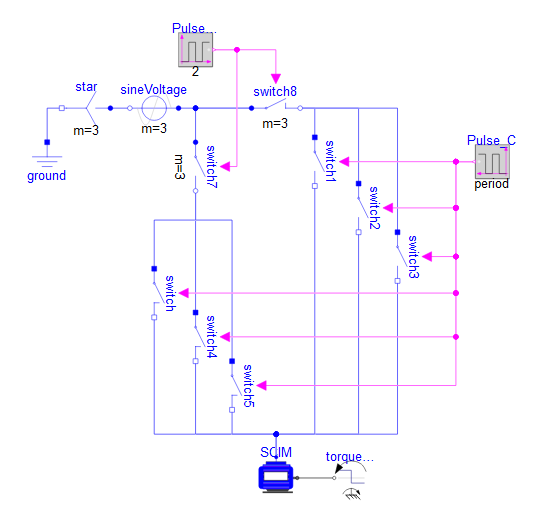
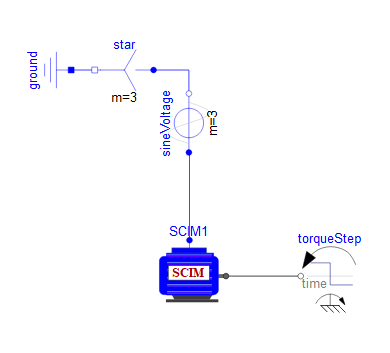
三相异步电机的正反转控制示例
该示例为三相异步电机的一种应用案例,通过开关与脉冲信号模拟线圈得电控制电机运转。利用理想常闭开关与理想常开开关在同一脉冲信号作用下不同的导通情况模拟电机正转与反转的切换,在此种模式下,模拟三相异步电机正反转控制时的输出特性。
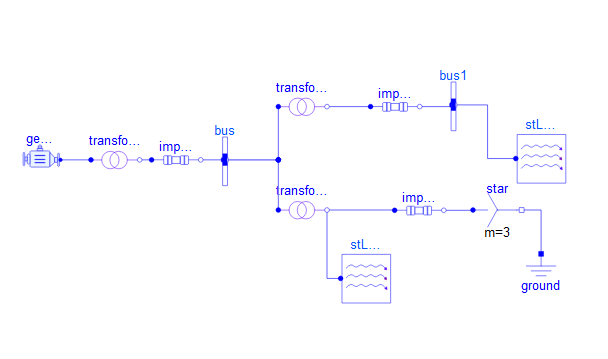
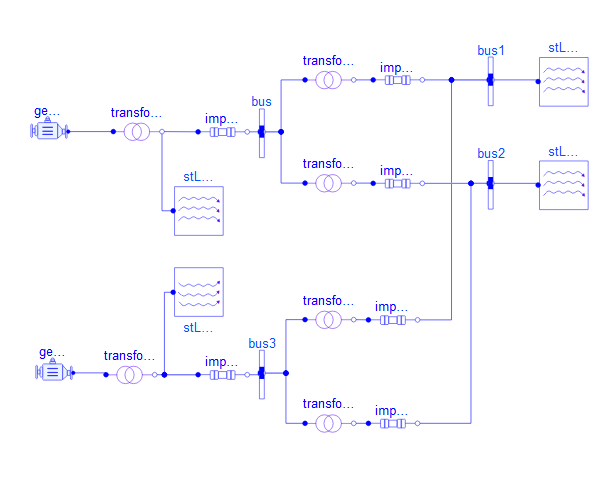
打开示例# 电力系统模型库
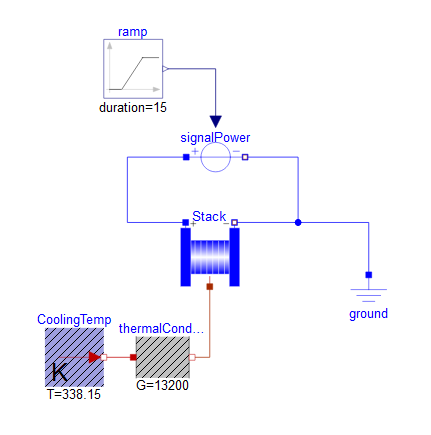
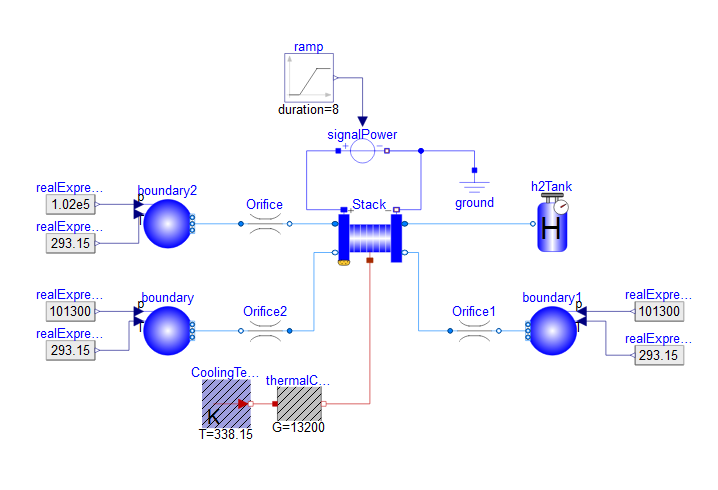
# 燃料电池模型库
# 车辆行业模型库
提示
单击打开示例后,可能会出现图形视图显示异常的情况,原因是未加载对应的模型库。此时单击主页工具栏检查按钮,会自动加载对应的模型库,通过检查后模型会正常展示。
# 车辆动力学模型库
不同测试工况
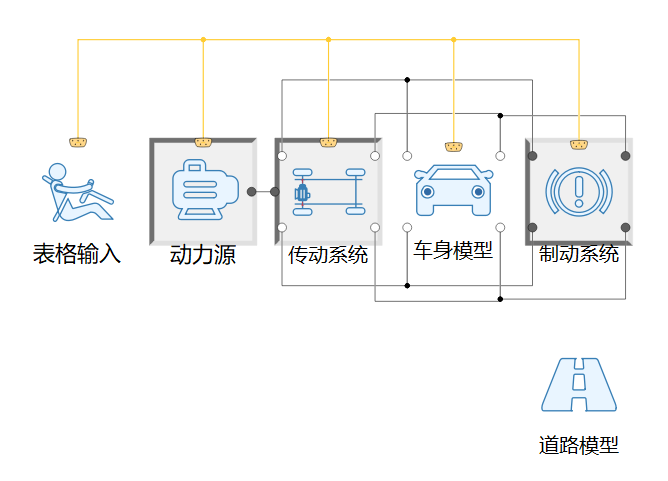
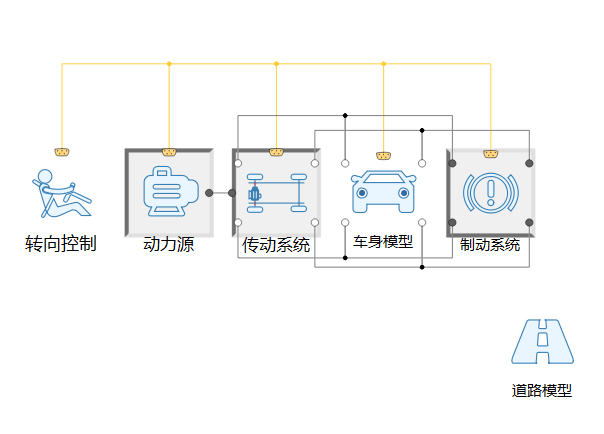
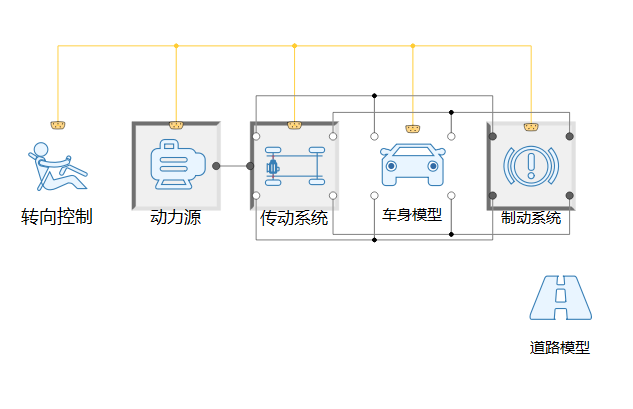
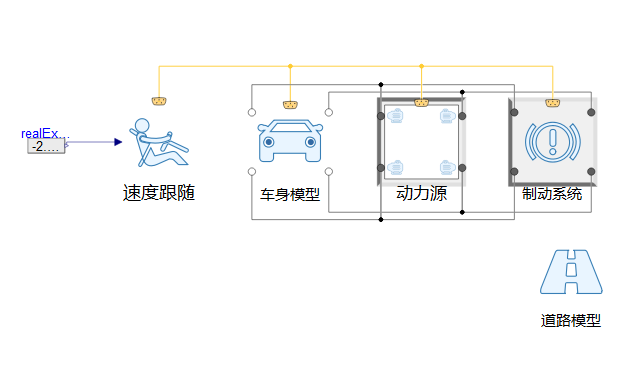
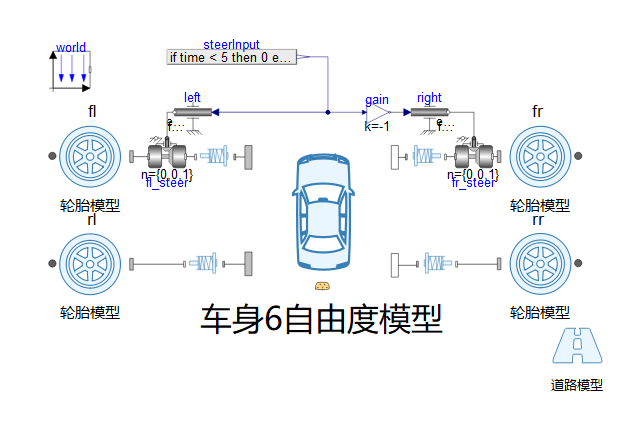
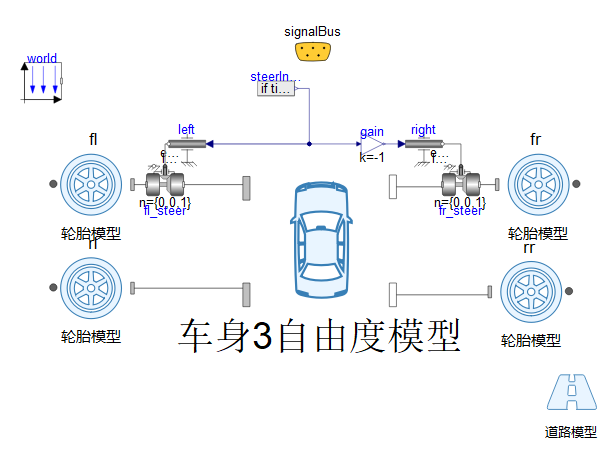
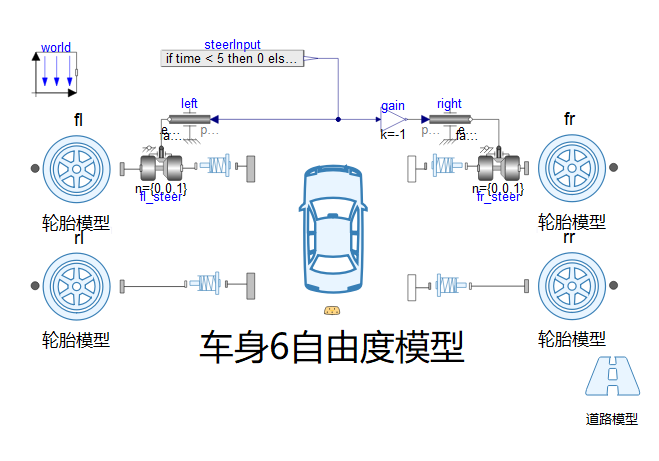
一些常用自由度的整车模型
导出成 FMU 模型
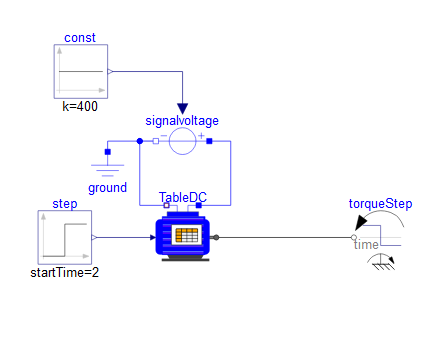
输入驱动扭矩
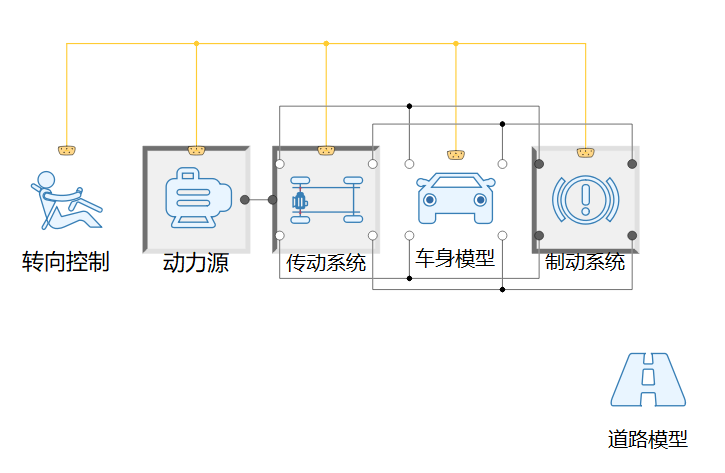
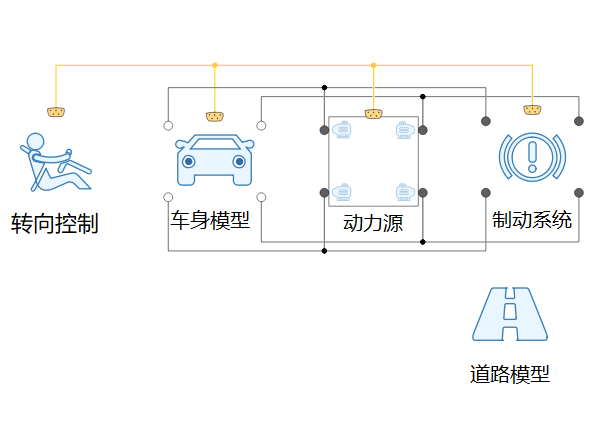
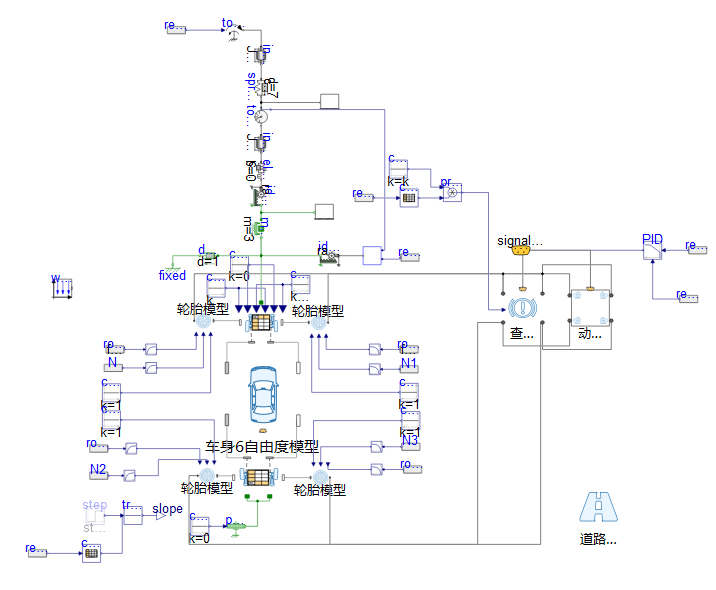
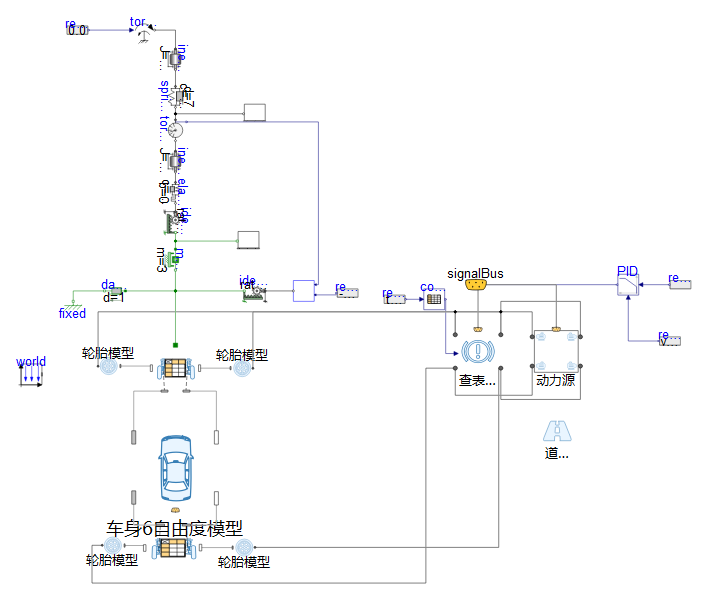
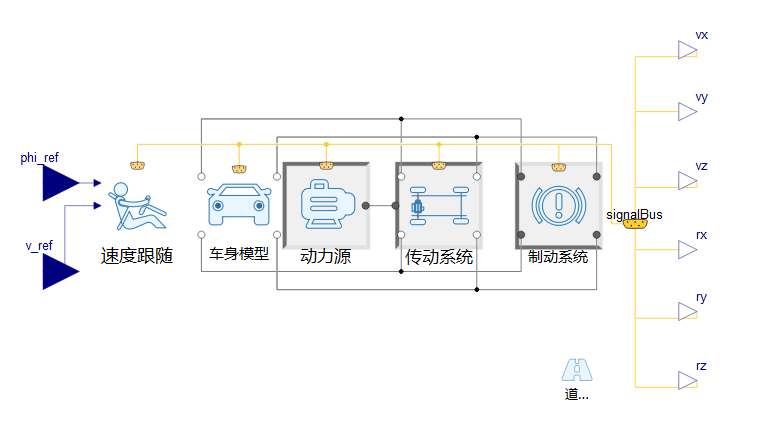
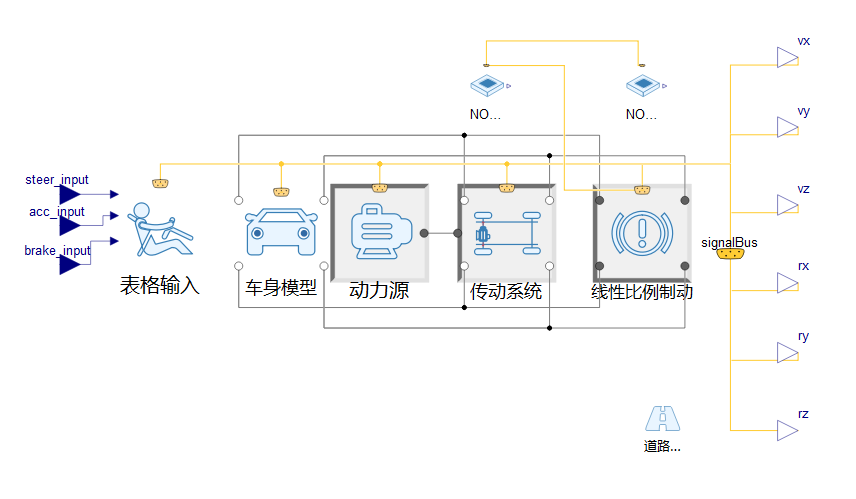
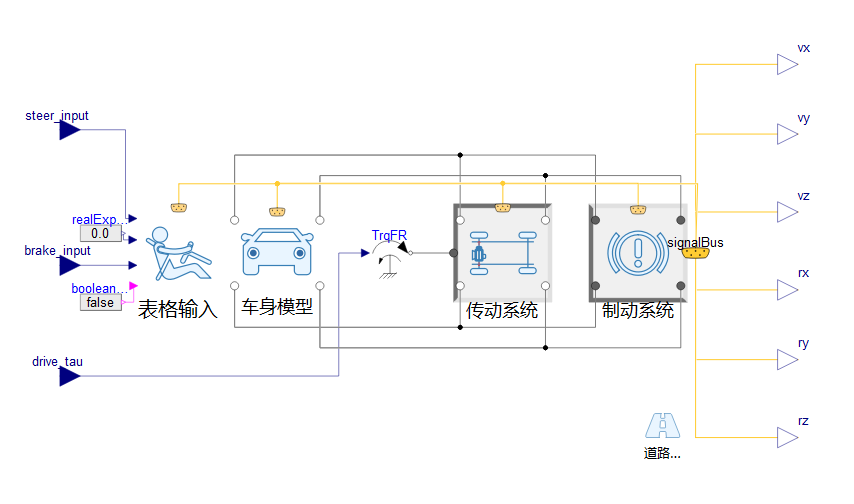
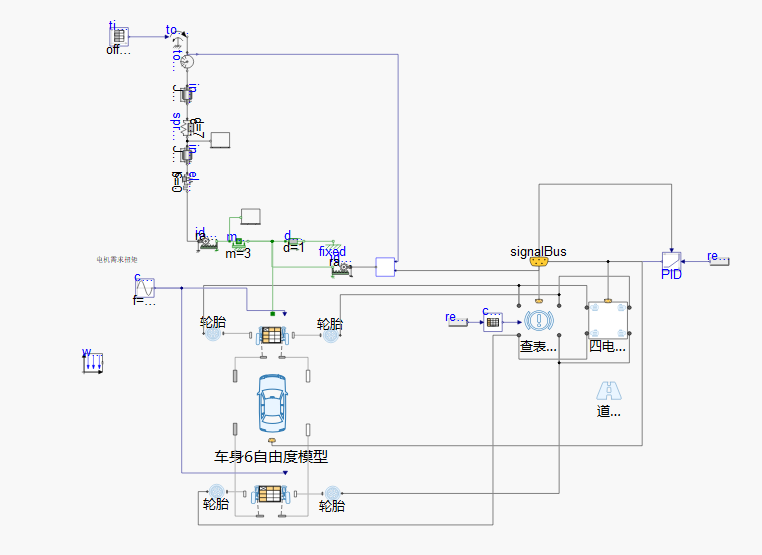
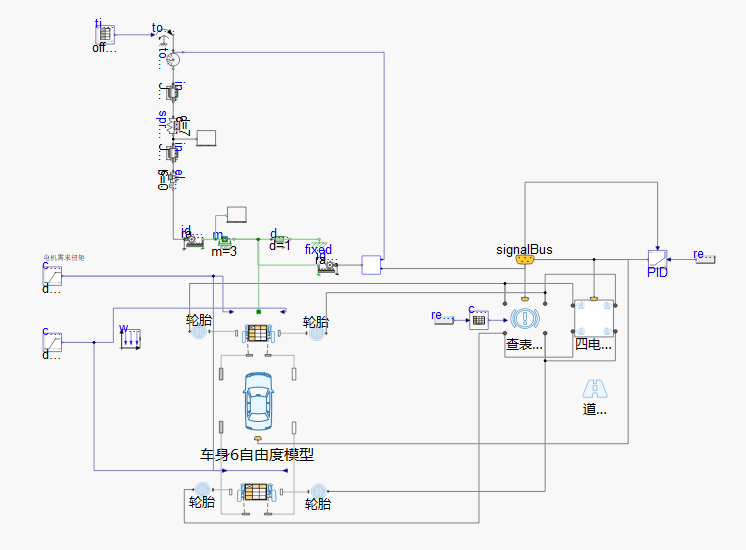
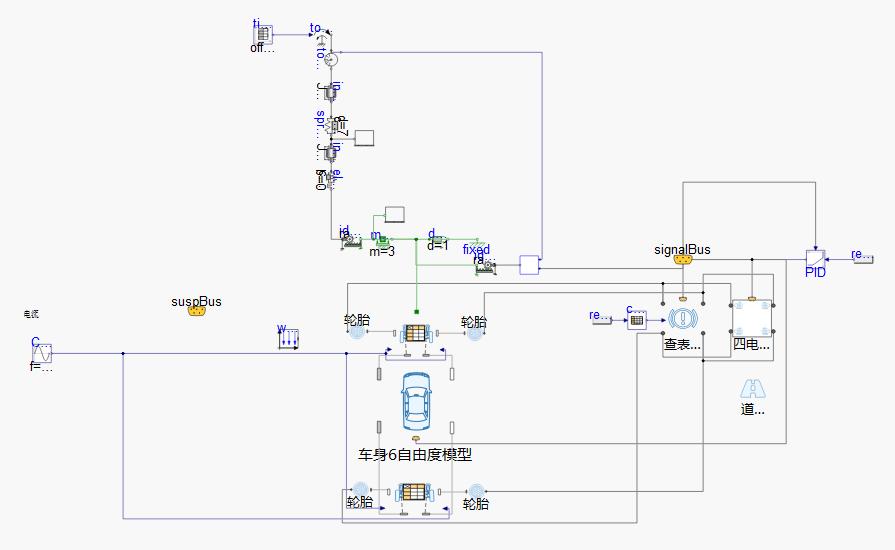
该模型采用表格输入模块连接转向和制动两个接口,通过力矩模块直接向传动系统输入驱动力矩,在总线中连接 x,y,z 三向位移和三向角度接口,在运行后可生成 FMU 模块与其他模型进行连接。
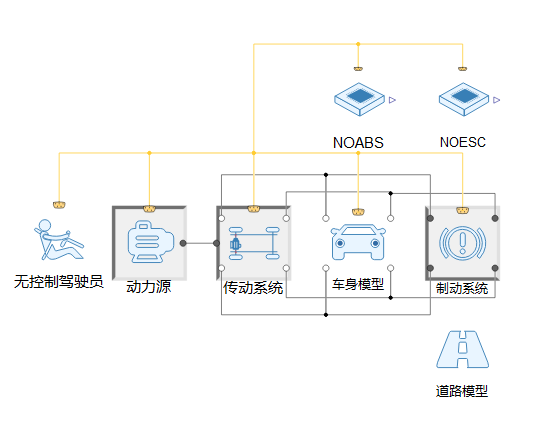
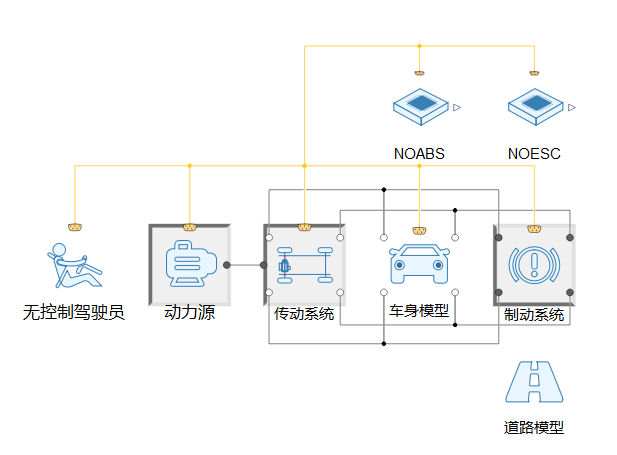
打开示例GB6323 2014 中定义的部分测试工况
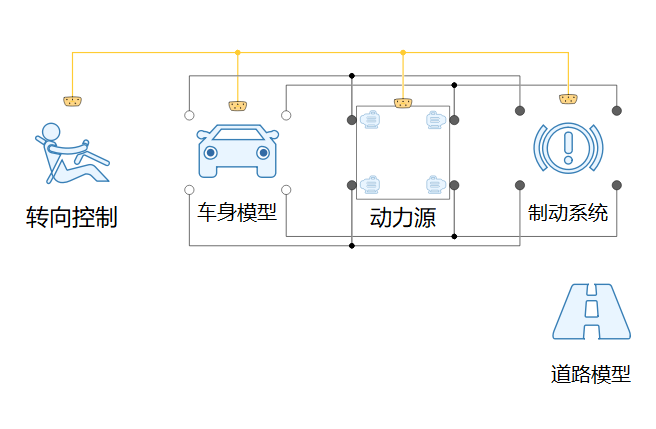
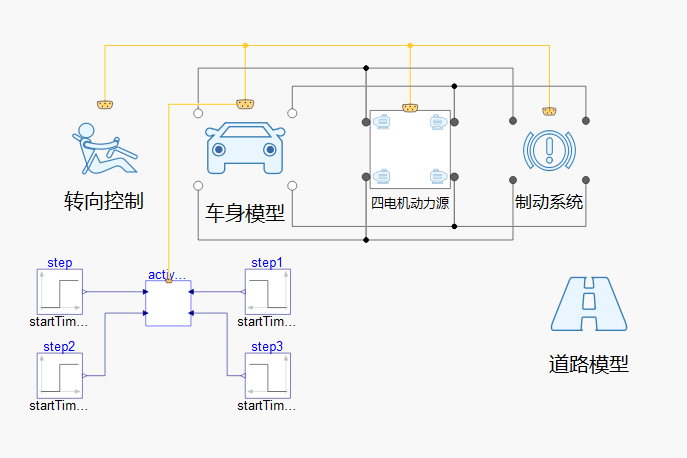
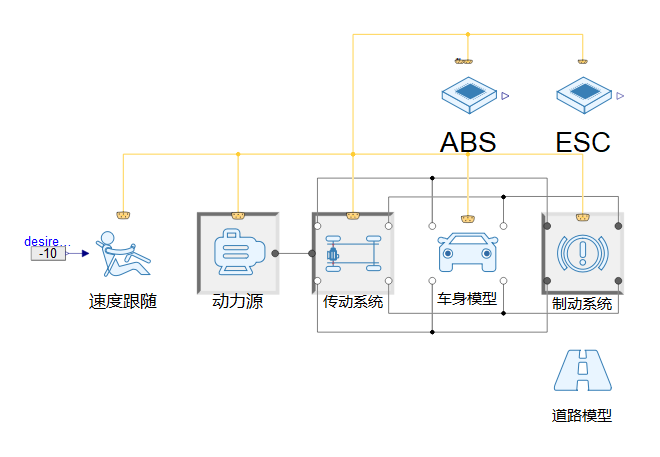
智能底盘案例
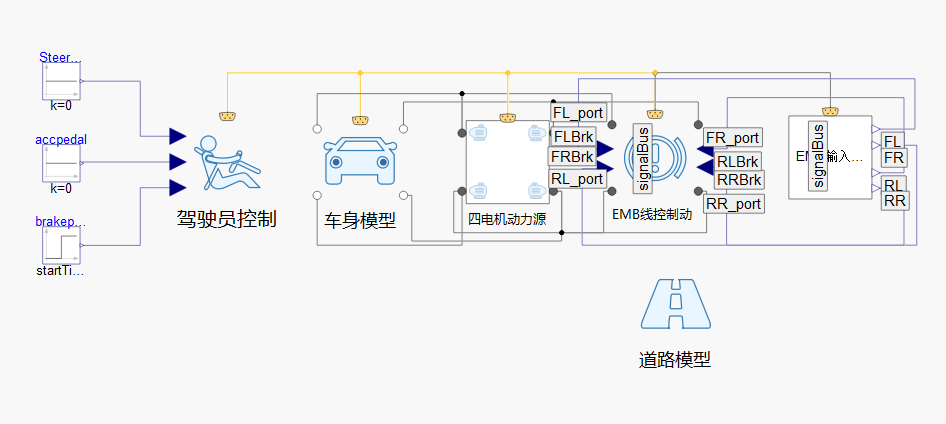
线控转向案例
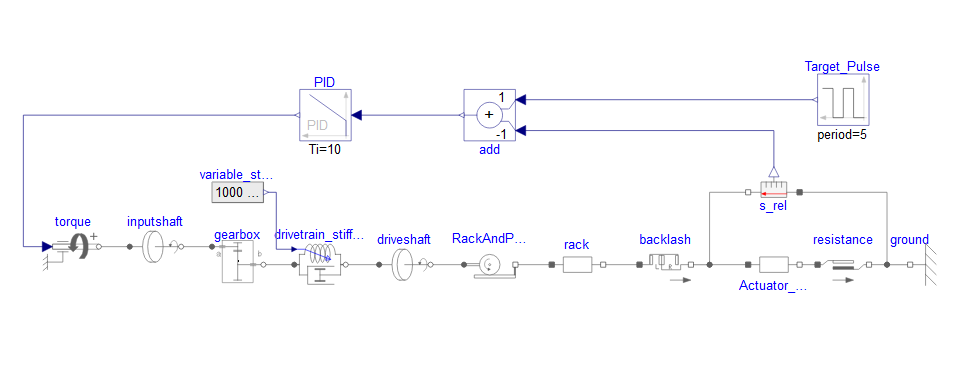
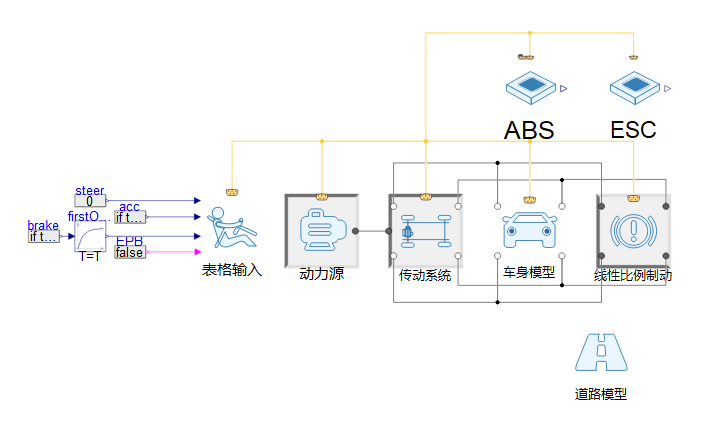
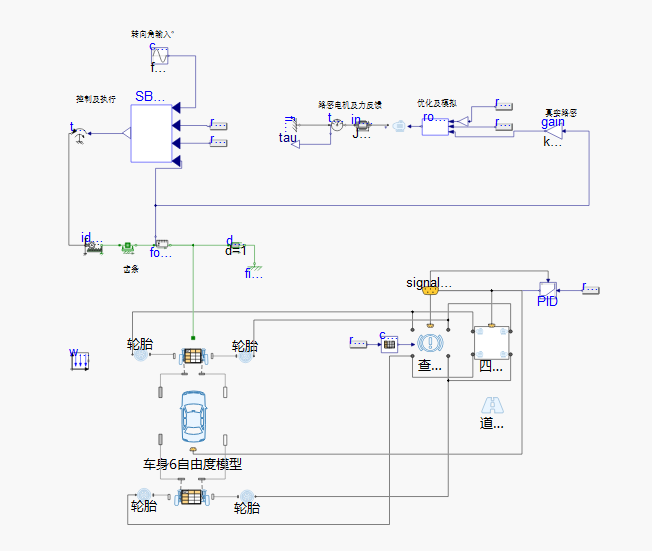
线控转向案例,线控转向由方向盘转角输入模块,SBW 控制模块,执行机构,路感反馈机构组成;SBW_Control 模块根据目标转角和车轮实际转角输出小齿轮扭矩;路感反馈机构接收齿条真实扭矩,通过优化模拟模块处理后生成方向盘扭矩。
打开示例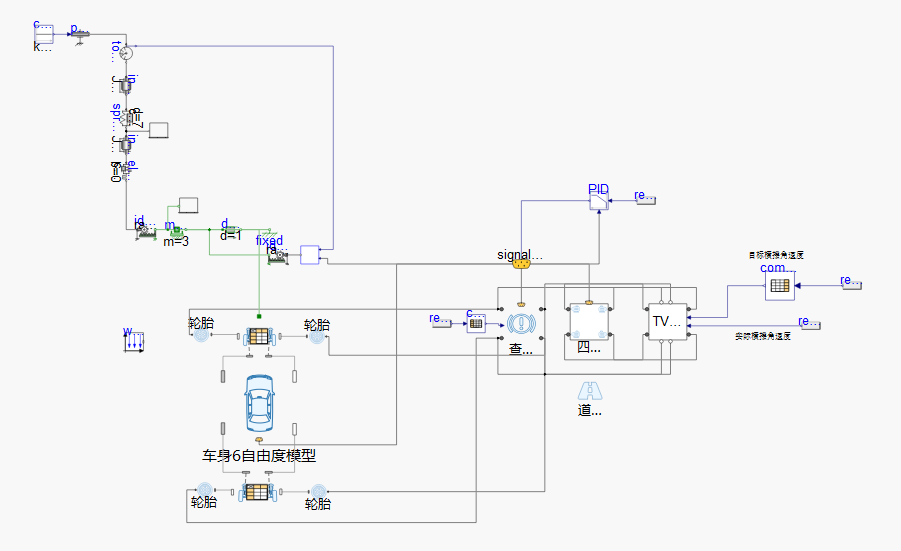
# 车辆动力性经济性模型库
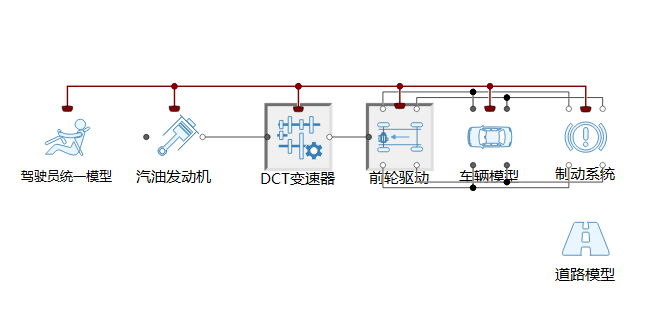
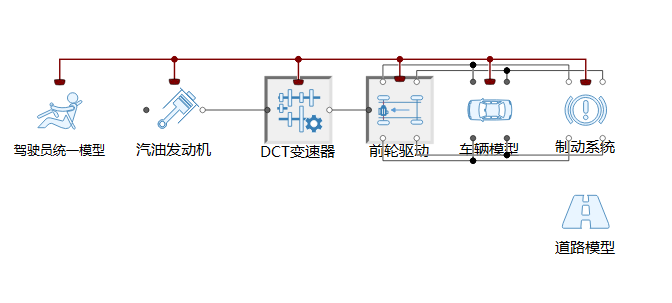
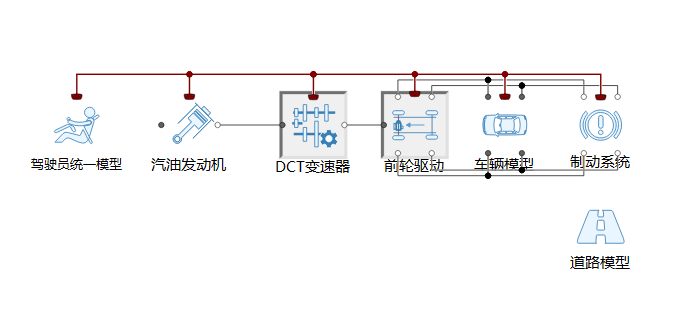
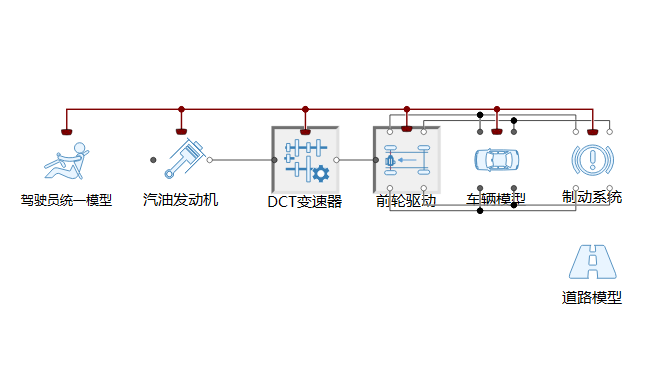
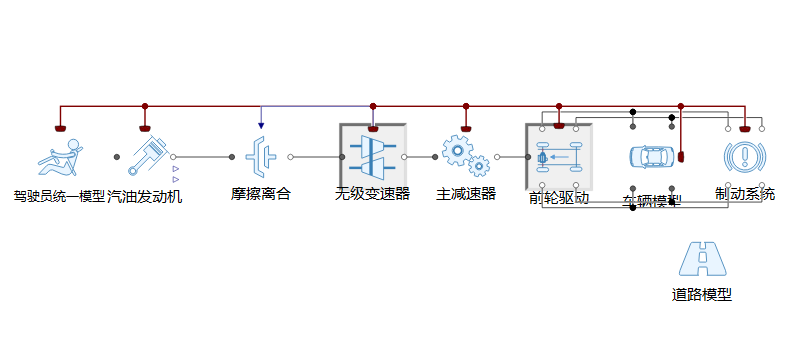
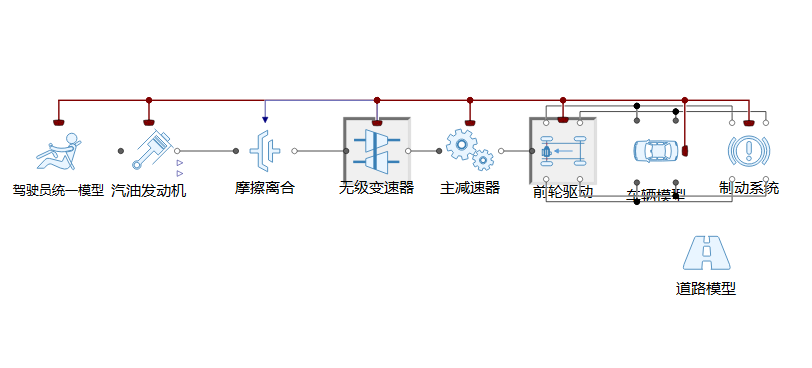
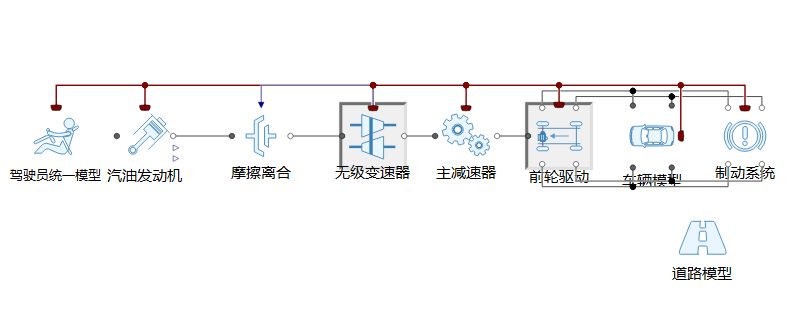
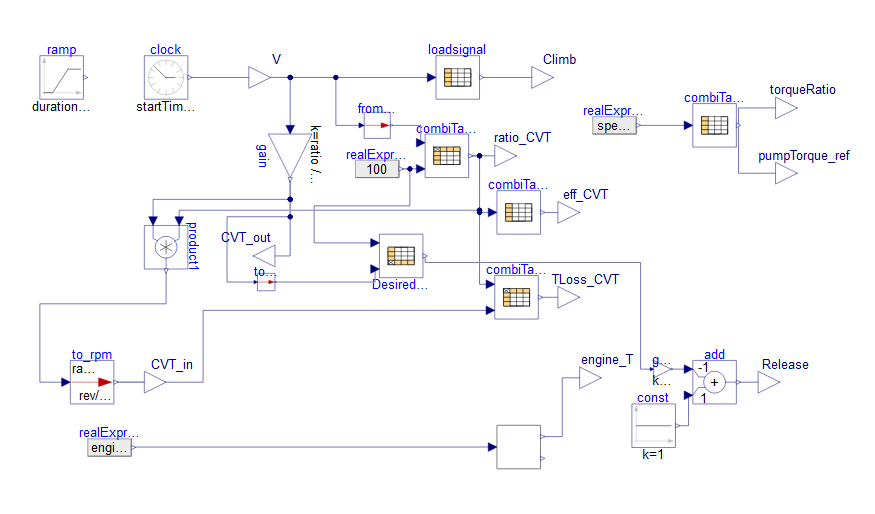
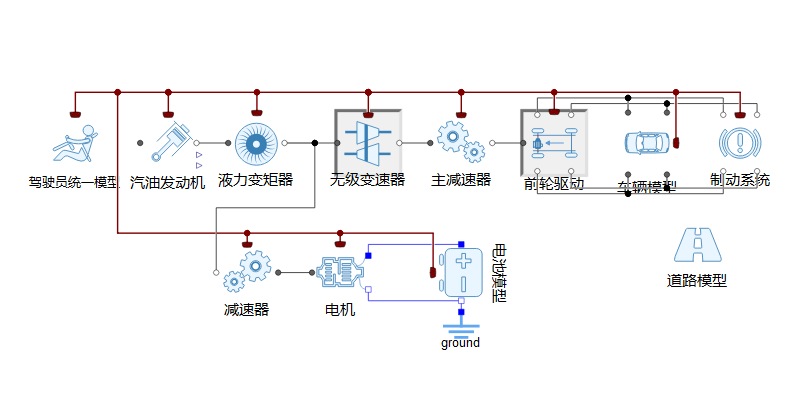
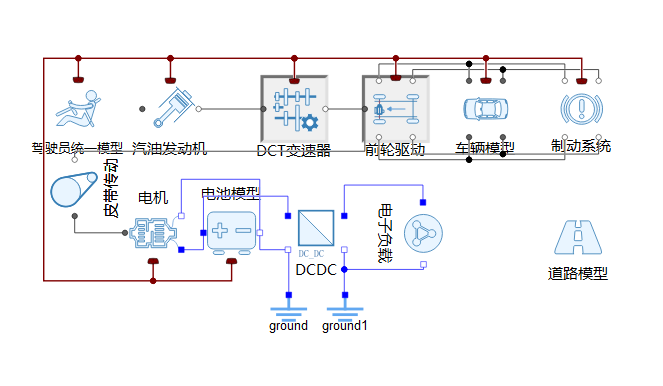
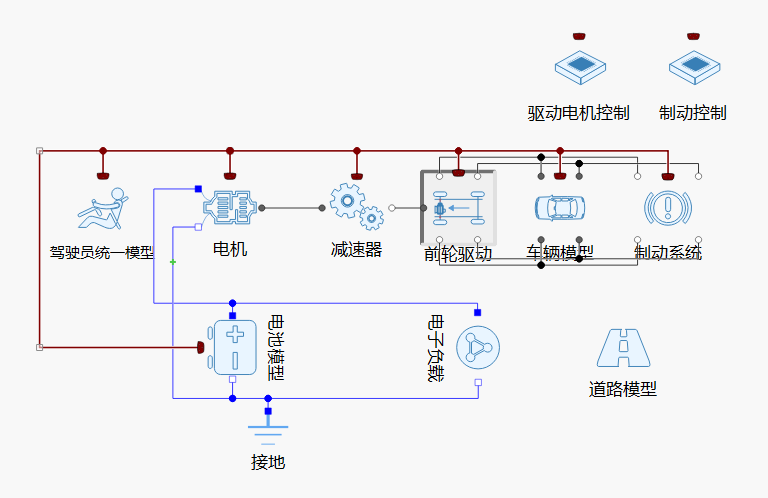
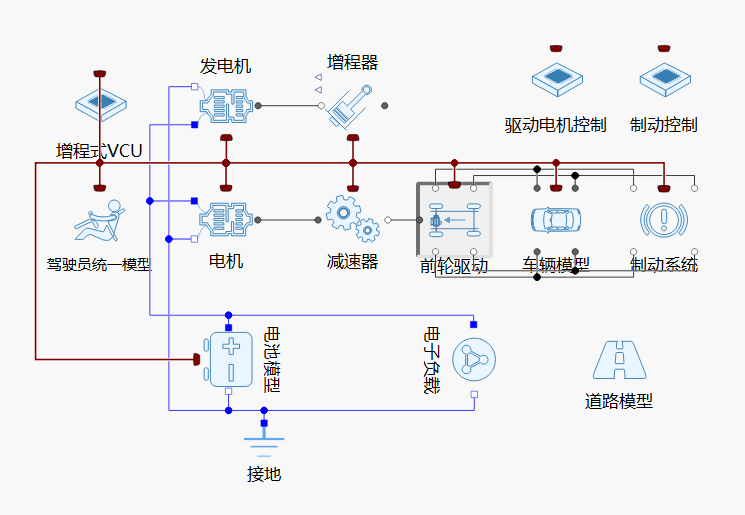
传统燃油车
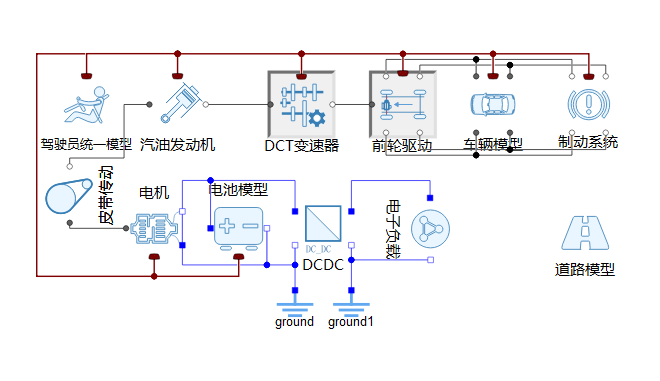
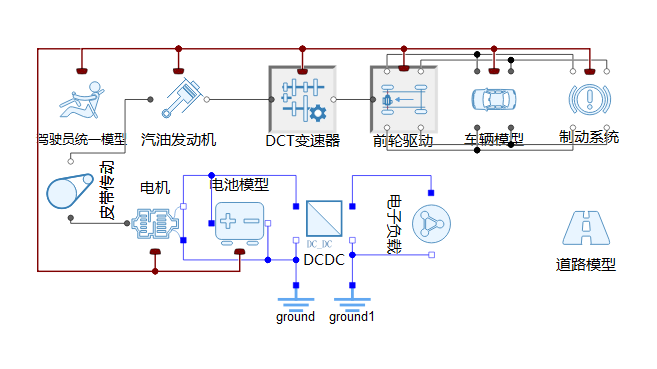
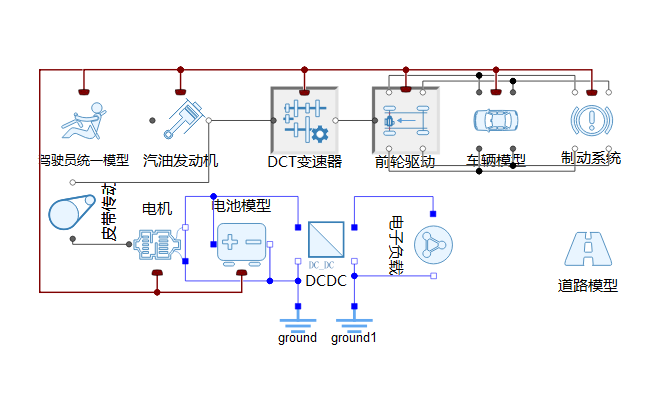
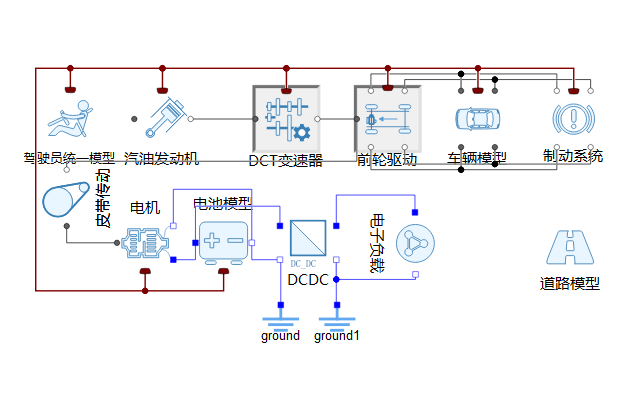
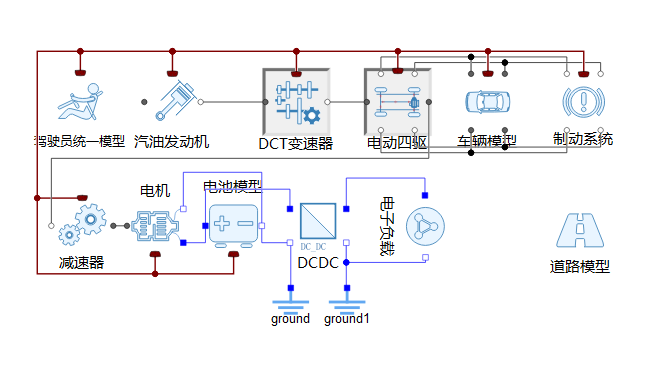
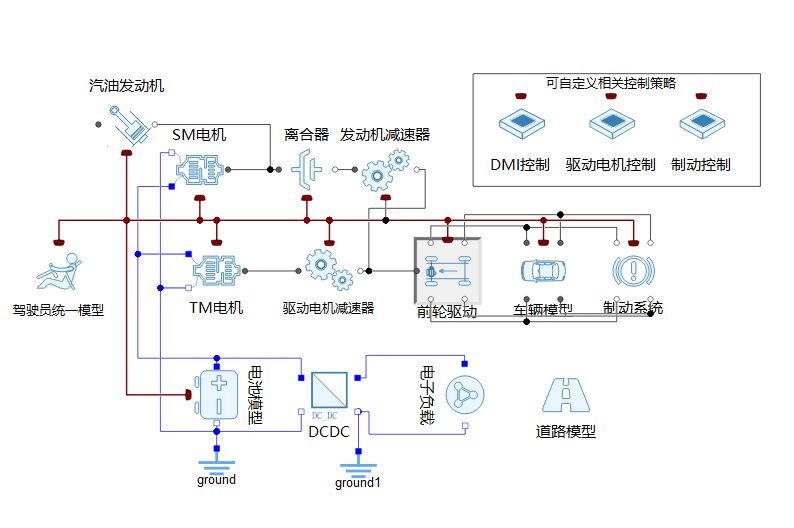
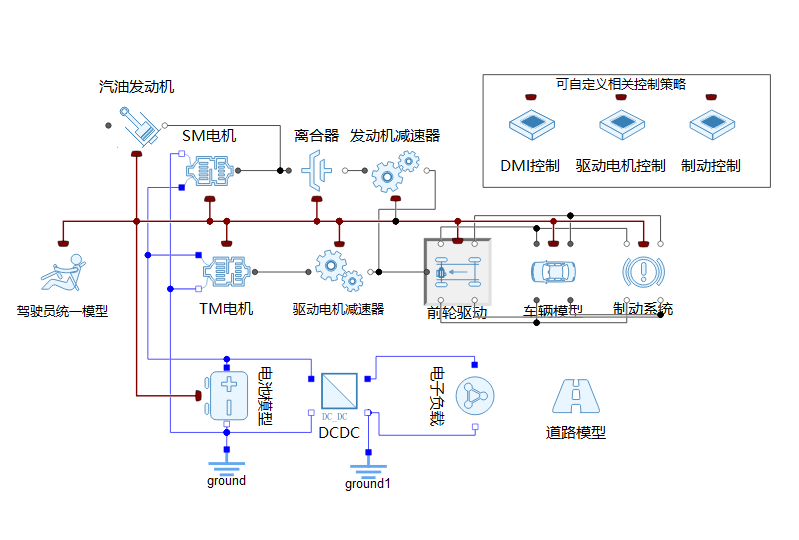
混动车
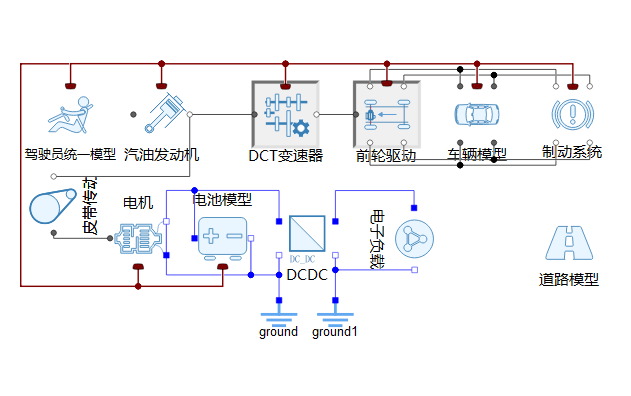
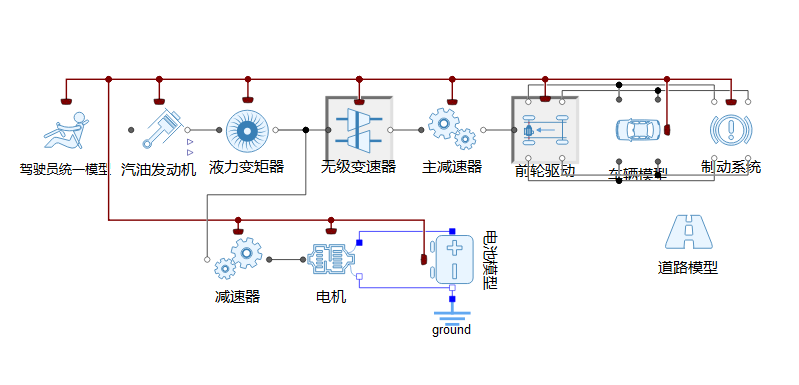
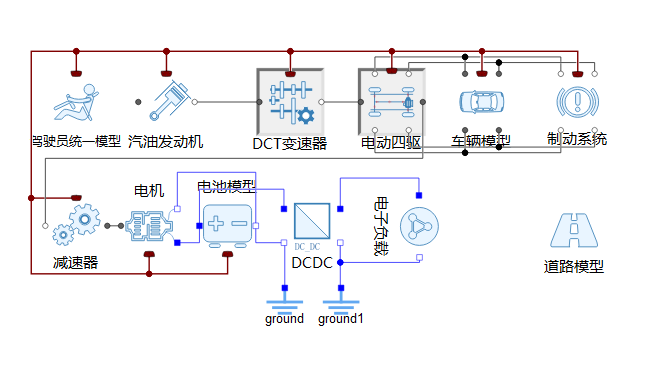
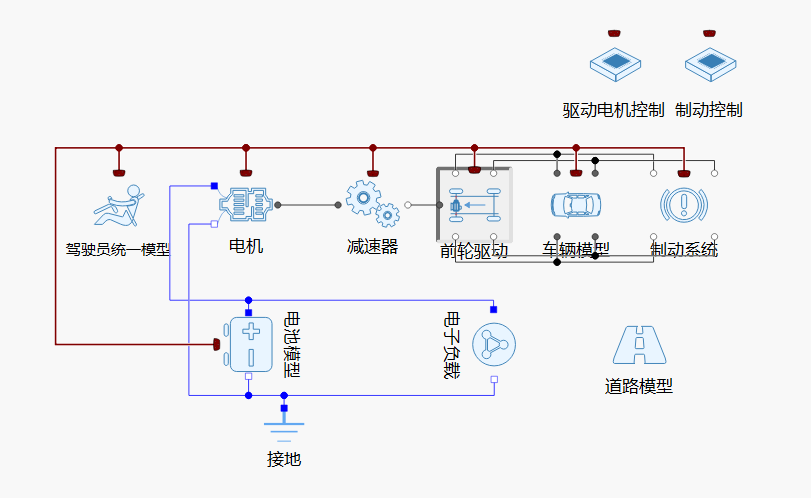
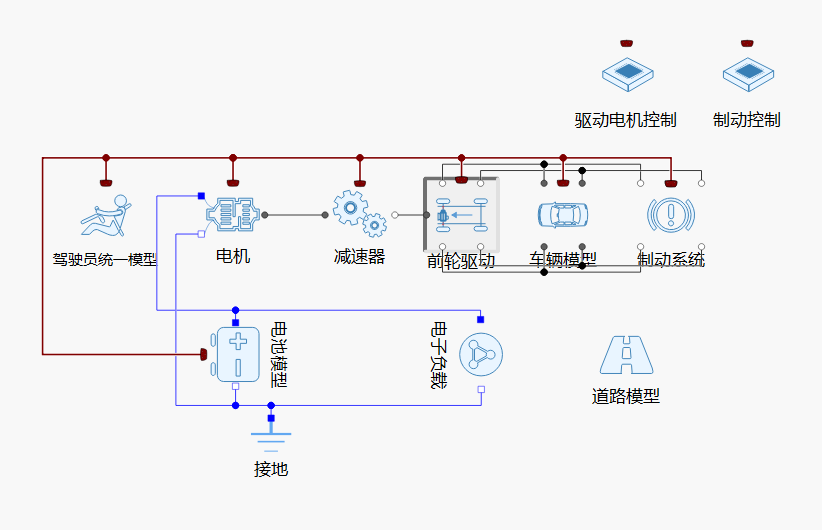
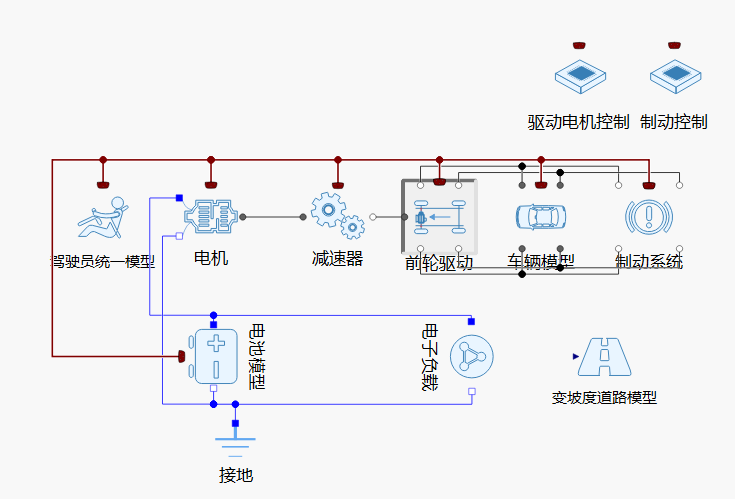
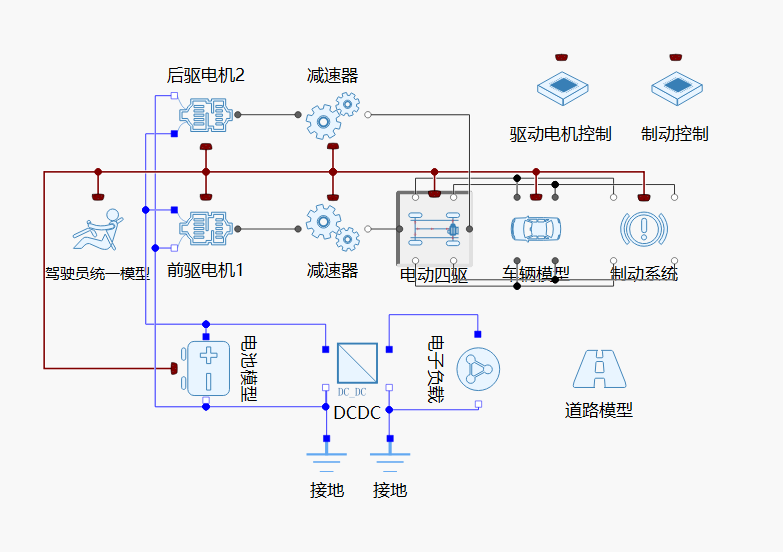
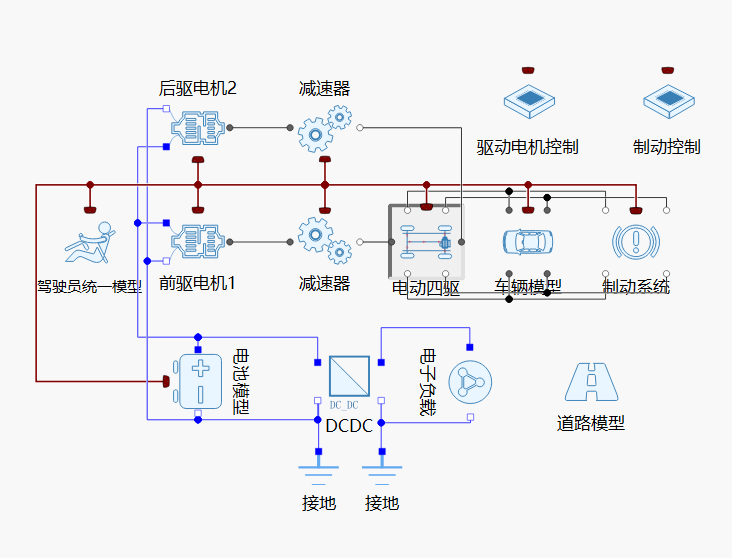
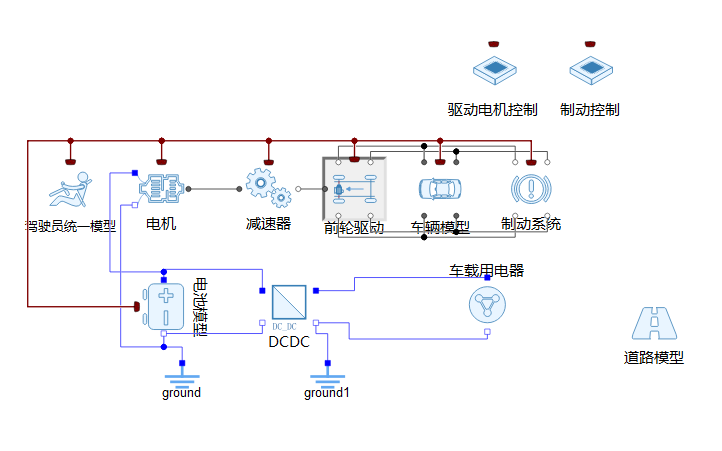
电动车
# 车辆热管理模型库
应用模型
组件模型案例
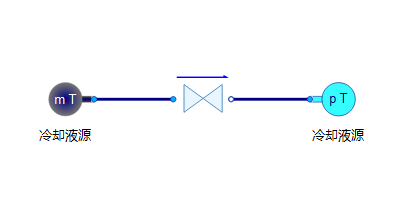
阀类
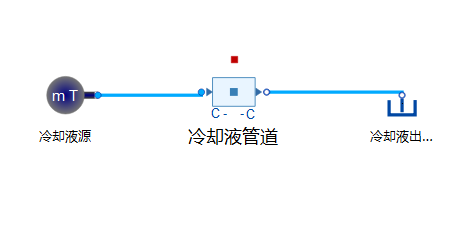
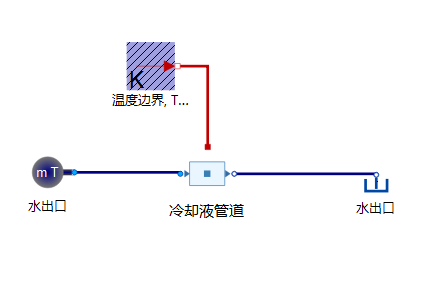
管道
- 流量边界
- 压力边界
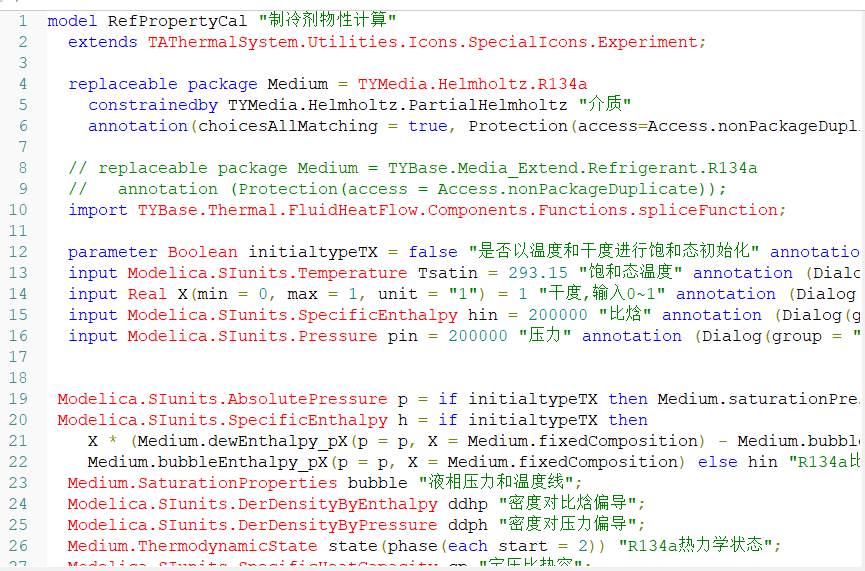
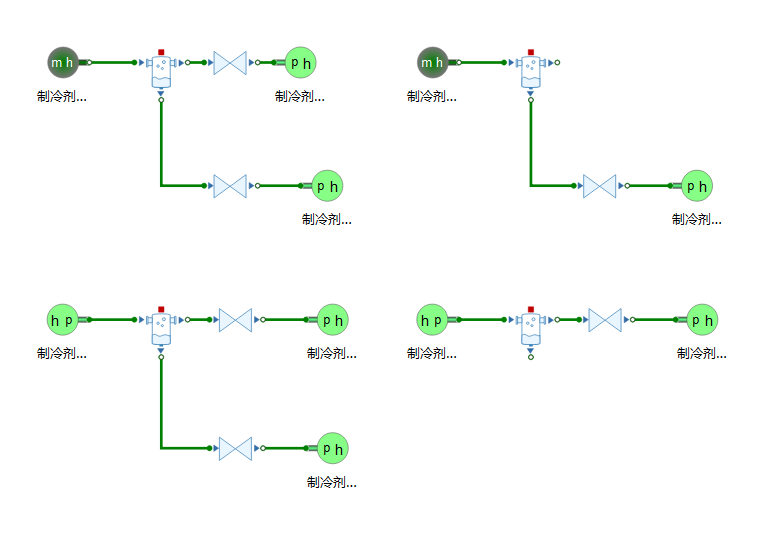
- R134a 制冷剂管道案例
三通
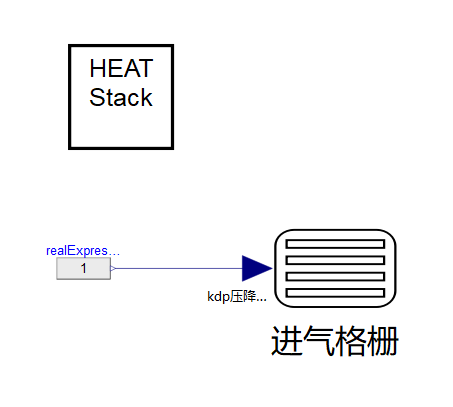
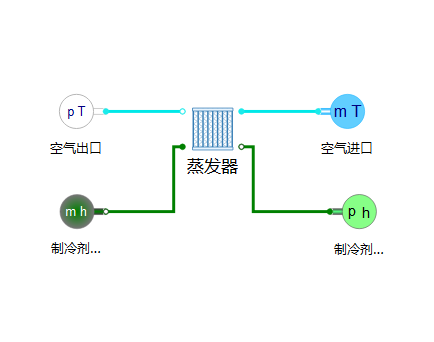
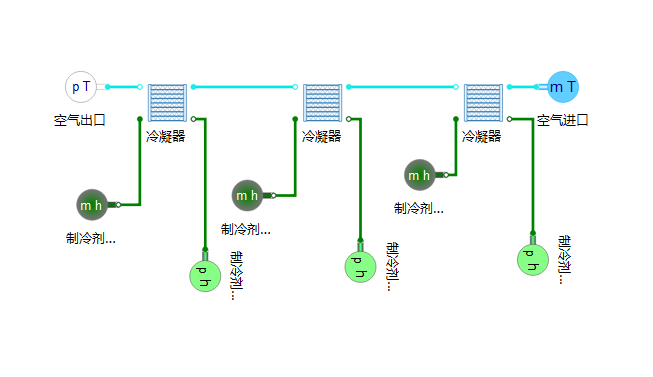
换热器
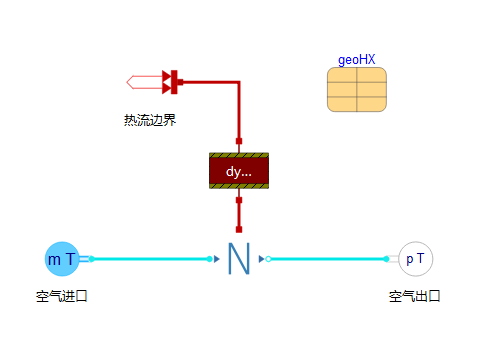
- 冷却液空气换热器
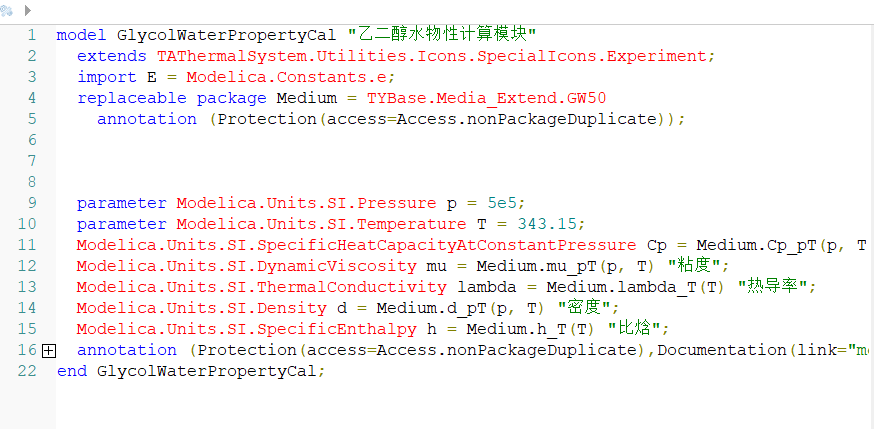
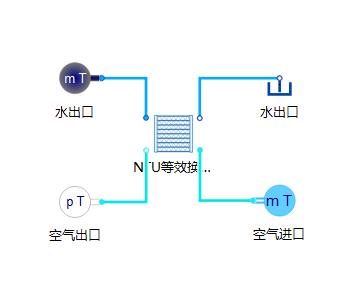 SingularPressure 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用 Singular 压降方式,考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例
SingularPressure 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用 Singular 压降方式,考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例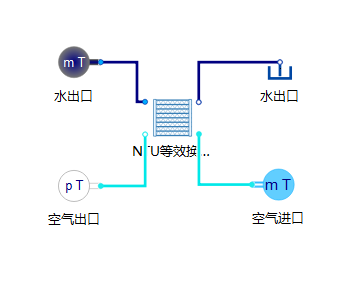 TableFOrZeta 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用 zeta 由 Re 查表的压降方式,考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例
TableFOrZeta 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用 zeta 由 Re 查表的压降方式,考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例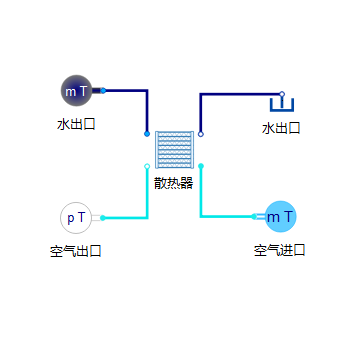 UserDefined 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用用户定义 dm=f(dp) 或 dm=f(dp,T) 的压降方式,考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例
UserDefined 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用用户定义 dm=f(dp) 或 dm=f(dp,T) 的压降方式,考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例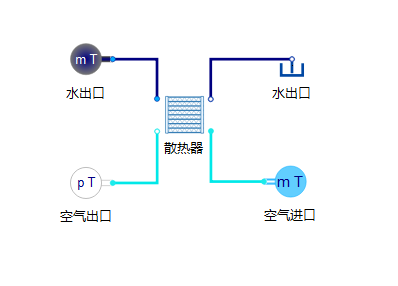 SingularPressure_noFins 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用 Singular 压降方式,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例
SingularPressure_noFins 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用 Singular 压降方式,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例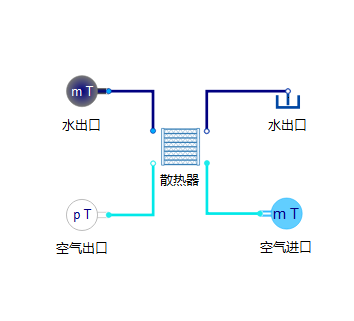 TableFOrZeta_noFins 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用 zeta 由 Re 查表的压降方式,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例
TableFOrZeta_noFins 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用 zeta 由 Re 查表的压降方式,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例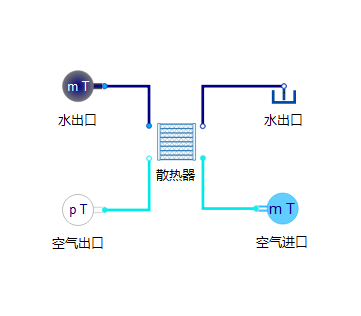 UserDefined_noFins 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用用户定义 dm=f(dp) 或 dm=f(dp,T) 的压降方式,,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例
UserDefined_noFins 冷却液-空气换热器该案例为冷却液-空气换热器单体测试,冷却液为 GW50 乙二醇介质,冷却液侧流阻使用用户定义 dm=f(dp) 或 dm=f(dp,T) 的压降方式,,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例- 冷却液冷却液换热器
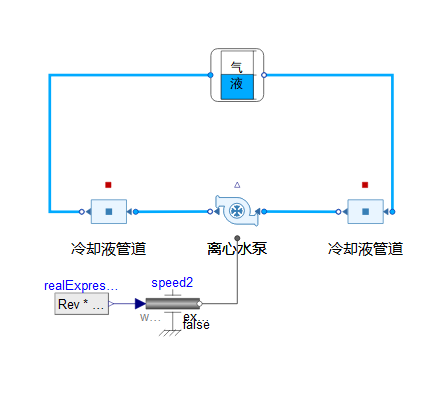
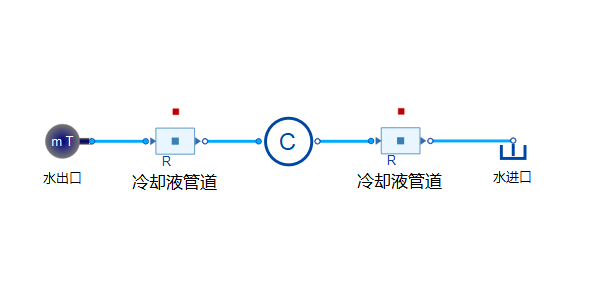
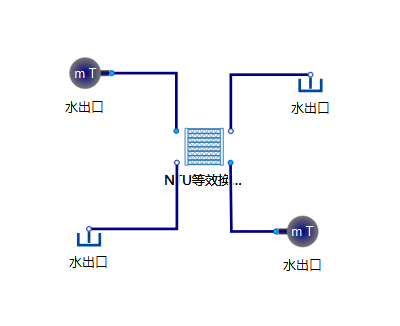 singular 冷却液-冷却液换热器该案例为冷却液-冷却液换热器单体测试,均为 GW50 乙二醇介质,冷却液侧两侧流阻使用 Singular 压降方式,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例
singular 冷却液-冷却液换热器该案例为冷却液-冷却液换热器单体测试,均为 GW50 乙二醇介质,冷却液侧两侧流阻使用 Singular 压降方式,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例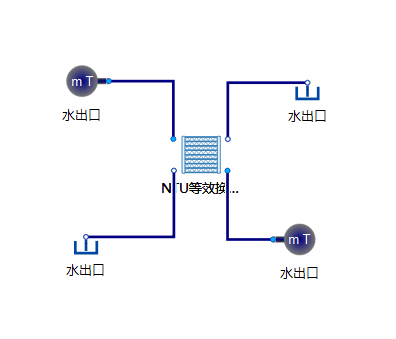 UserDefined 冷却液-冷却液换热器该案例为冷却液-冷却液换热器单体测试,均为 GW50 乙二醇介质,冷却液侧两侧流阻使用用户定义 dm=f(dp) 或 dm=f(dp,T) 的压降方式,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例
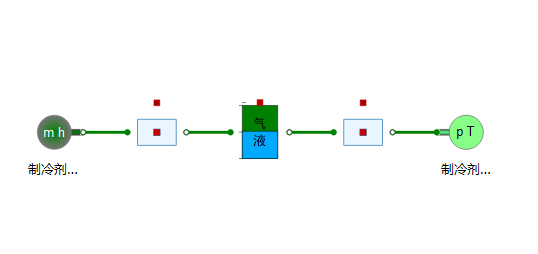
UserDefined 冷却液-冷却液换热器该案例为冷却液-冷却液换热器单体测试,均为 GW50 乙二醇介质,冷却液侧两侧流阻使用用户定义 dm=f(dp) 或 dm=f(dp,T) 的压降方式,不考虑散热器翅片,分析换热器换热量、以及压降情况。打开示例- 制冷剂空气换热器
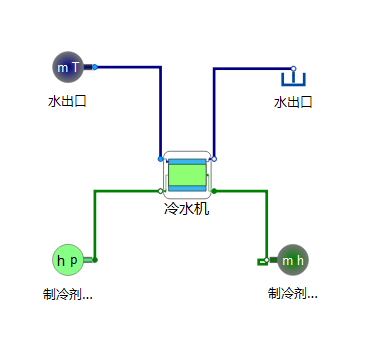
- 制冷剂冷却液换热器
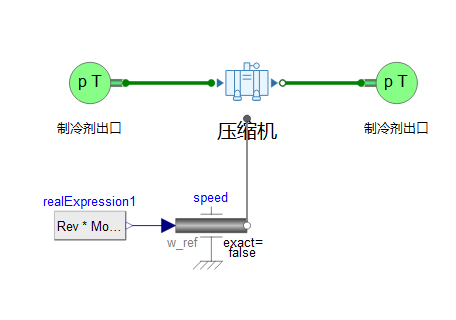
动力设备
容积类组件
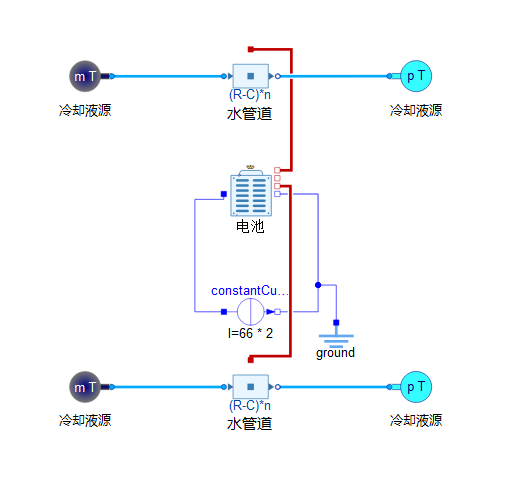
电池水冷
系统案例
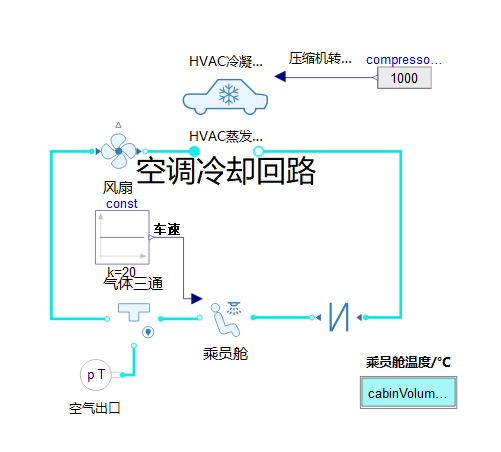
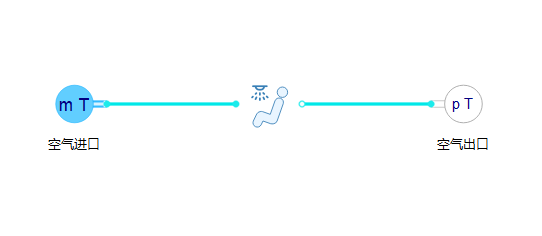
乘员舱优化案例
乘员舱优化案例模型,该乘员舱为优化版本的乘员舱模型,不仅考虑外界环境温度、压力、相对湿度对乘员舱的影响,而且包含太阳辐射、内外的对流传热过程。此外,能够对舱内的二氧化碳的浓度进行计算。
打开示例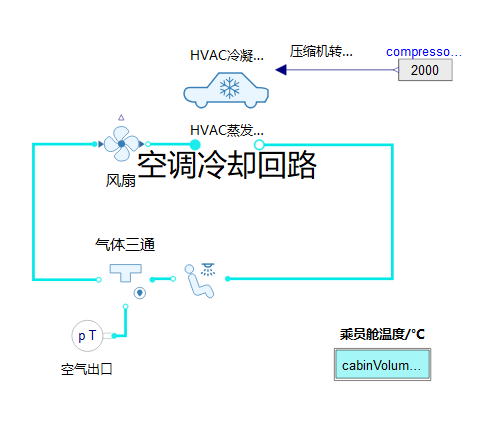
乘员舱换热网络案例
乘员舱换热网络模型,该乘员舱颗粒度较细,细化到前排仪表板、挡风玻璃、车顶和车顶帆布、侧板、侧面玻璃、后排玻璃以及车上各种材料传热。不仅考虑外界环境温度、压力、相对湿度对乘员舱的影响,而且包含太阳辐射以及太阳方位角和高度角对辐射影响、内外的对流传热过程。
打开示例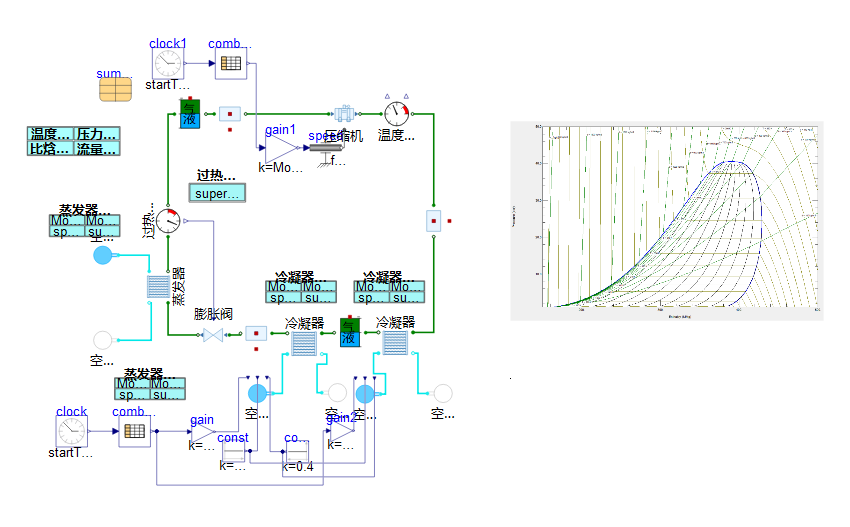
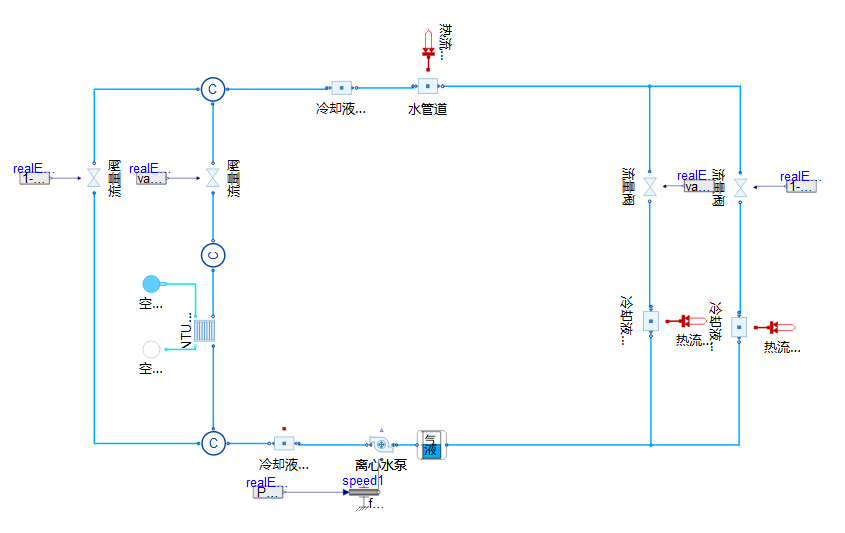
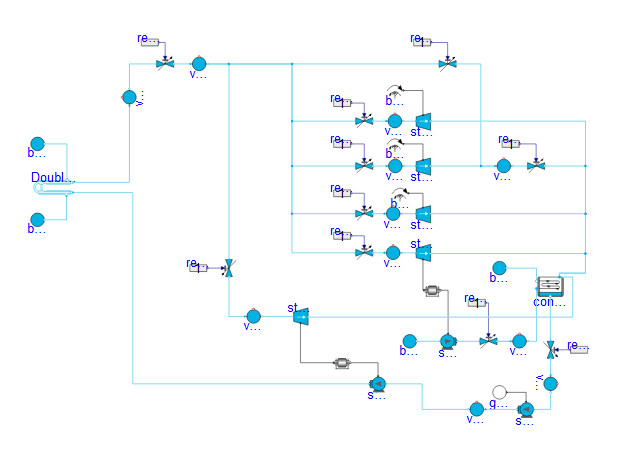
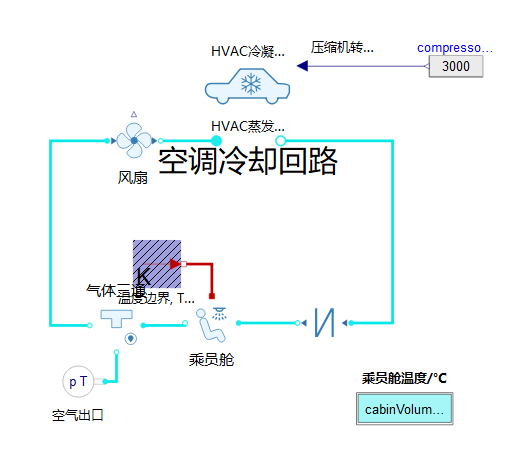
热管理系统(电池主动制冷)
该模型为热管理系统测试案例,包括电池、电机、乘员舱热管理的复杂系统回路。通过四通换向阀可实电池、电机回路并联或串联模型。该测例可仿真高温下的电池、乘员舱双制冷,电机散热模式。
打开示例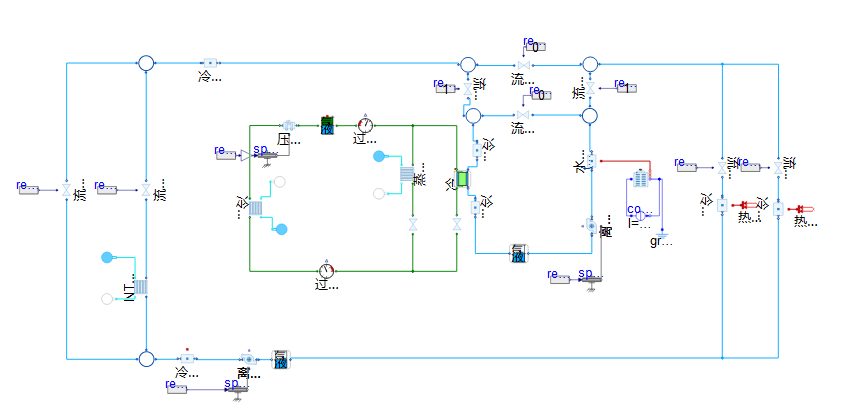
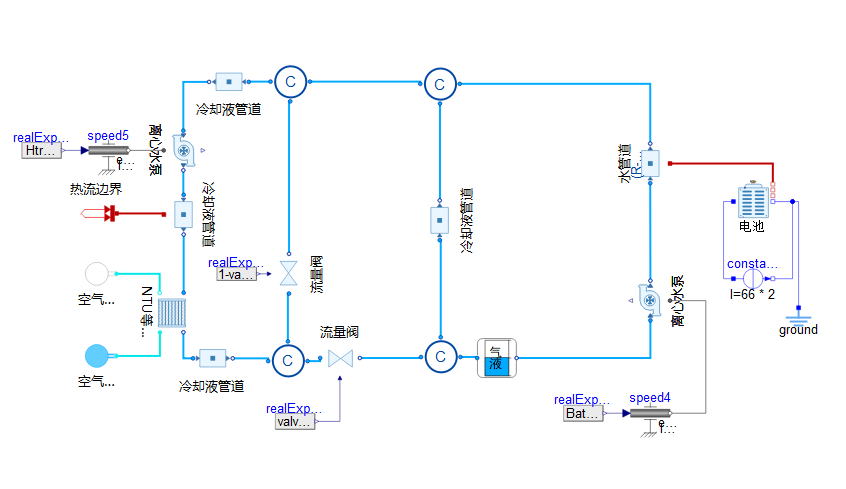
电池电机串联散热
该模型为热管理系统测试案例,包括电池、电机、乘员舱热管理的复杂系统回路。通过四通换向阀可实电池、电机回路并联或串联模型。该测例与上一个案例主要不同在于通过四通阀换向,使水侧电池回路和电机回路串联。可仿真电池制冷需求不大时的电池、电机串联散热,乘员舱制冷模式。
打开示例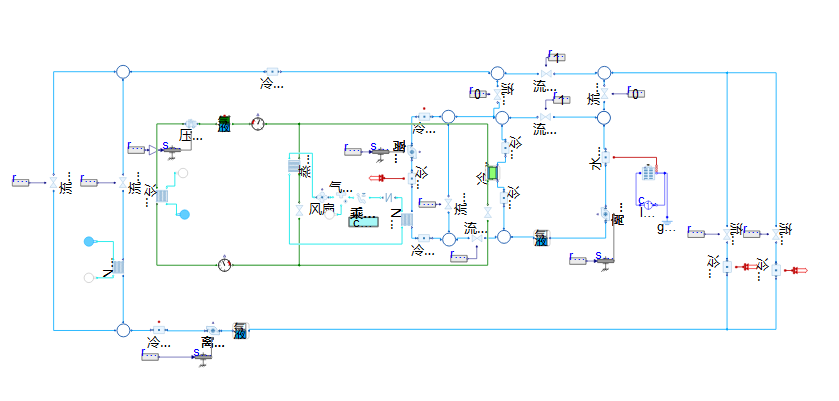
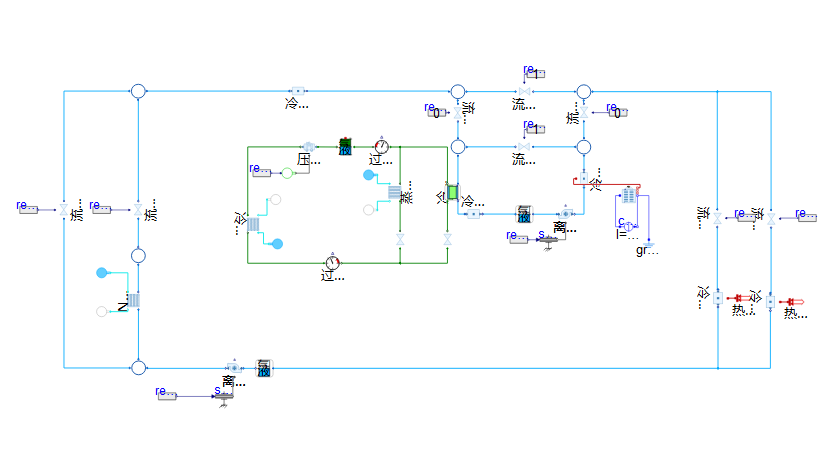
电池、暖芯 PTC 制热
该模型为热管理系统测试案例,包括电池、电机、乘员舱热管理的复杂系统回路。通过四通换向阀可实电池、电机回路并联或串联模型。该测例为电池电机并联模式,模拟较低温环境时的乘员舱电池制热、电机散热模式。
打开示例
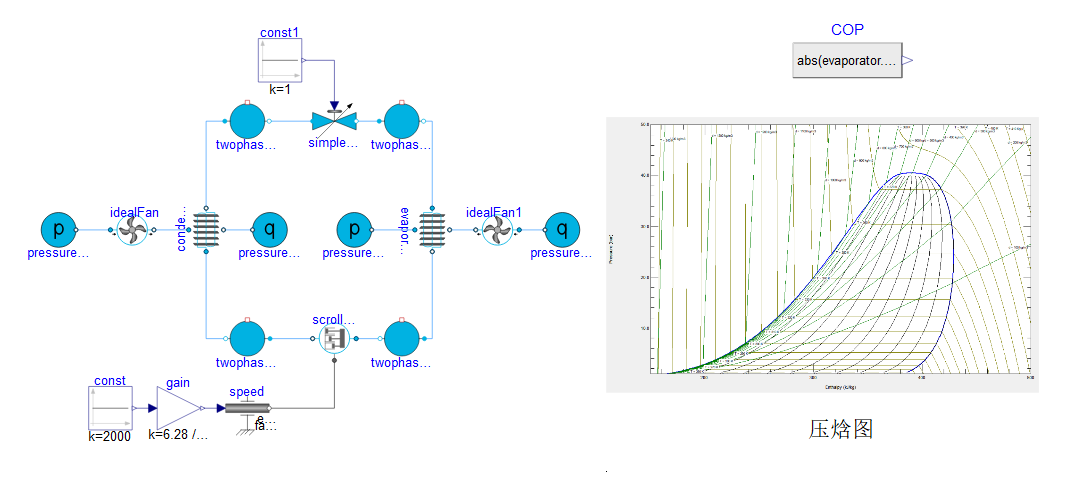
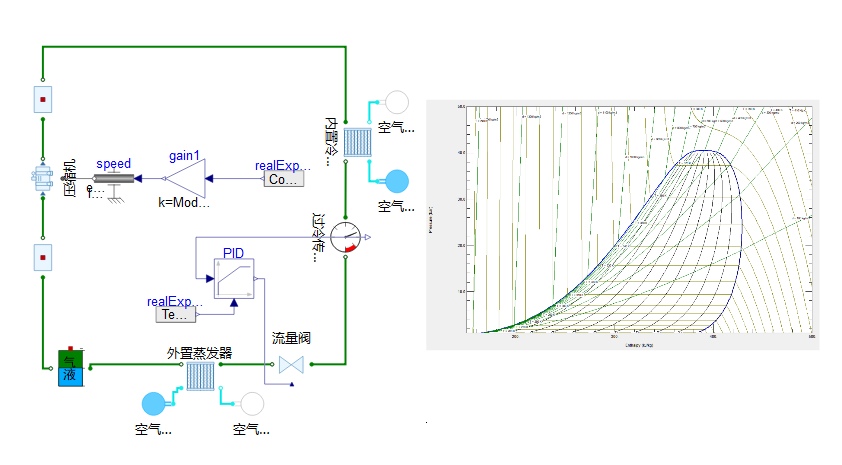
二次回路制冷 R290
R290 介质由于其可燃性,为安全起见,在空调系统中使用该制冷剂时经常使用二次回路,将制冷剂侧与水侧进行热交换,再进行后续的热量传递。这样可以使制冷剂系统十分简单且紧凑,减少 R290 的充注量,降低泄露风险。
打开示例
# 车辆电子模型库
单元示例
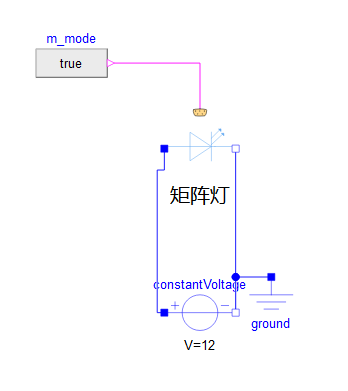
Led 示例
该 LED 矩阵灯模型中,可以使用缺省相对发光强度为 2240 cd(坎德拉)的 LED 灯,通过 m 个并联后 n 个串联的方式形成 m×n 的矩阵大灯。用户可自定义相对发光强度、矩阵灯行数/列数、发光强度-电流关系,通过外部信号源和 LED 总线的信号传递,实现 LED 矩阵灯的模拟与仿真。
打开示例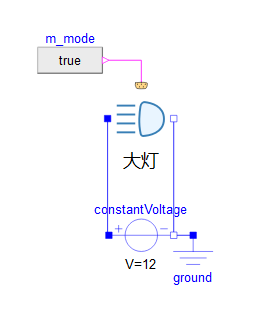
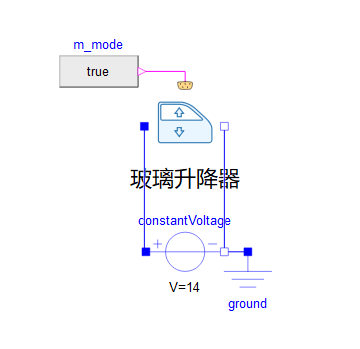
车窗示例
在车窗模型中,可使用缺省峰值电流 15 A,额定电流 5 A,阻断电流 20 A 的玻璃升降器。用户可自定义峰值电流、额定电流、阻断电流,通过外部信号源和玻璃升降器总线的信号传递,实现车窗的模拟与仿真。
打开示例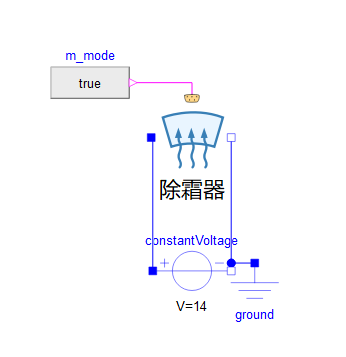
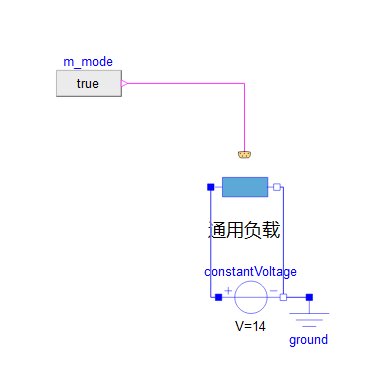
通用负载示例
通用负载测试模型中,可以通过车辆总线中的布尔信号来控制通用负载的开关,模拟出不同的模拟输出电流,从而进行对通用负载的电流、功率和能耗的模拟与仿真。该模型有两个档位,分别是开启 true 和 false。用户可以自定义模拟输出电流实现通用负载测试模型的仿真。
打开示例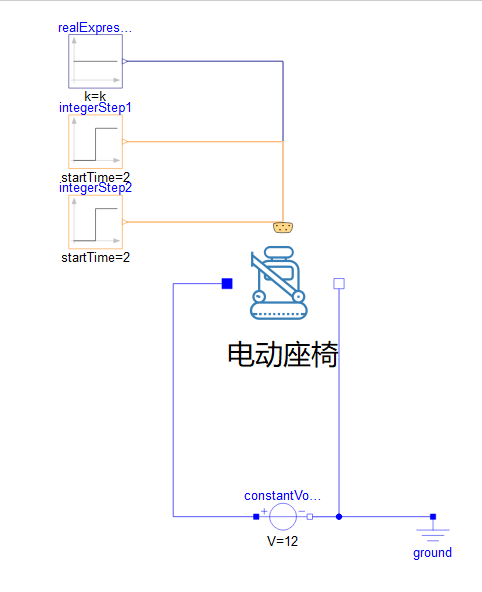
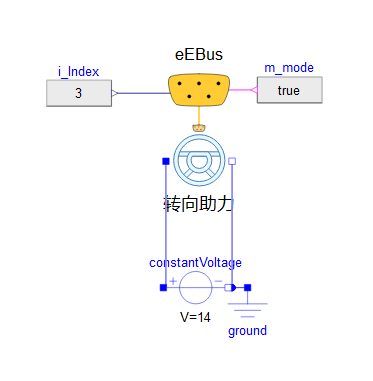
转向助力示例
转向助力模型是受路面粗糙度指数影响的电液助力系统模型。共有 6 个档位。分别是理想道路、机场跑道/高速路面、新路面、老旧路面、时常养护的无铺面路面、已损坏道路。用户可自定义转向模型的电流参数,通过外部信号源与电子电器总线的信号传递,实现转向模型的模拟与仿真。
打开示例系统示例
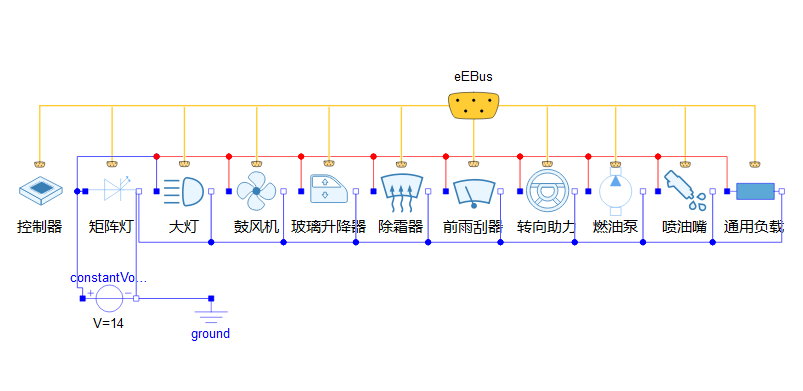
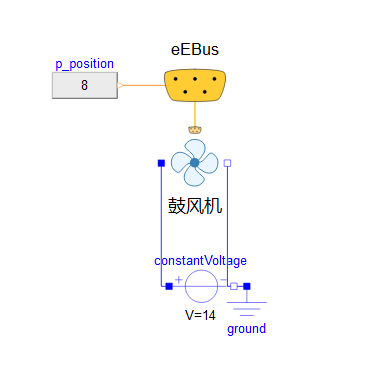
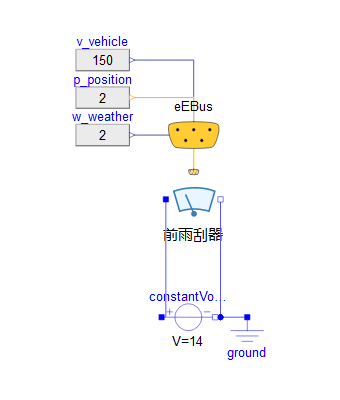
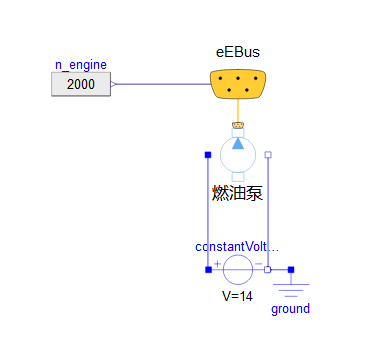
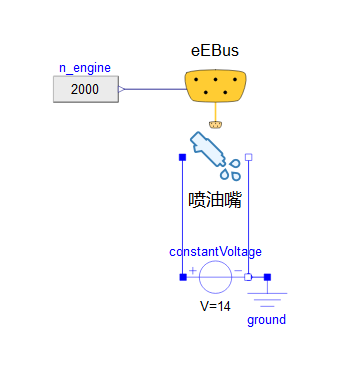
电子负载示例
该系统为多组件集成的模型,其构建分别为 LED 灯、大灯、鼓风机、玻璃升降器、除霜器、前后雨刮器、转向模型、燃油泵、喷油嘴和通用负载。用户可自定义各组件工作参数,通过控制器与组件总线的信号传递,实现系统的模拟与仿真。
打开示例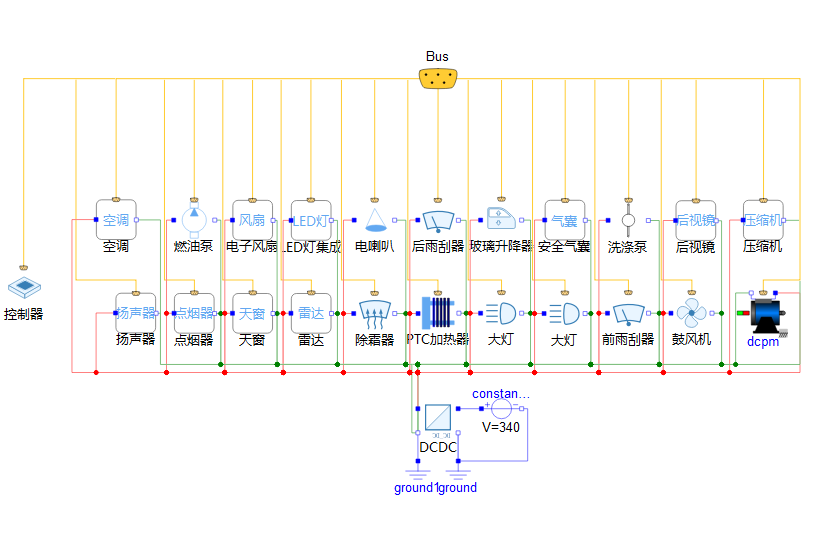
# 车辆发动机模型库
# 车辆电池模型库
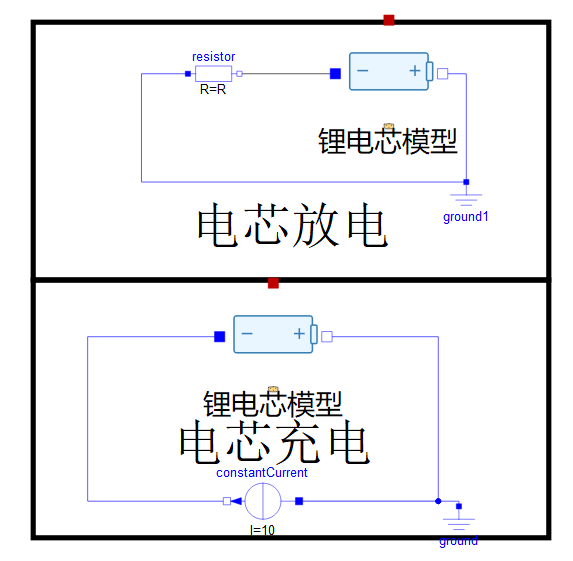
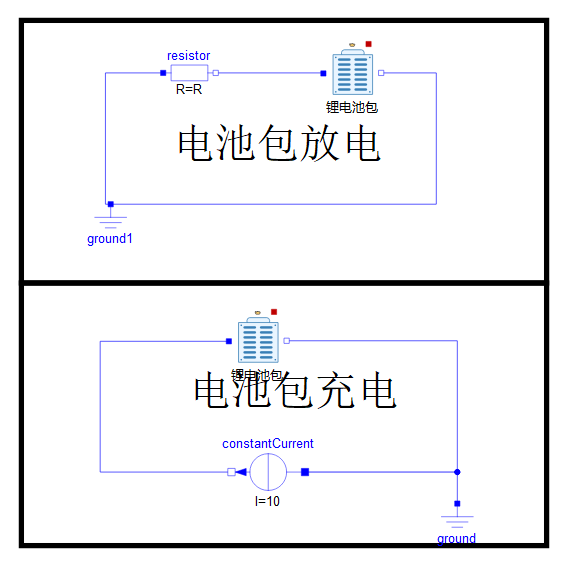
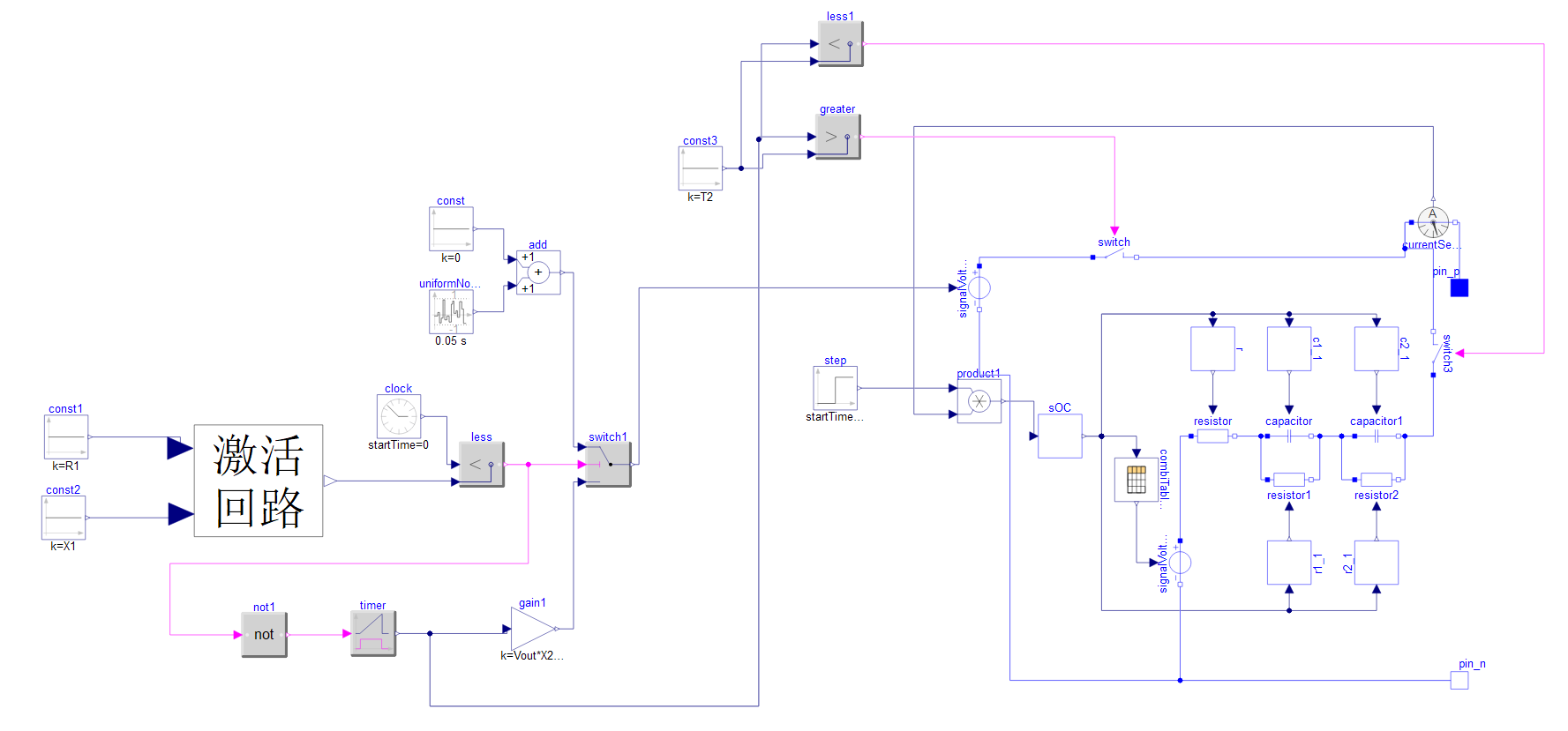
电芯充放电
本案例包含一个电芯单体充电案例,仿真可评估电芯在一定起始 SOC 状态下,充电情况下电芯的 SOC 变化情况,以及两端输出电压。包含一个电芯单体放电案例,模拟单节电芯的放电仿真案例,初始 SOC 为 100%,放电情况下电芯的 SOC 变化情况,以及两端输出电压。
打开示例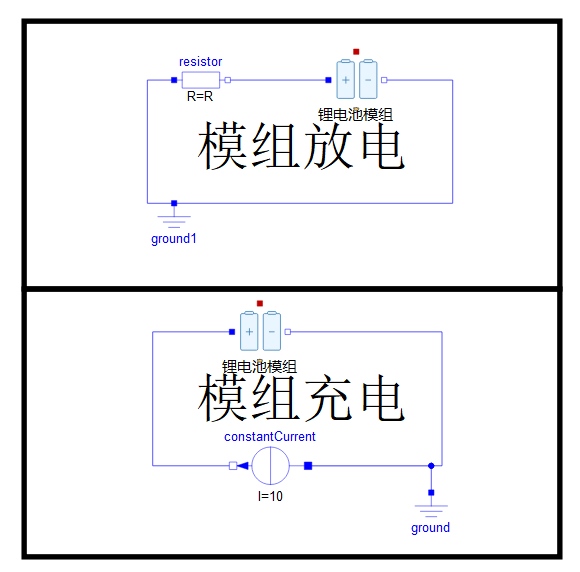
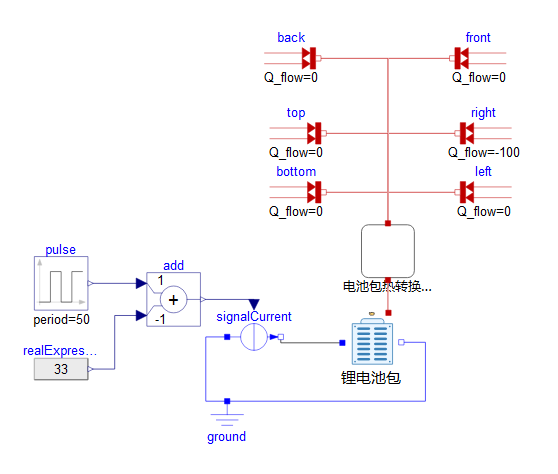
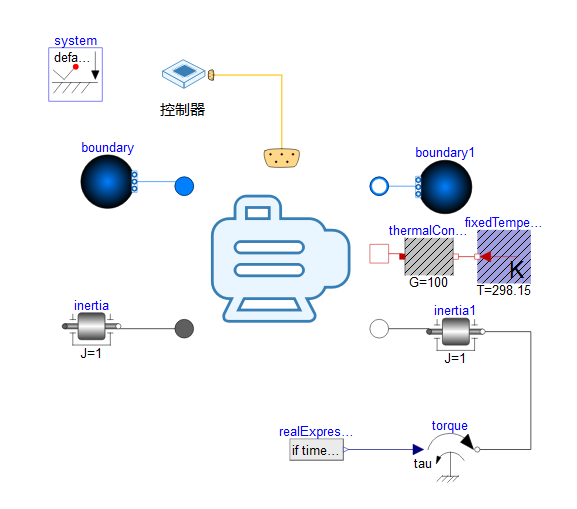
电池包热应用案例
本应用案例为电池包冷却例子,电池包为 1 并 1 串的电池包模型,主要仿真分析电池包以脉冲周期电流充放电时,电池包的 SOC 变化以及热分析,同时在电池包右侧进行冷却,以 100 W 的功率吸收热量。
打开示例# 能源行业模型库
提示
单击打开示例后,可能会出现图形视图显示异常的情况,原因是未加载对应的模型库。此时单击主页工具栏检查按钮,会自动加载对应的模型库,通过检查后模型会正常展示。
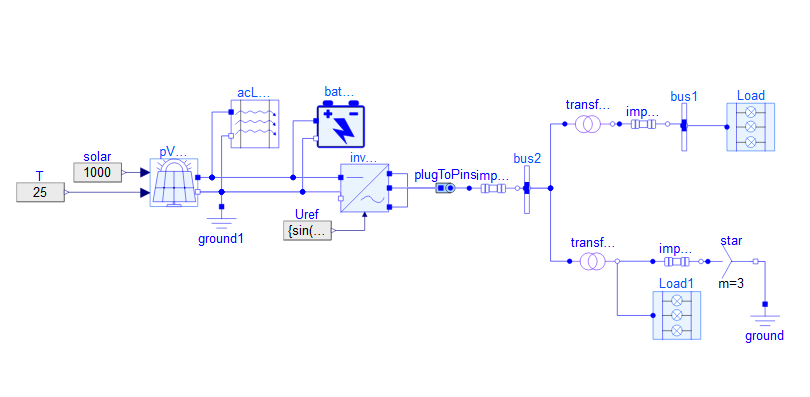
# 光伏发电模型库
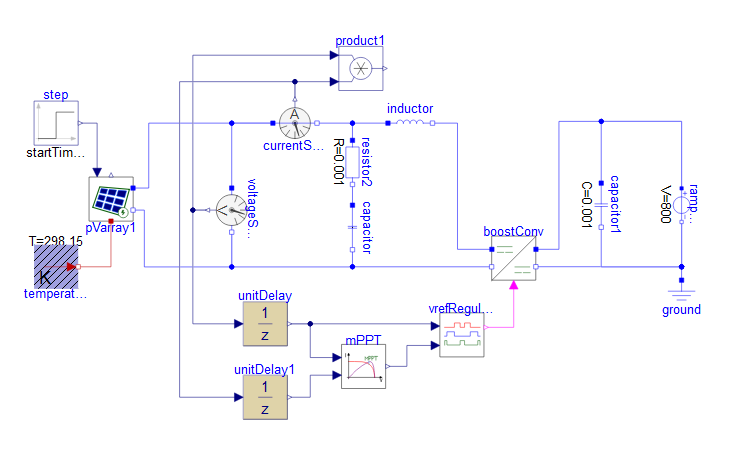
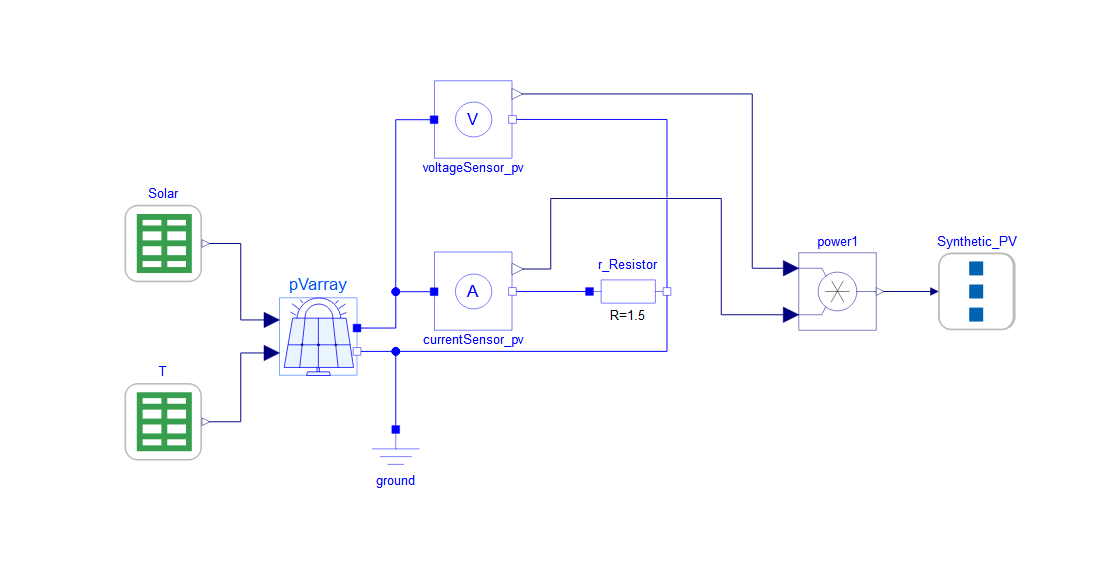
光伏发电最大功率点跟踪-开关
光伏发电最大功率点跟踪系统包括环境模型、Boost 升压斩波、电容、电感、电阻、电源负载和电压电流传感器等模型,其中 Boost 升压变换器采用开关电路型模型,通过接收电压调节器输出的 PWM 波信号进行升压变换。
打开示例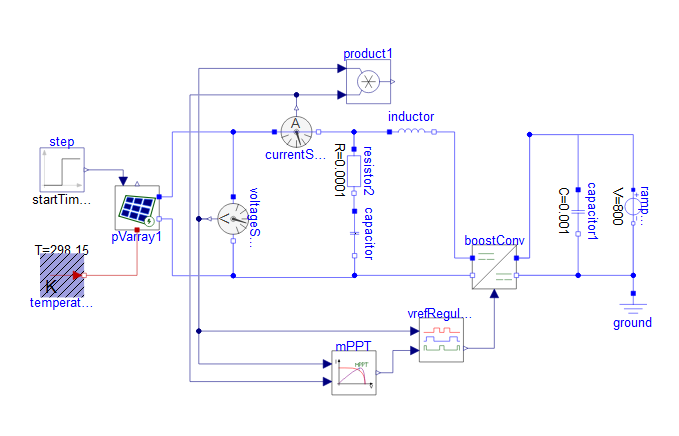
光伏发电最大功率点跟踪-平均值
光伏发电最大功率点跟踪系统包括环境模型、光伏板、Boost 升压斩波、电容、电感、电阻、电源负载和电压电流传感器等模型,其中 Boost 升压变换器采用平均值模型,通过接收电压调节器输出的占空比信号进行升压变换。
打开示例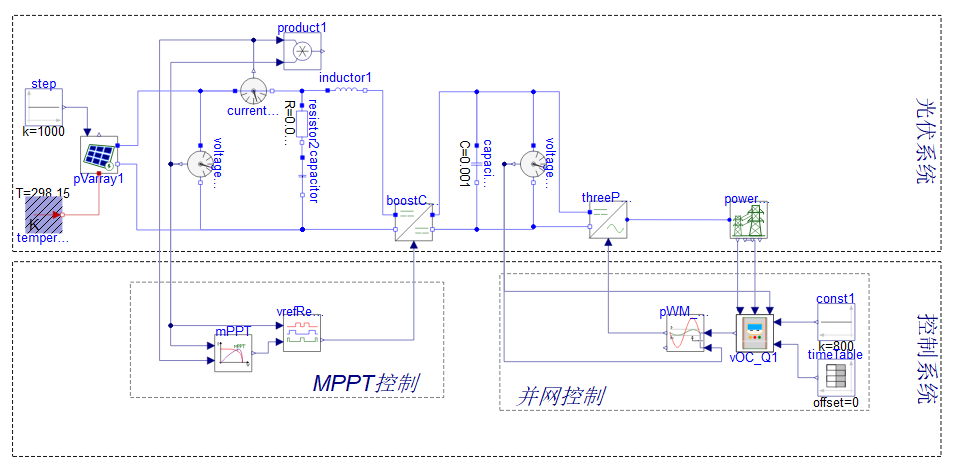
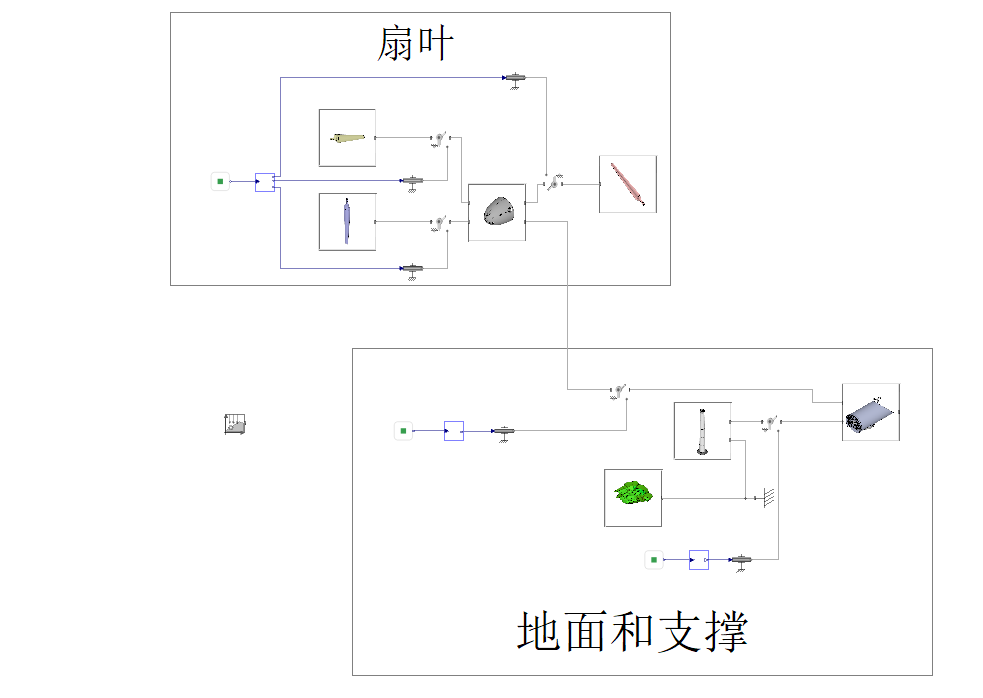
# 风力发电模型库
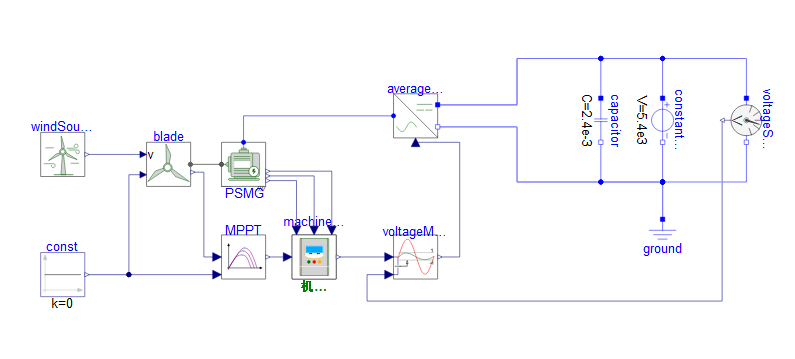
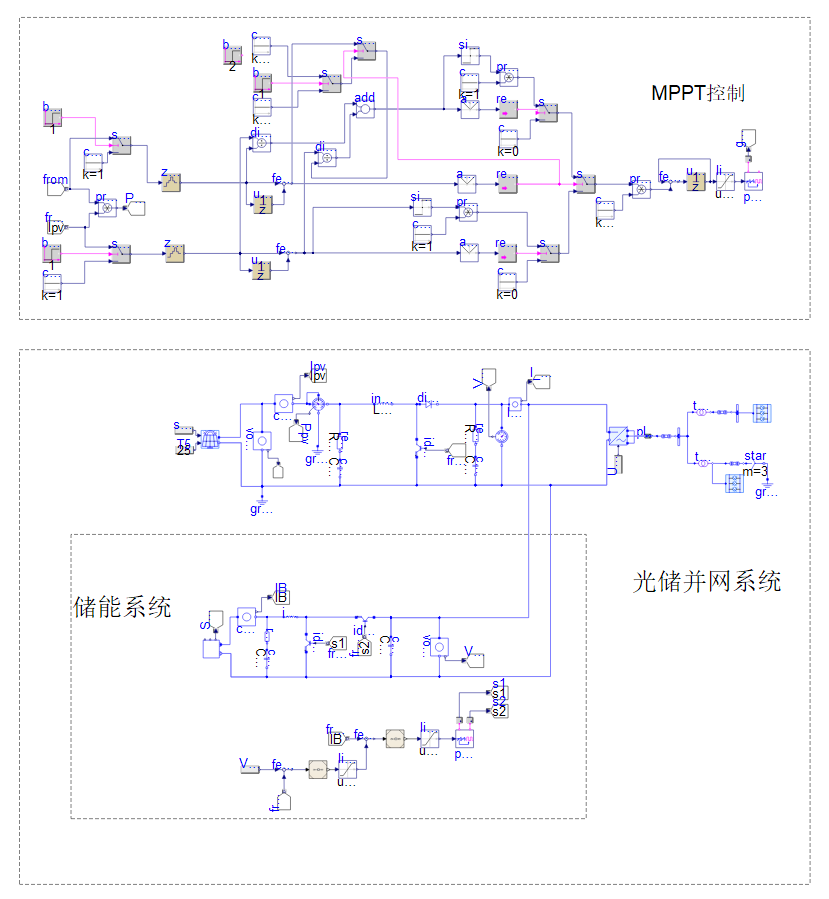
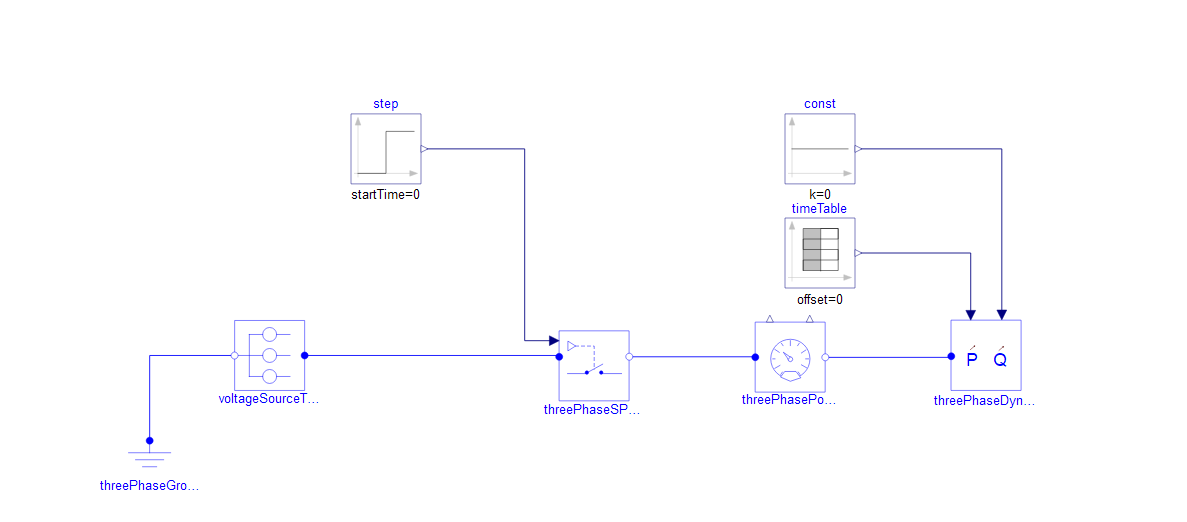
双馈发电机并网系统-转速控制
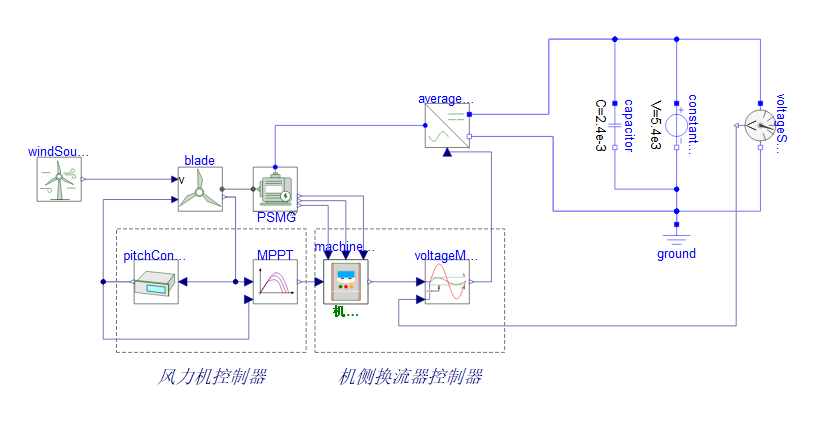
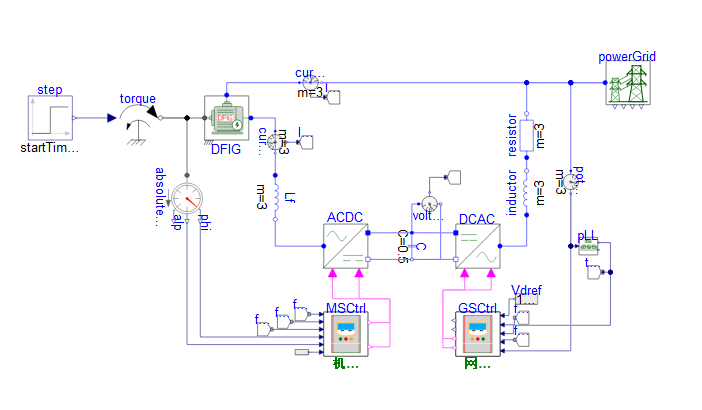
该实例模拟了采用背靠背双 PWM 换流器并网的双馈风力发电系统。输入力矩设置为恒值,模拟风能转化为机械能时的输入力矩,带动双馈电机进行转动发电,机侧采用定子电压定向控制,网侧采用电网电压定向,并在网侧变流器的输出侧配置滤波电感,模拟发电机运行在额定转速下的发电能力,以及变流器直流侧母线电压的稳定性。
打开示例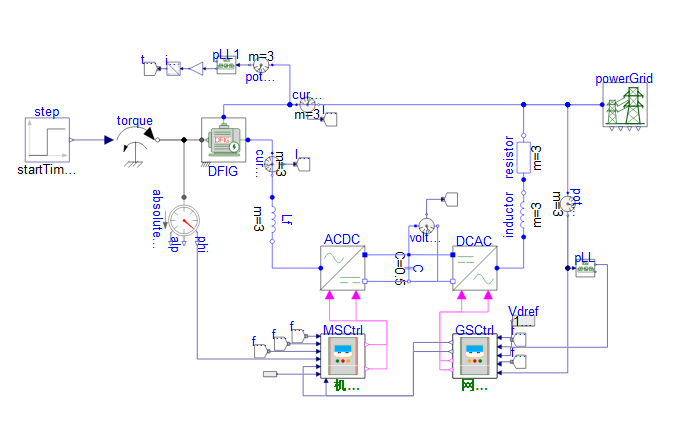
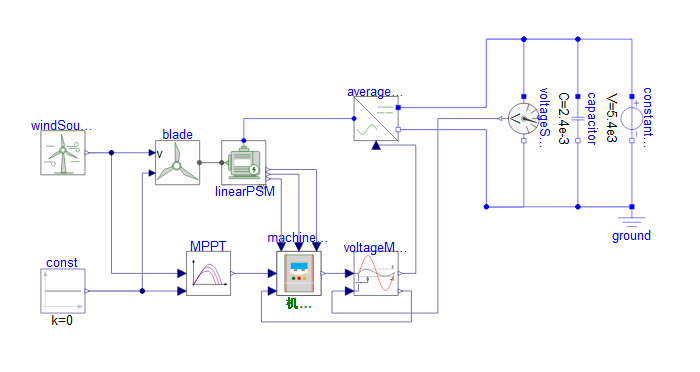
双馈发电机并网系统-功率控制
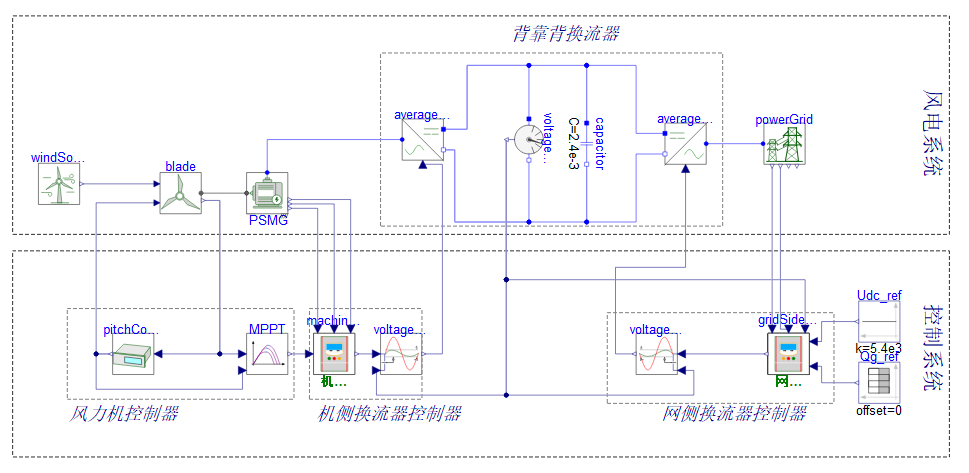
该实例模拟了采用背靠背双 PWM 换流器并网的双馈风力发电系统。输入力矩设置为恒值,模拟风能转化为机械能时的输入力矩,带动双馈电机进行转动发电,机侧采用定子电压定向控制,网侧采用电网电压定向,并在网侧变流器的输出侧配置滤波电感,模拟发电机有功功率 1 MW 控制,以及变流器直流侧母线电压的稳定性。
打开示例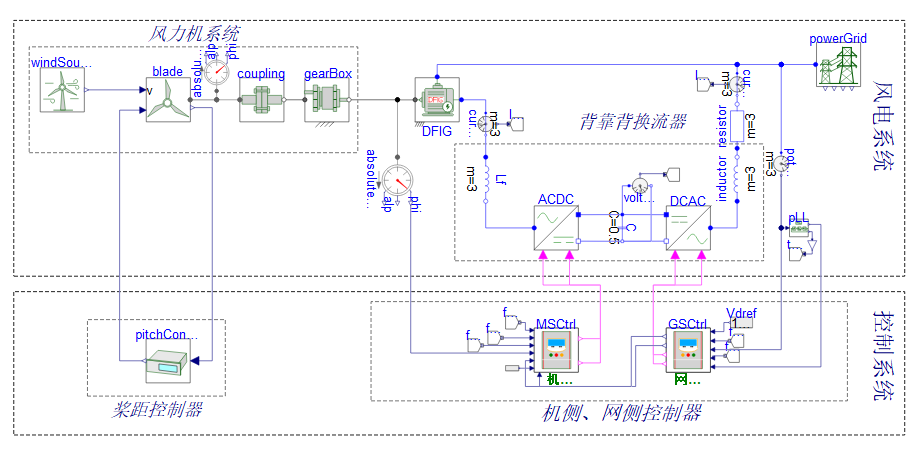
双馈发电机并网系统
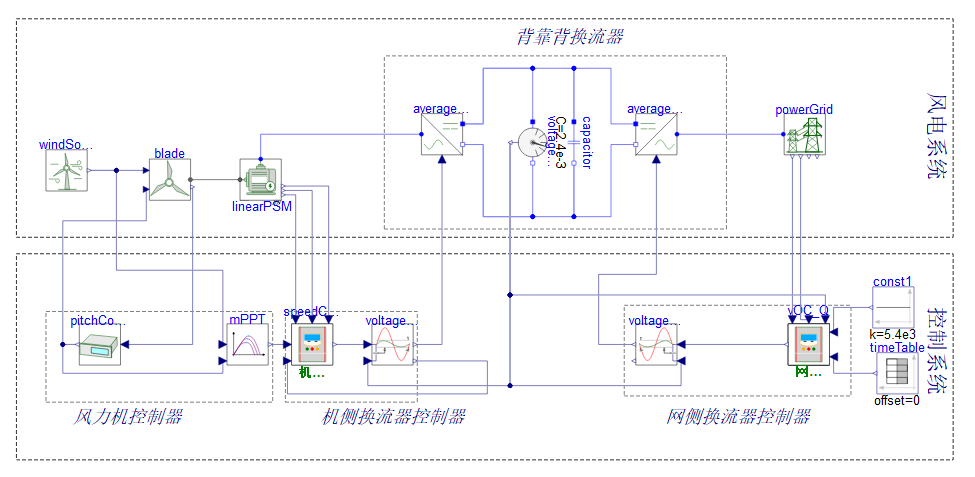
该实例模拟了采用背靠背双 PWM 换流器并网的双馈风力发电系统。接入风力机、桨叶、桨距控制器等设备模型,带动双馈电机进行转动发电,机侧采用定子电压定向控制,网侧采用电网电压定向,并在网侧变流器的输出侧配置滤波电感,模拟变化风速工况中,在桨距控制器的作用下,双馈机组的运行特性以及变流器直流侧母线电压的稳定性。
打开示例# 综合能源系统模型库
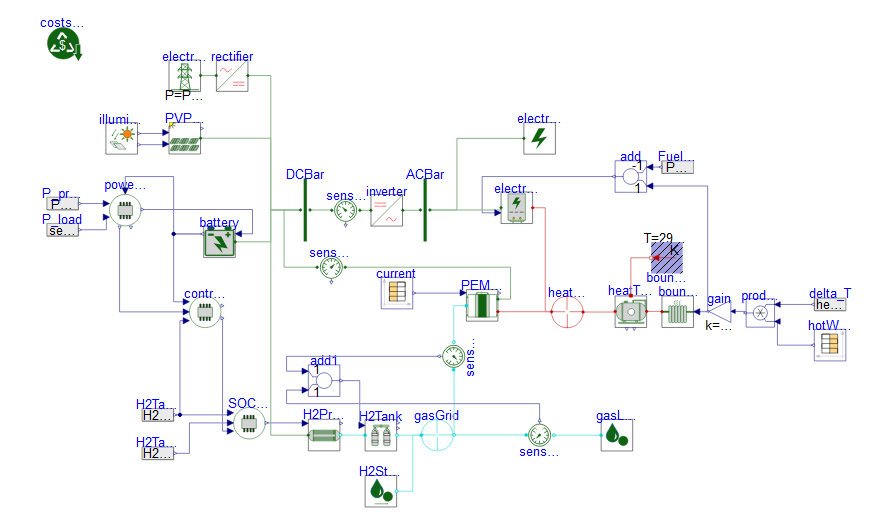
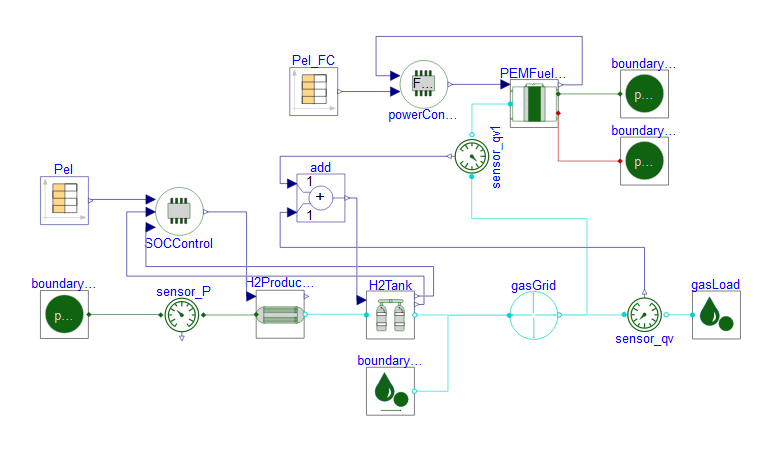
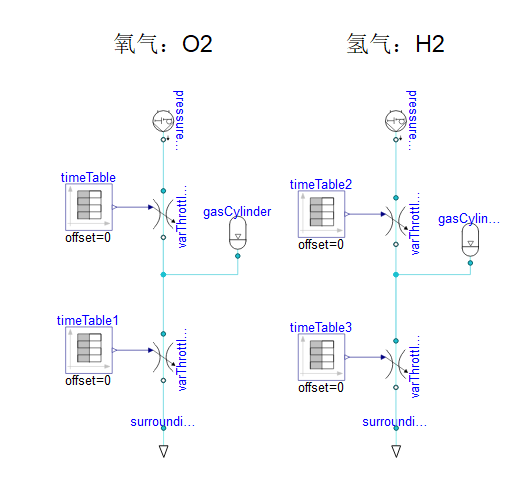
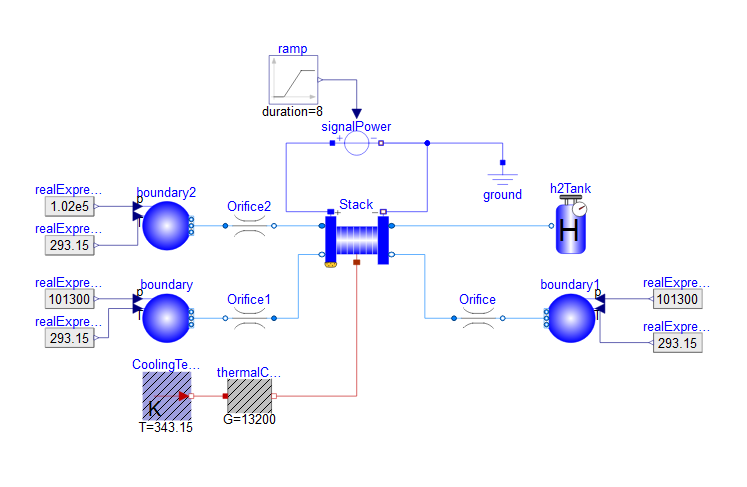
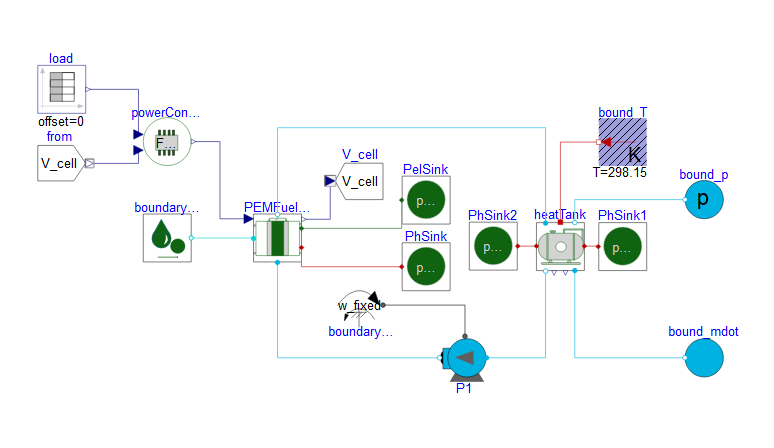
制氢储氢系统
制氢储氢系统将供应的电功率经过电解制氢系统被转换为氢气,产生的氢气存储在储氢罐中,当有用气需求时,供应给氢燃料电池及用气负荷。系统主要由电解制氢系统、氢燃料电池、储氢罐、储热罐等组成。
打开示例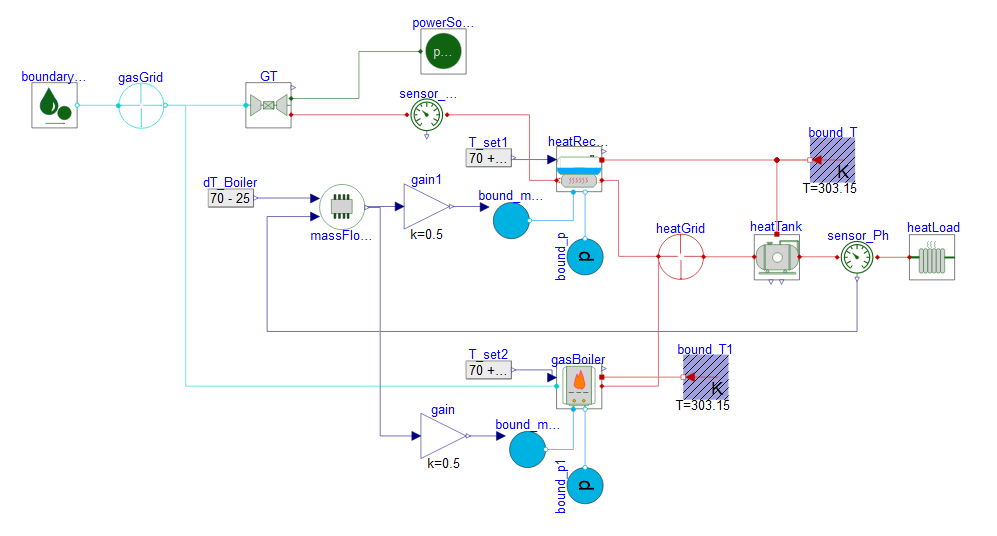
# 制造行业模型库
提示
单击打开示例后,可能会出现图形视图显示异常的情况,原因是未加载对应的模型库。此时单击主页工具栏检查按钮,会自动加载对应的模型库,通过检查后模型会正常展示。
# 卷料处理模型库
# 框图建模
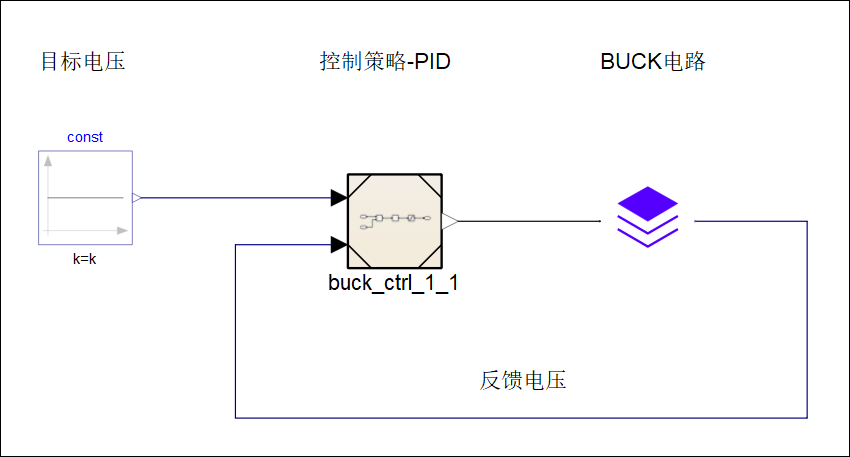
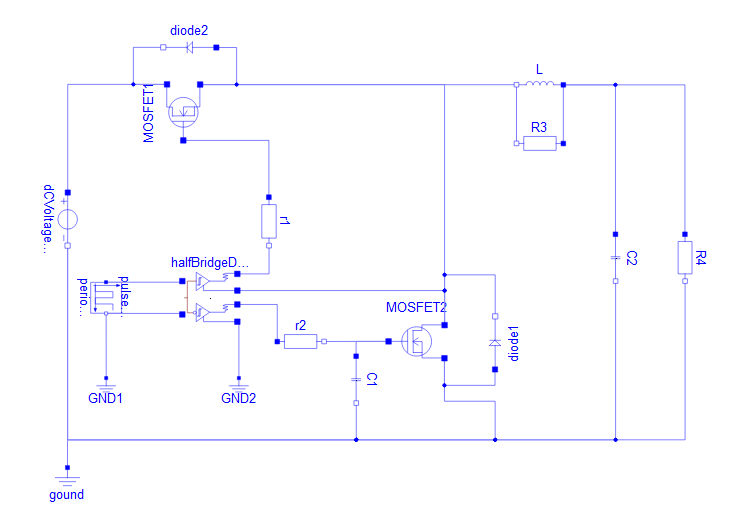
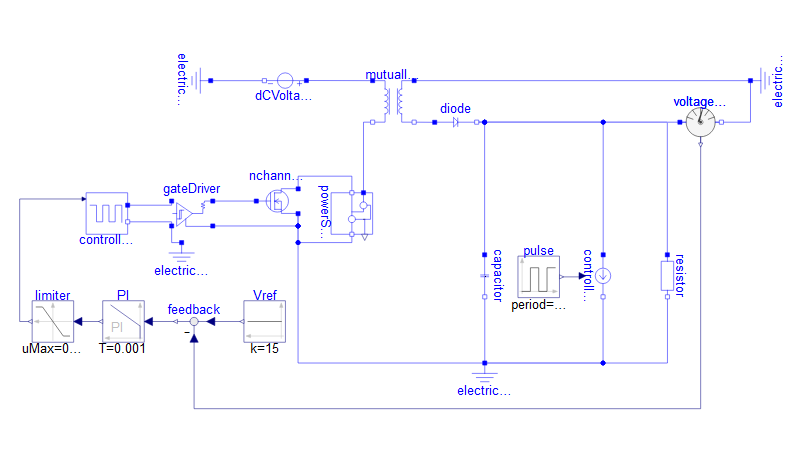
Buck 电路控制仿真
Buck 电路是一种常见的直流降压型开关电源,其基本功能是将较高的直流电压高效转换为较低的直流电压,广泛应用于手机充电器、电池管理系统、电机驱动器等场景中。其核心由功率开关管、电感、电容及续流二极管构成,通过高频率地控制开关元件的导通与关断,实现能量在电感与电容之间的传递和稳定输出。
打开示例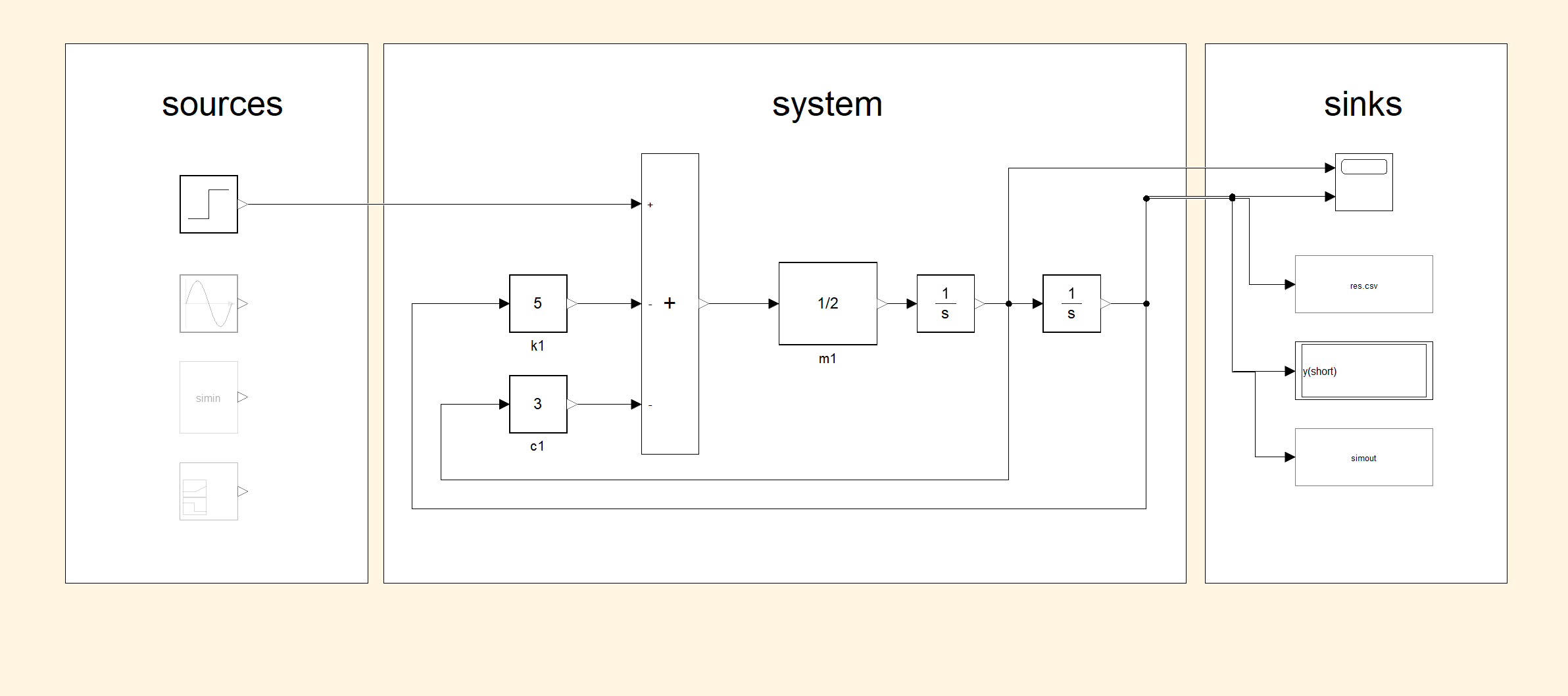
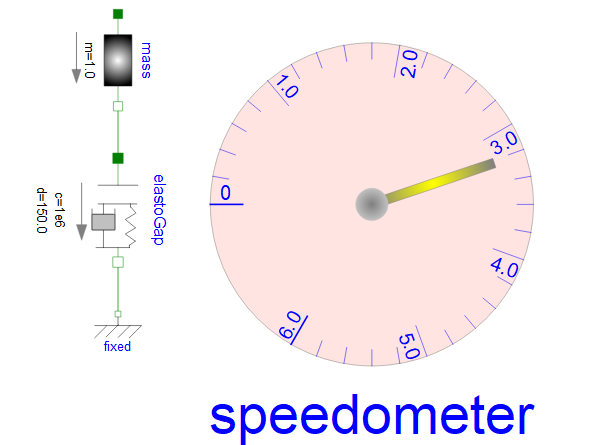
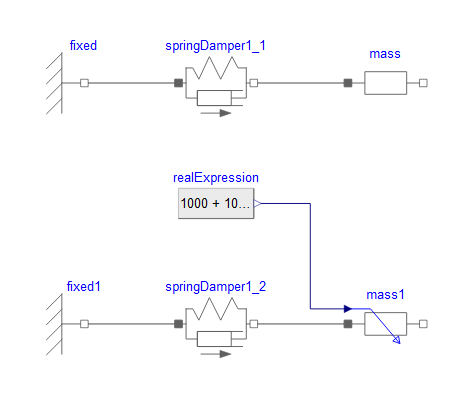
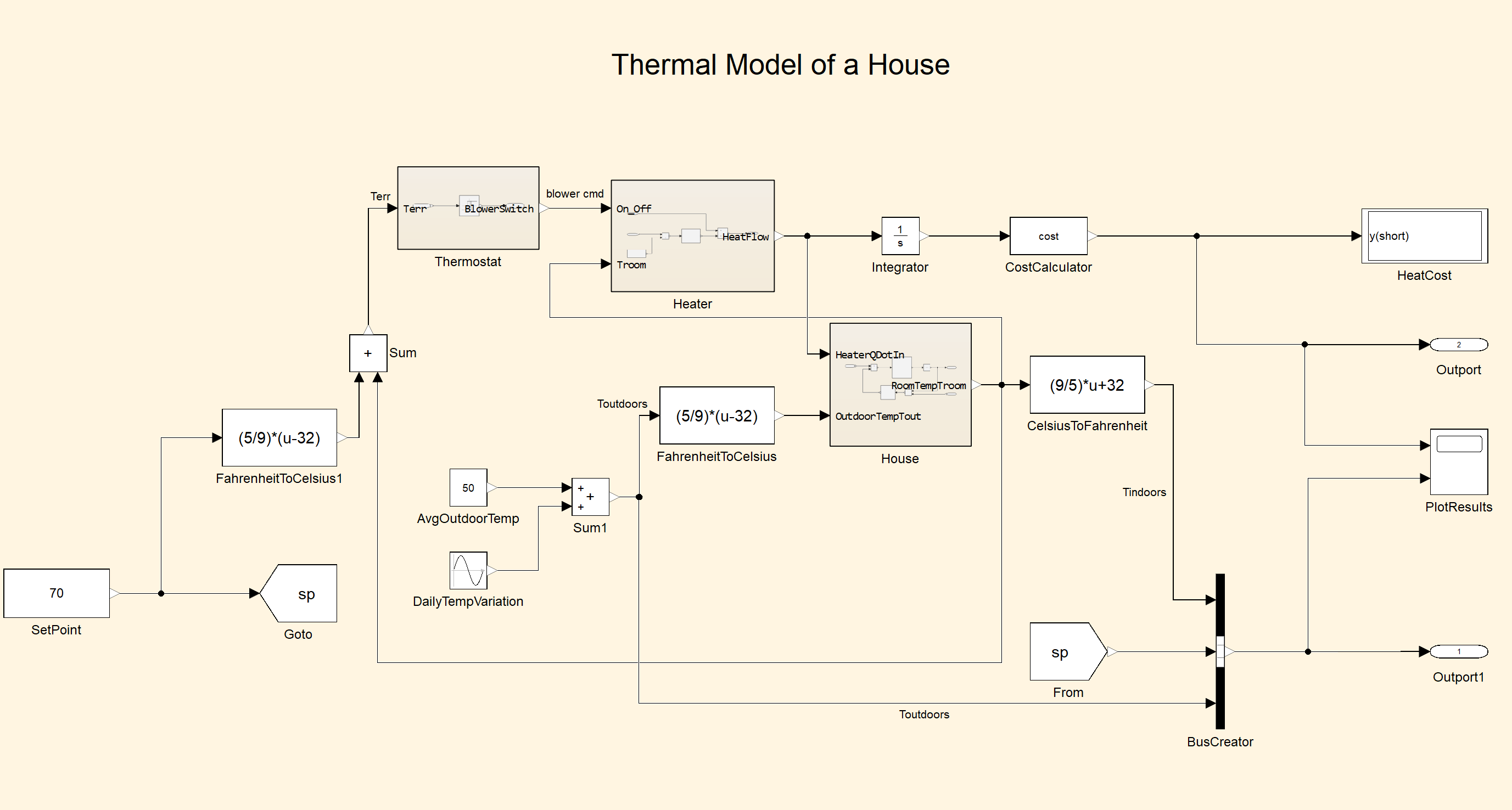
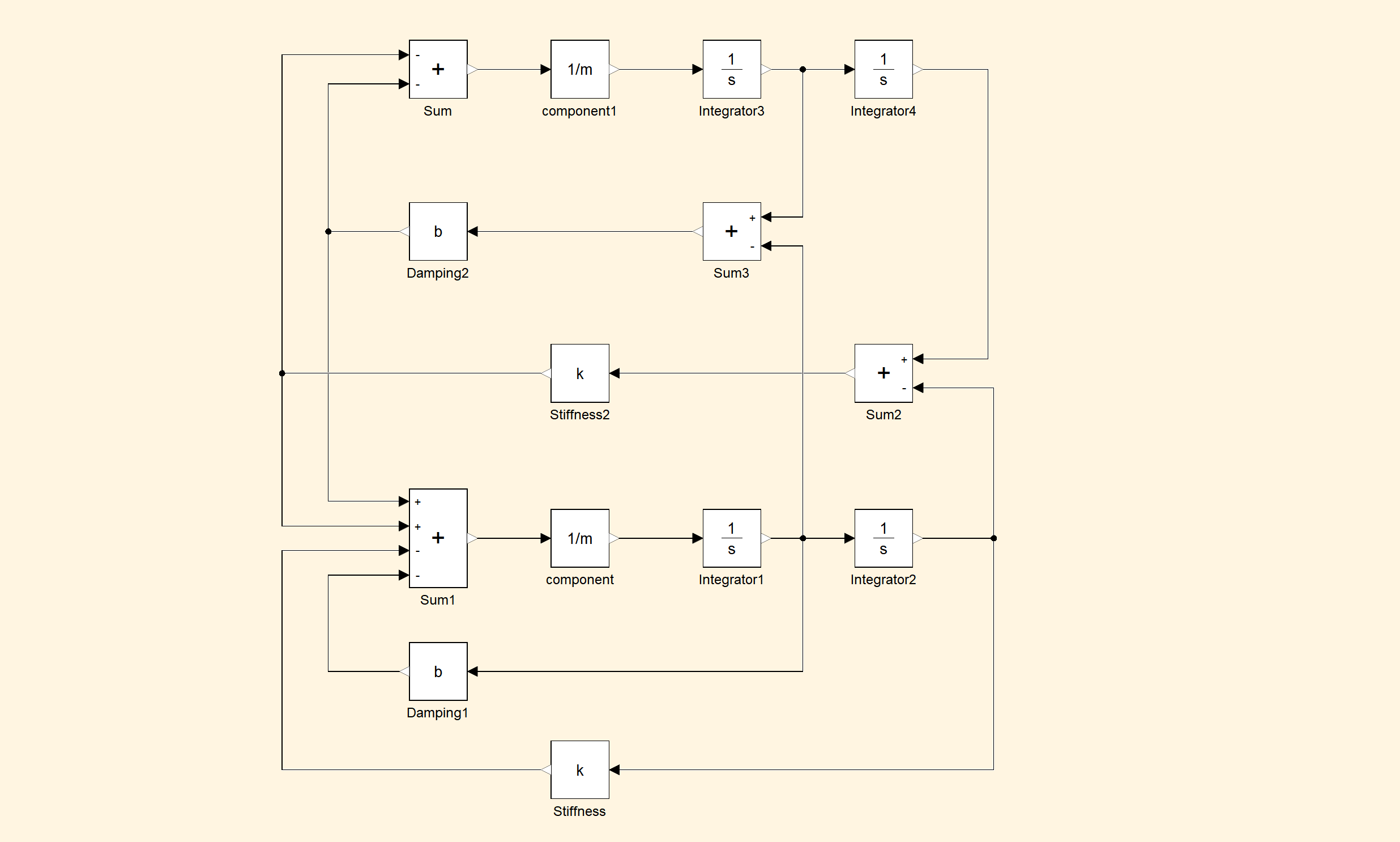
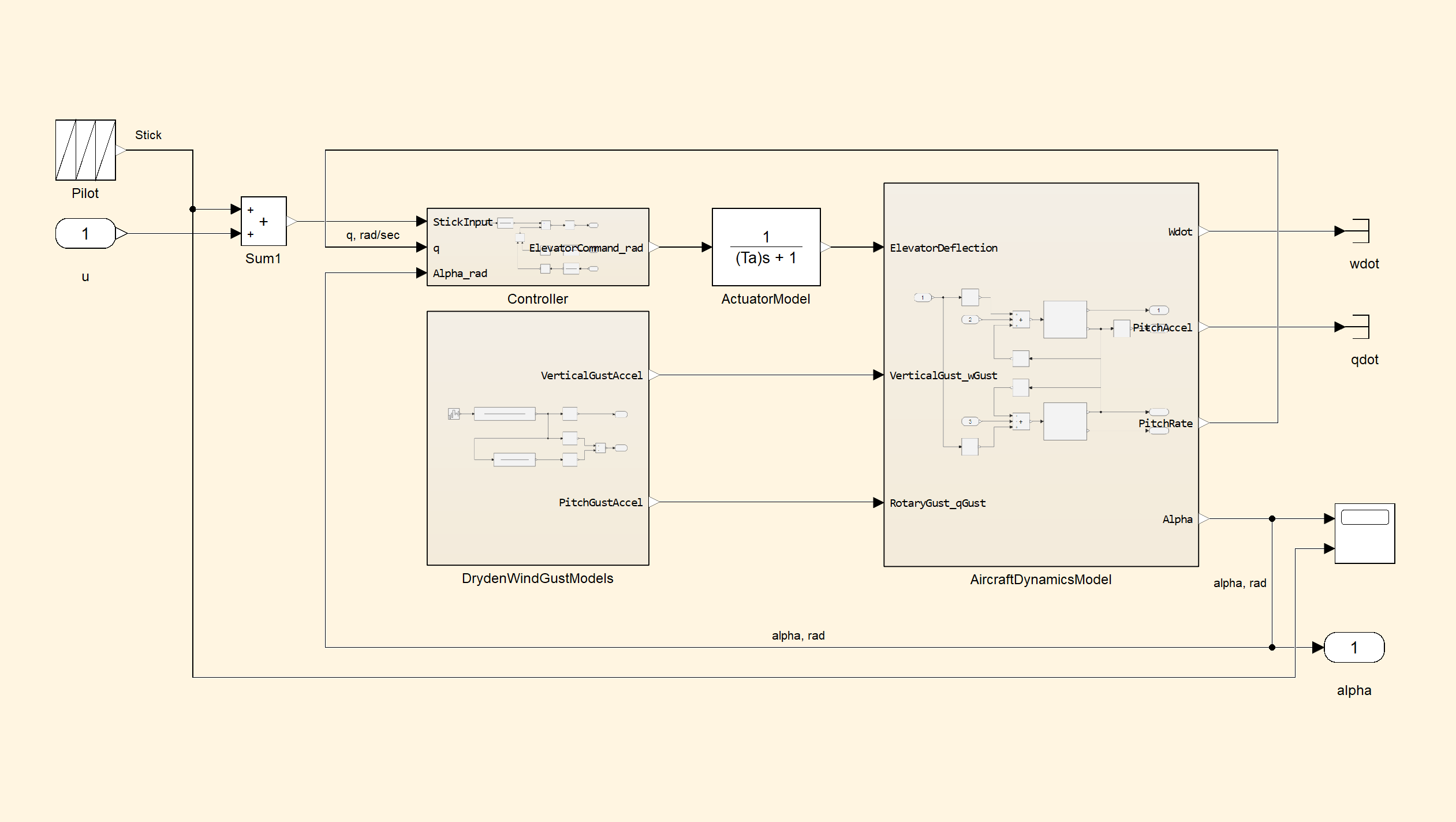
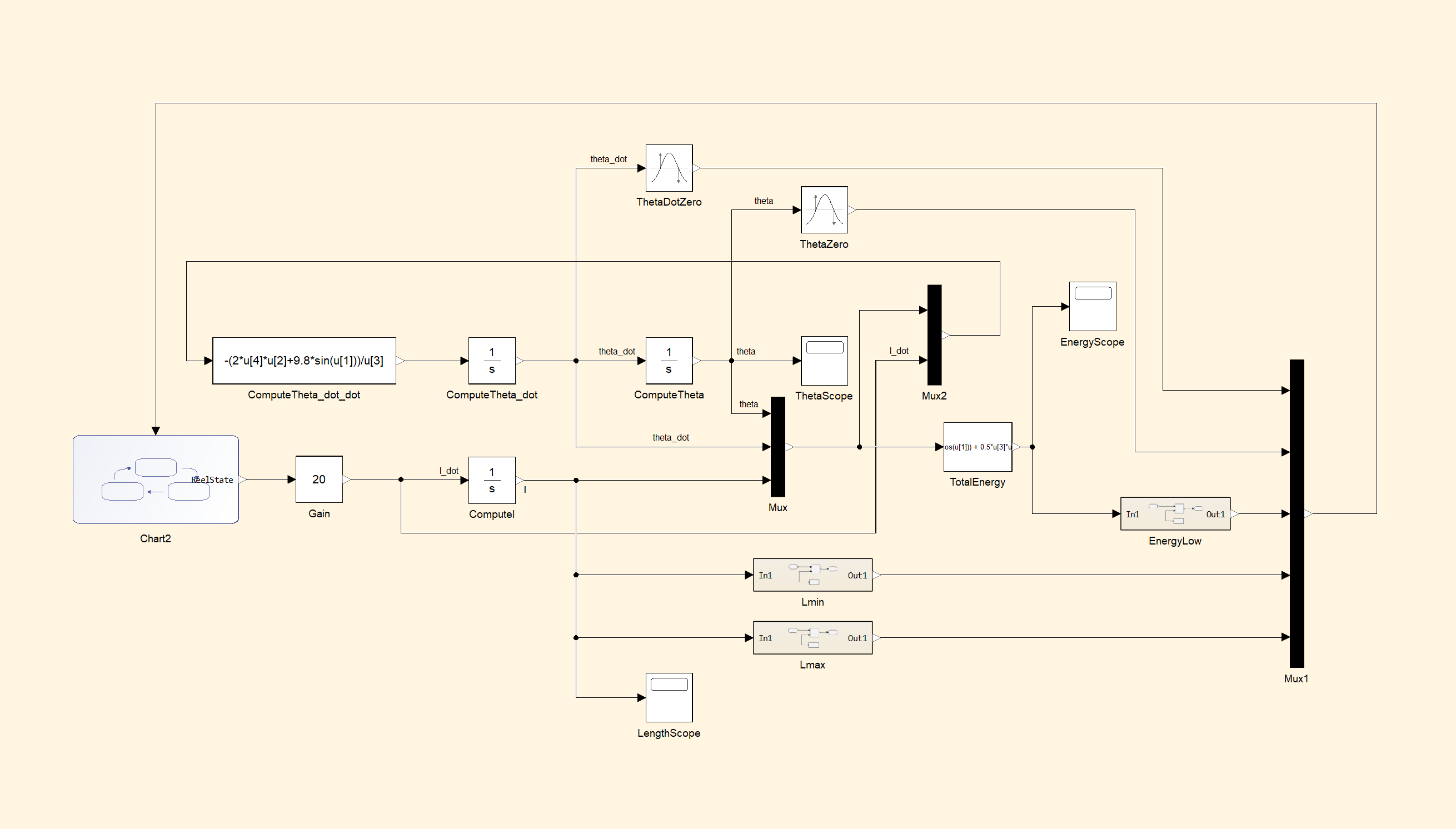
Sysblock 基础(1):对系统算法进行建模
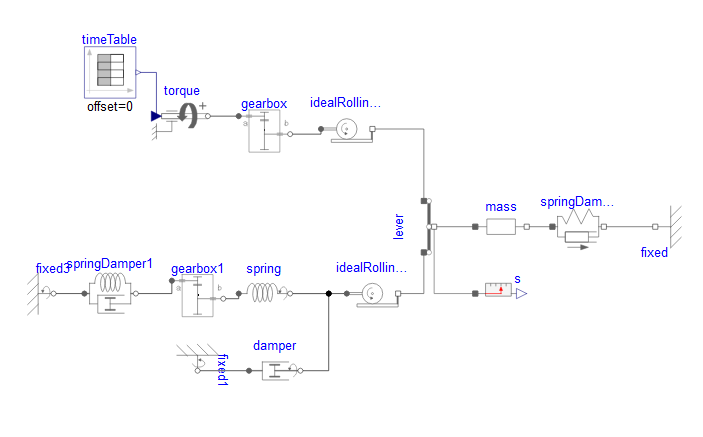
本文以质点 - 弹簧 - 阻尼机械系统为例,详细介绍如何使用 Sysblock 进行系统建模和仿真。通过本教程,读者可以了解 Sysblock 的基本操作流程,掌握系统建模的方法,以及学习使用不同类型的输入输出模块进行仿真分析。
打开示例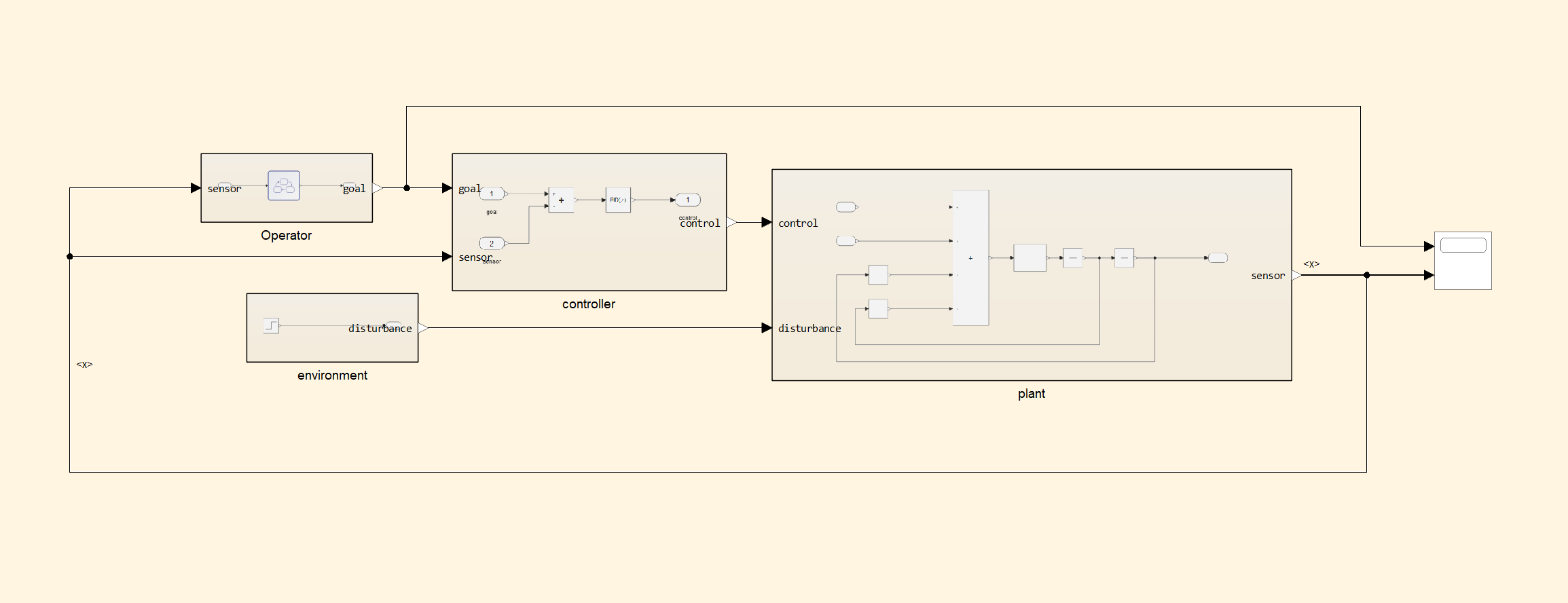
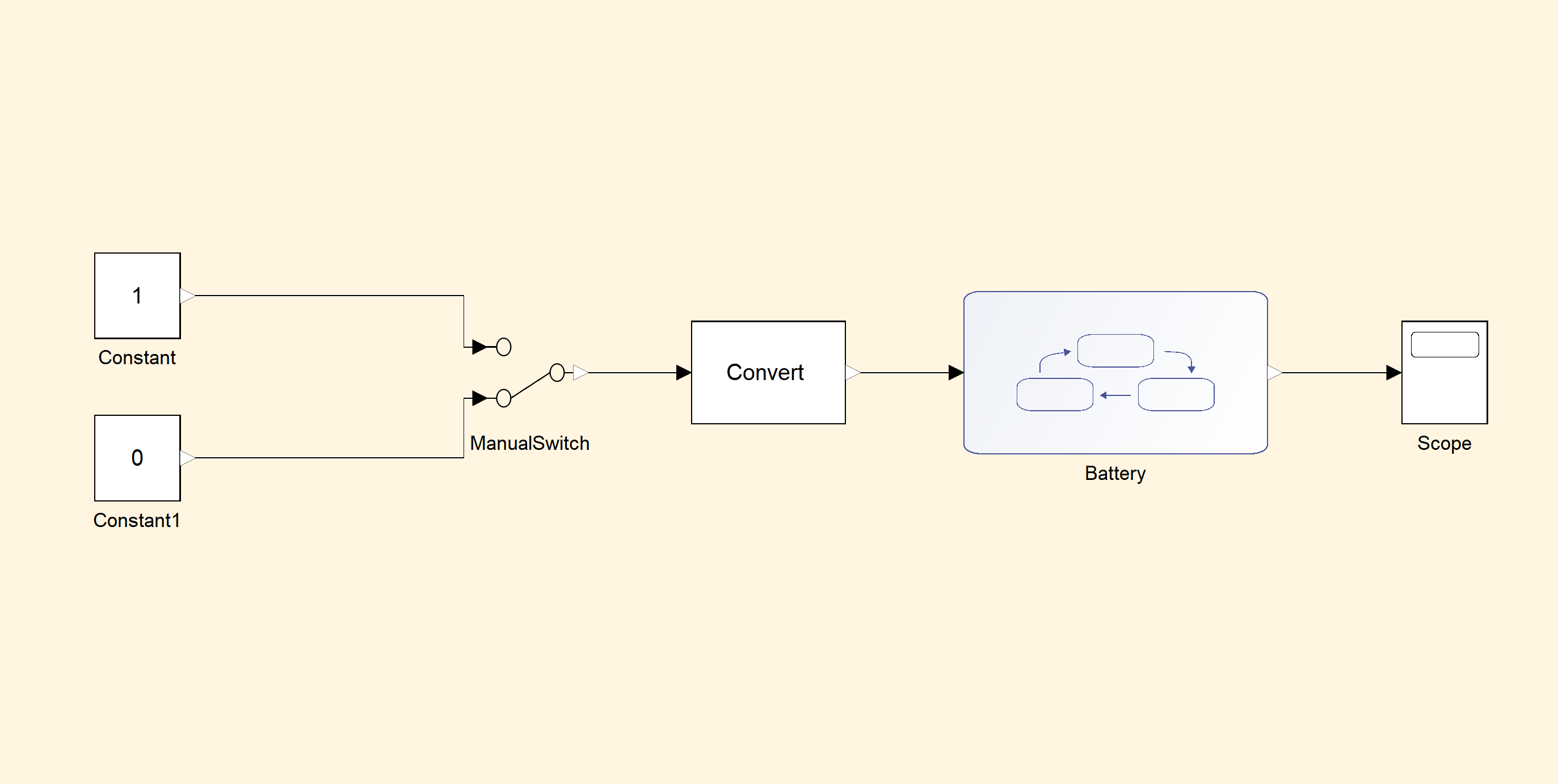
Sysblock 基础(2):创建模型组件
本文以 Sysblock 基础(1):对系统算法进行建模为基础,详细介绍如何使用 Sysblock 进行系统建模和仿真。通过本教程,读者可以了解 Sysblock 的基本操作流程,掌握状态机建模与子系统的创建。
打开示例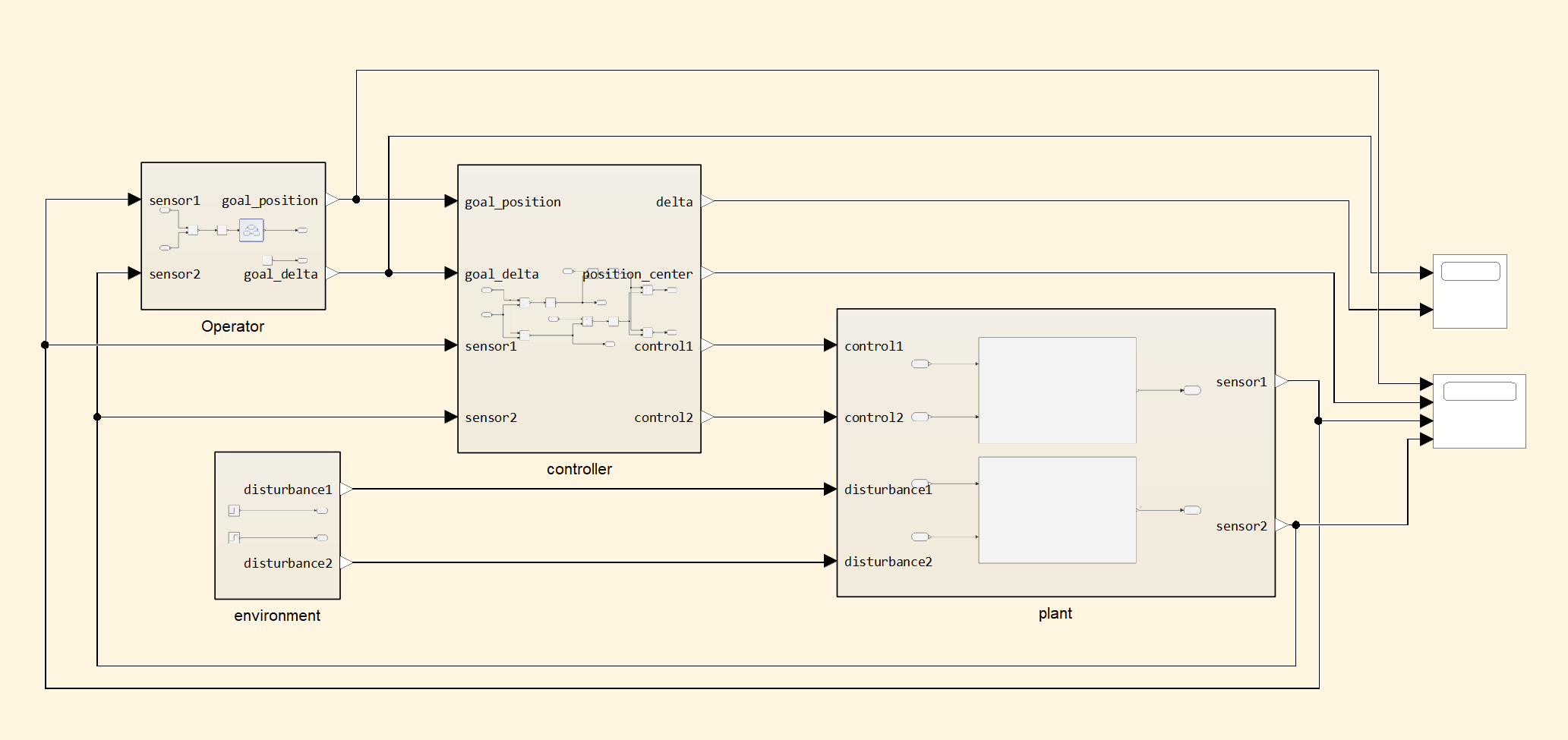
Sysblock 基础(3):记录仿真信号
本文以 Sysblock 基础(2):创建模型组件为基础,详细介绍如何使用 Sysblock 进行系统建模和仿真。通过本教程,读者可以了解 Sysblock 的基本操作流程,并学会如何记录仿真信号。
打开示例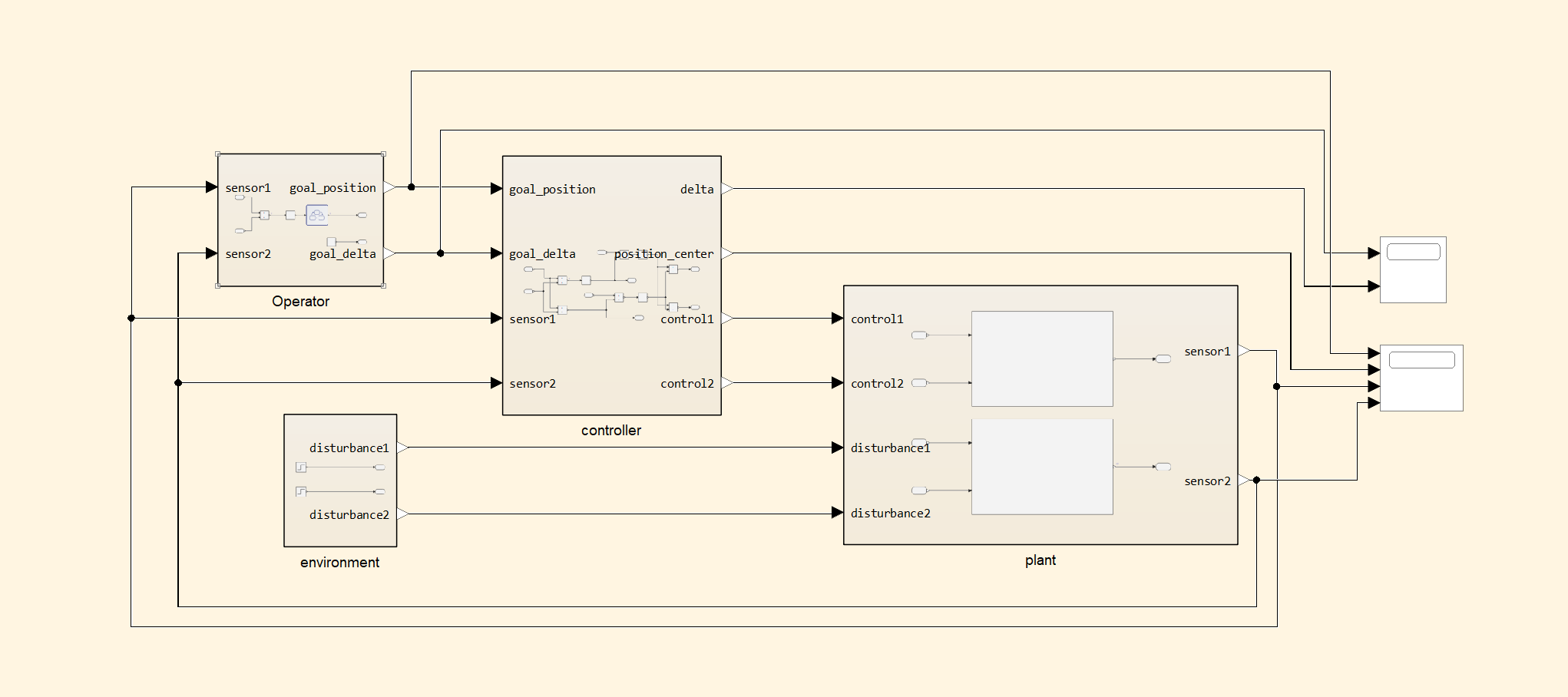
Sysblock 基础(4):管理模型数据
本文以 Sysblock基础(3):记录仿真信号为基础,详细介绍如何使用 Sysblock 进行系统建模和仿真。通过本教程,读者将掌握 Sysblock 的基本操作流程,学会使用模型数据管理器来设置参数的值、数据类型和其他特性。
打开示例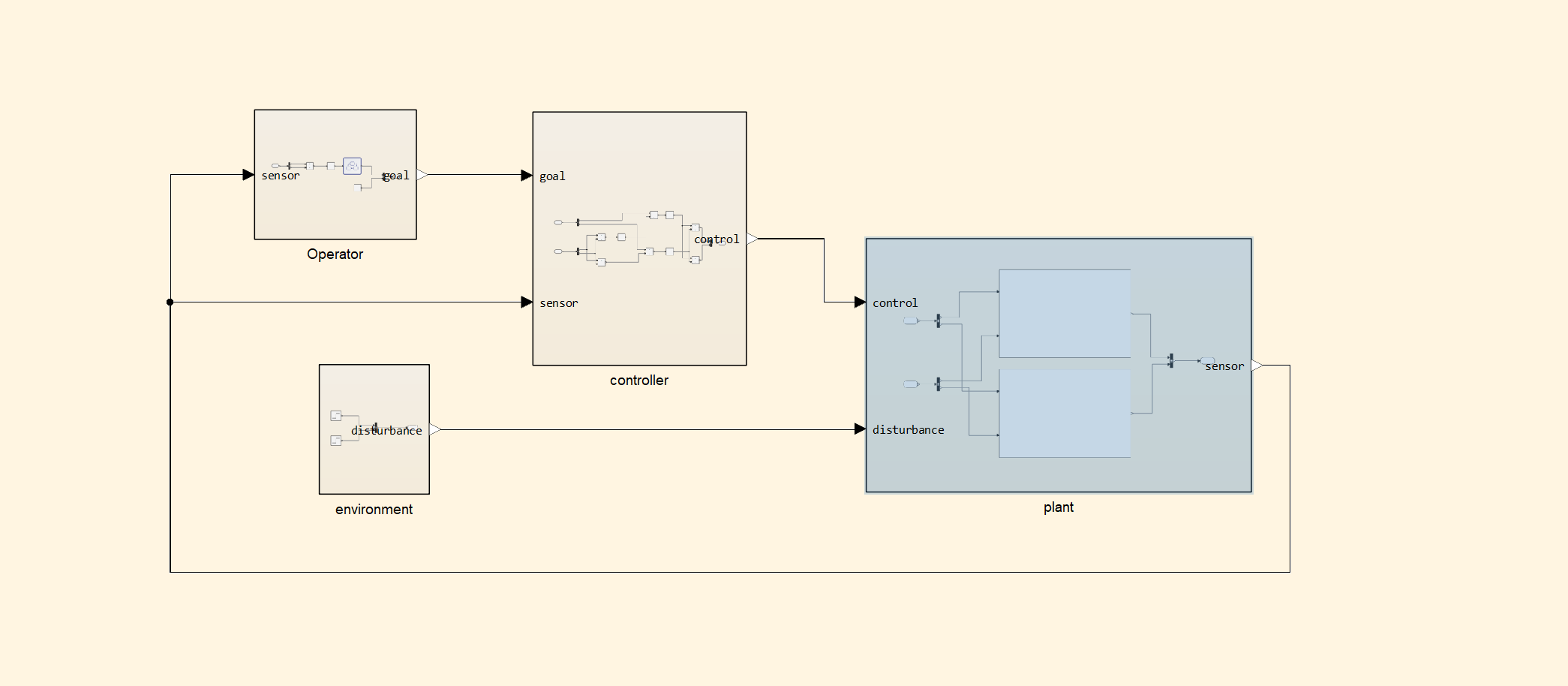
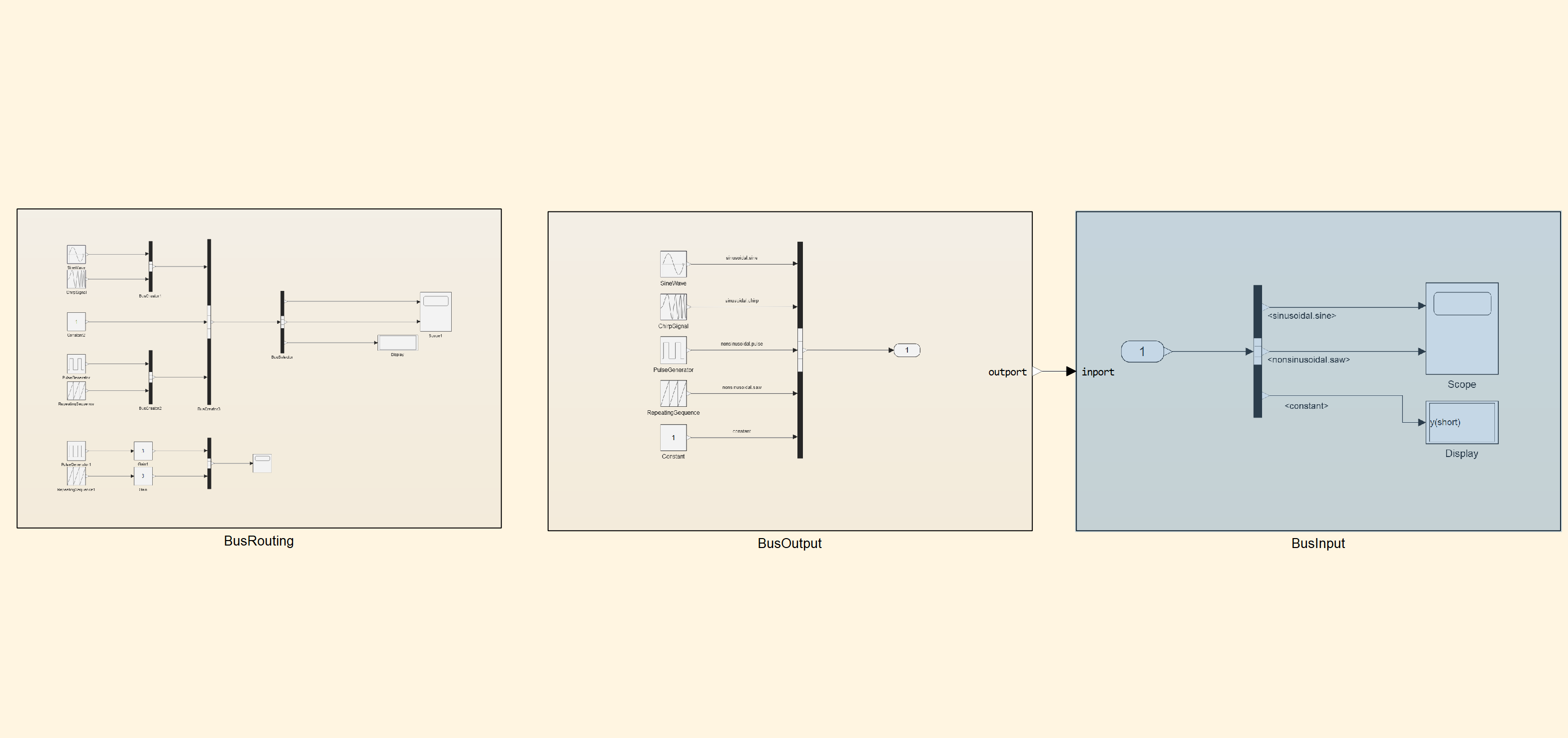
Sysblock 基础(5):总线管理
本文以 Sysblock 基础(4):管理模型数据基础,详细介绍如何使用 Sysblock 进行系统建模和仿真。通过本教程,读者可以了解 Sysblock 的基本操作流程,学会如何减少信号线的数量来简化模型。
打开示例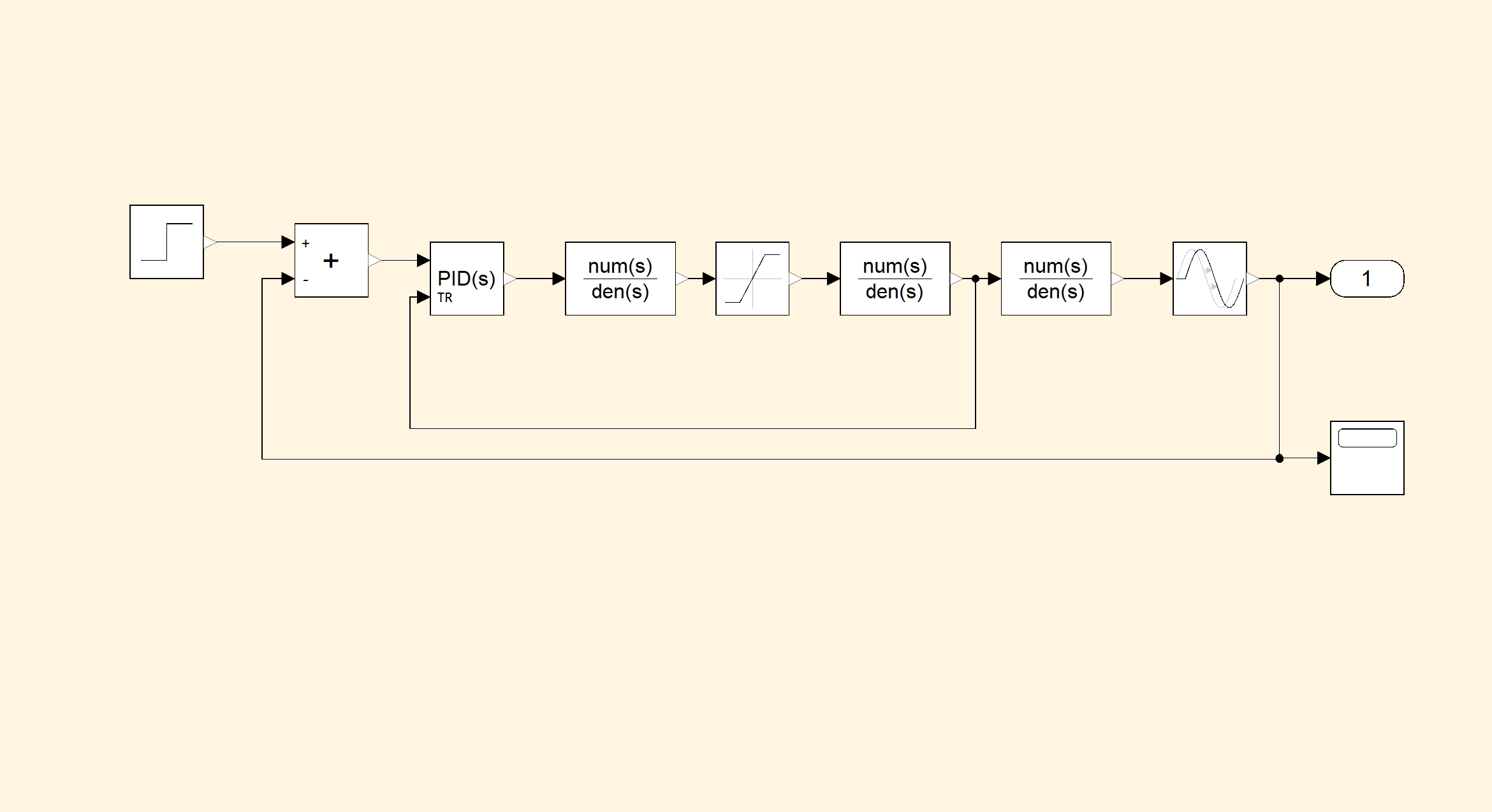
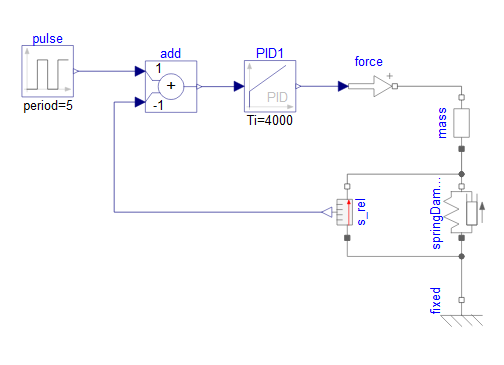
使用 PID Controller 模块进行抗饱和控制
此示例展示在执行器发生饱和时,如何通过抗饱和策略避免 PID 控制器出现积分饱和。Sysblock 中的 PID Controller 模块内置 “ 反算 ” 抗饱和方法,并提供 “ 跟踪模式 ” 以应对更复杂的工业场景。
打开示例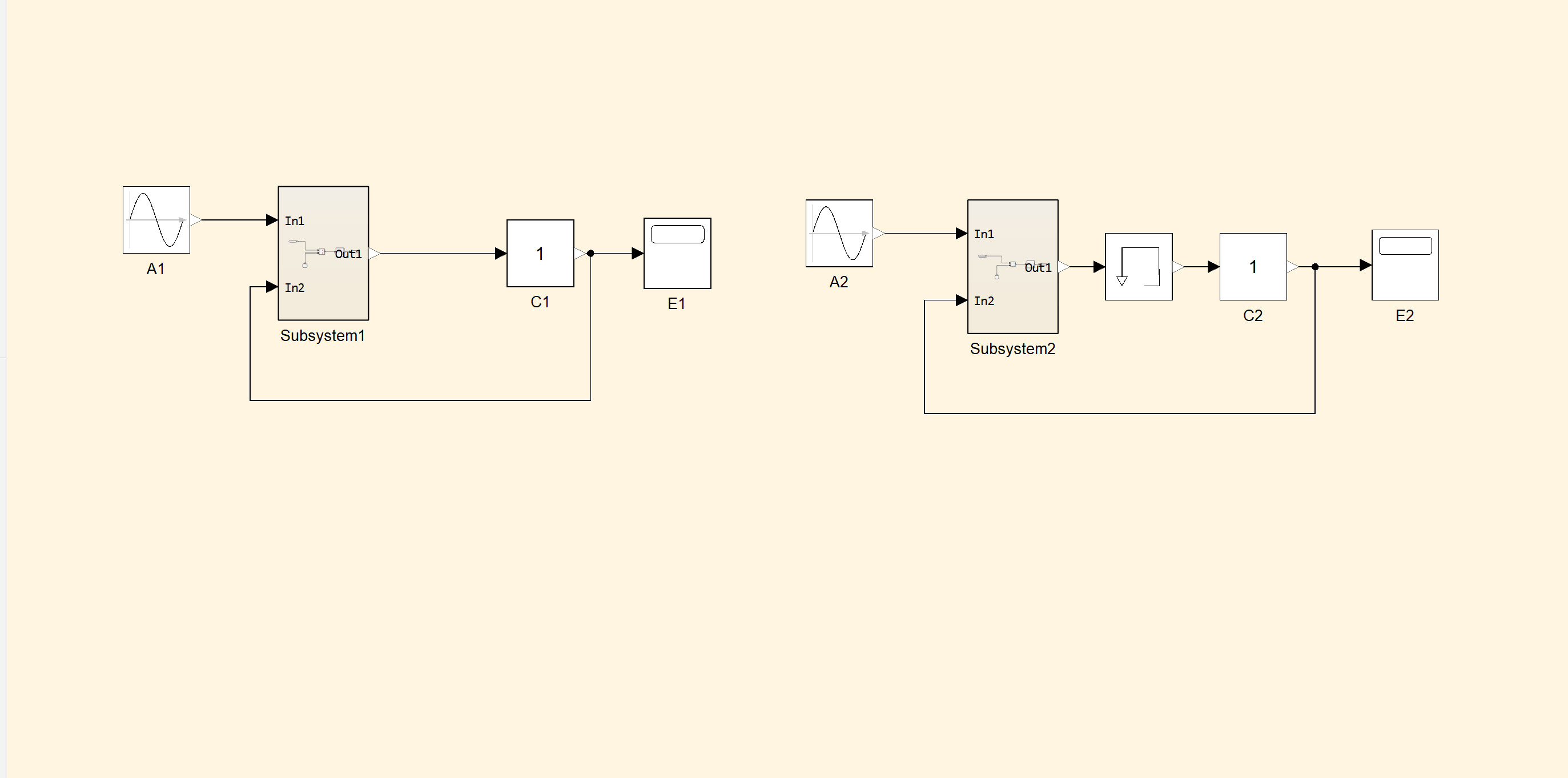
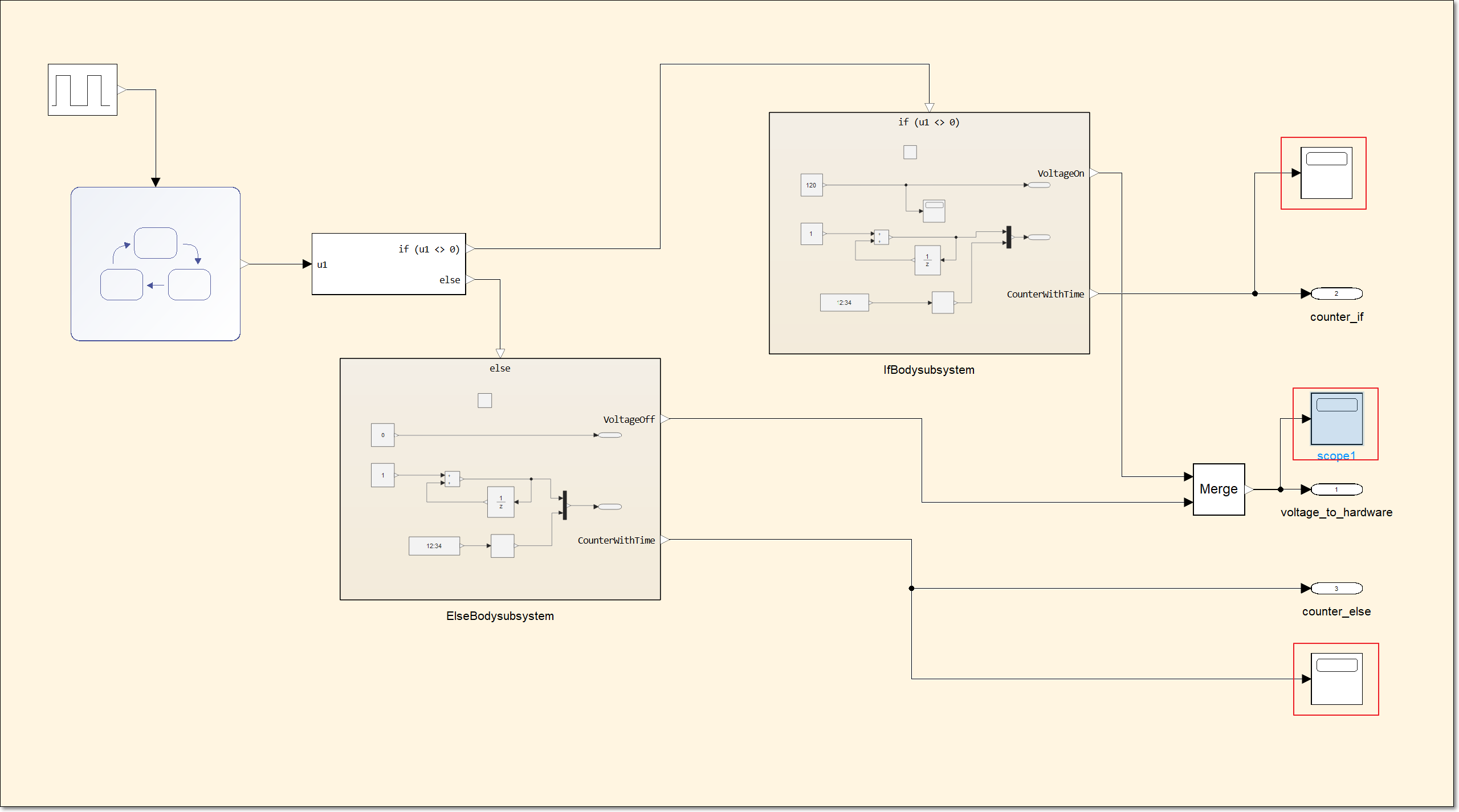
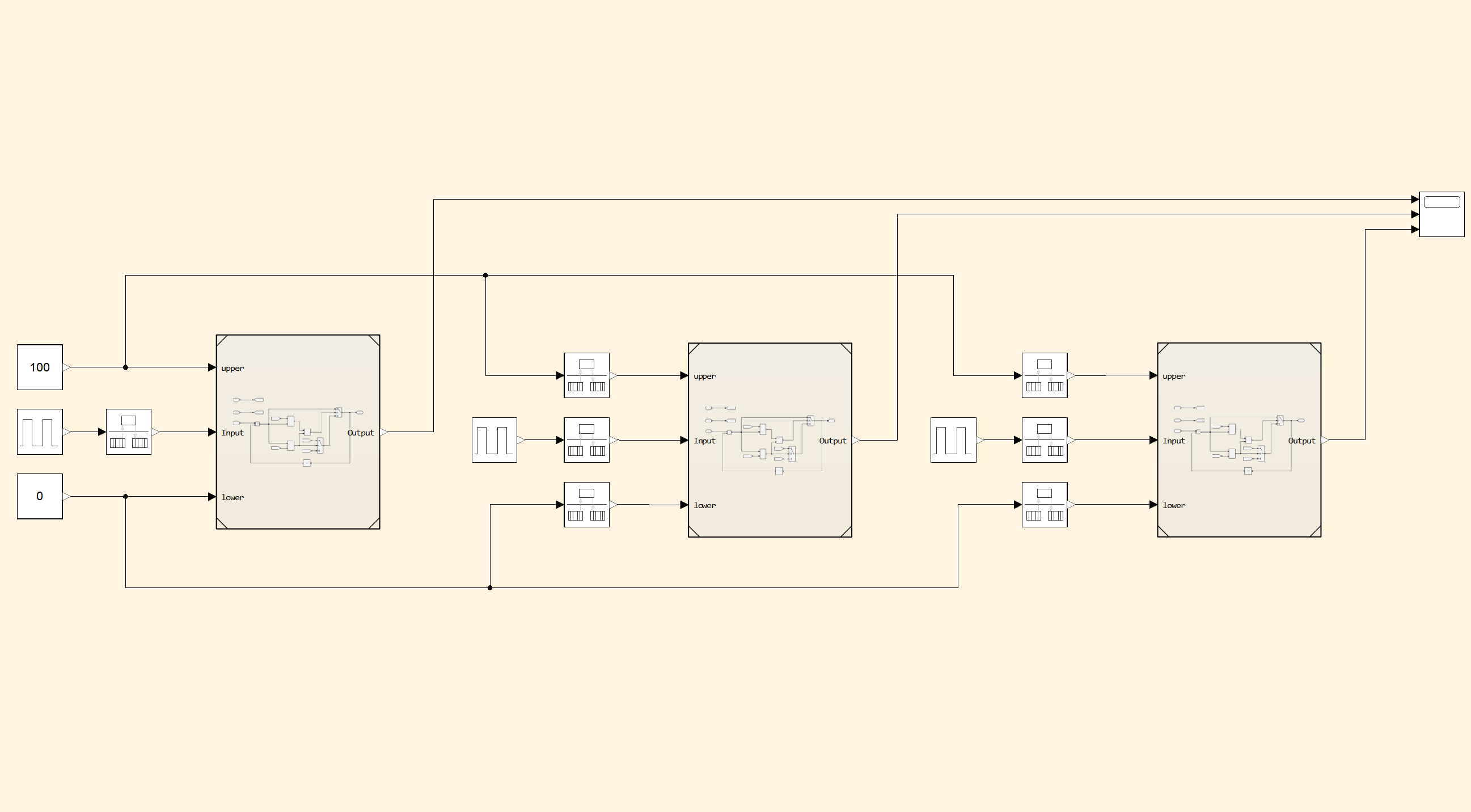
基于 If 模块与动作子系统的条件控制
此示例展示了如何用状态机产生控制信号,并通过 If 模块选择性地激活不同的动作子系统:当 u1 为非零时开启电压并计数,否则关闭电压并计数。通过 merge 模块将分支输出统一到硬件端口,实现清晰高效的决策执行,同时便于统计各分支的运行次数。
打开示例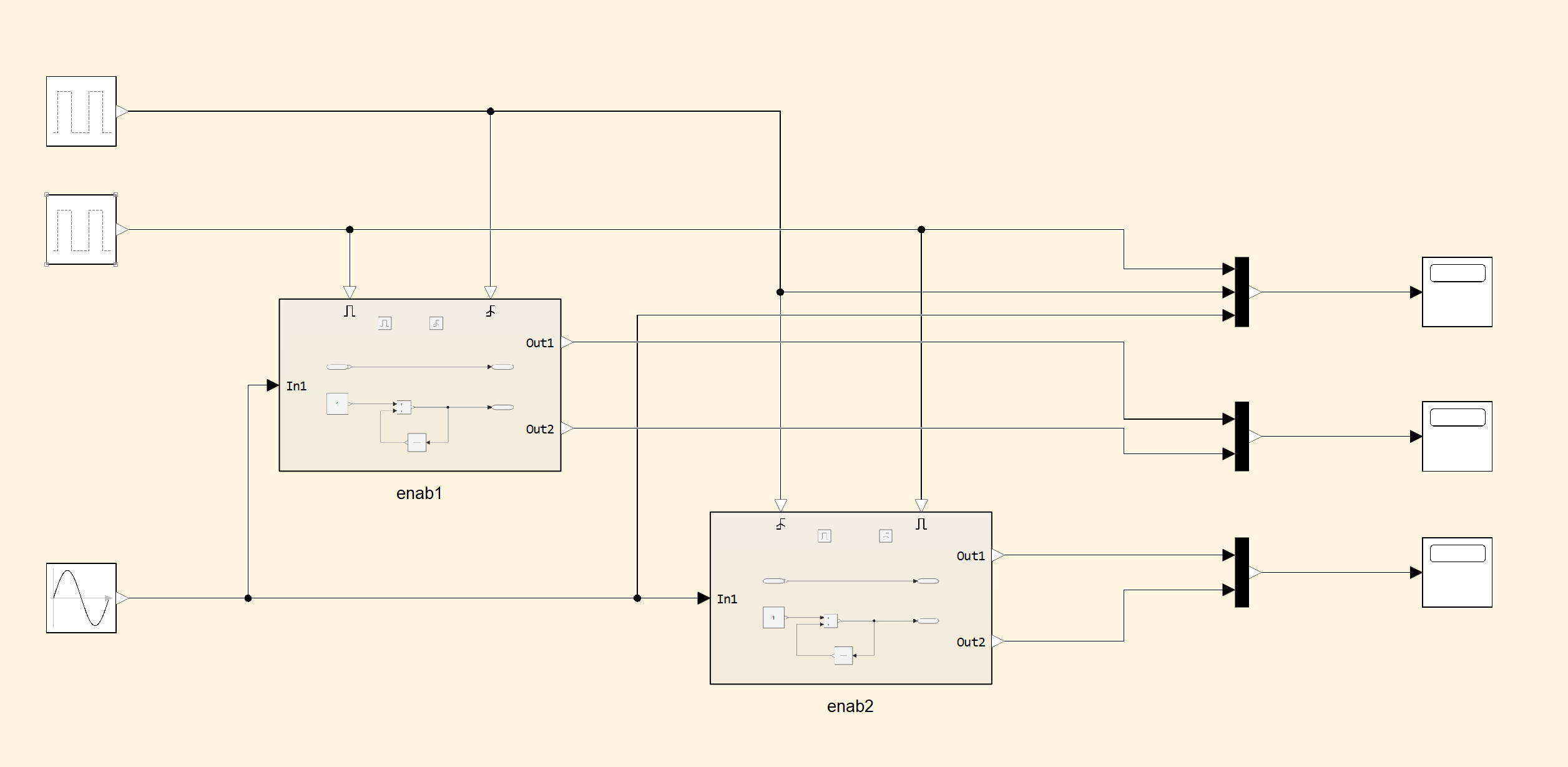
触发的使能子系统
此示例展示了 Sysblock 中带触发的使能子系统的完整搭建过程,通过配置不同的使能状态(reset 和 held)和触发类型(rising),展示了子系统在事件驱动控制下的执行行为,并进行相关仿真。
打开示例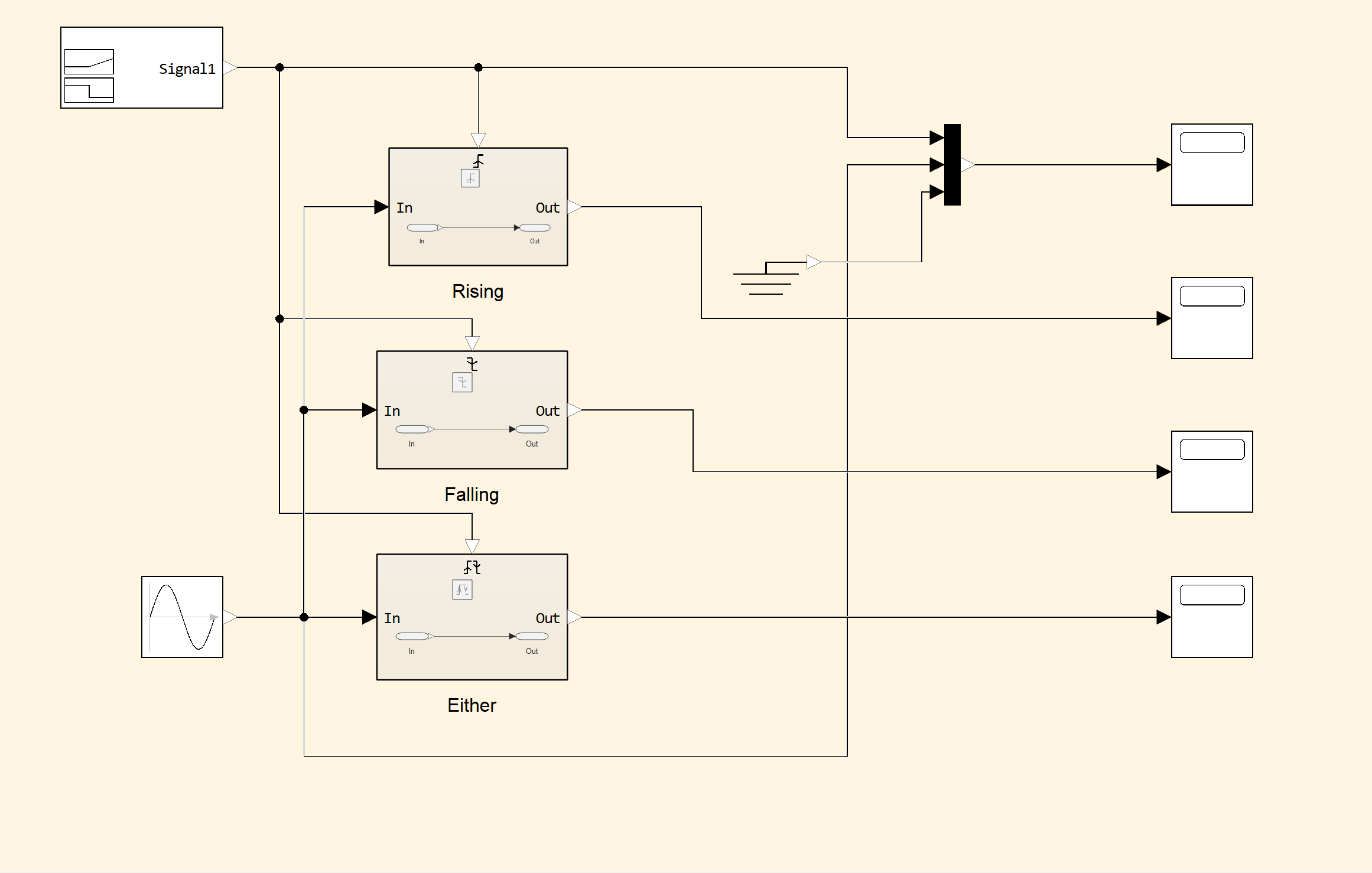
触发子系统
此示例展示了 Sysblock 中触发子系统的完整搭建过程,通过配置不同的触发类型(rising、falling、either),展示了子系统在事件驱动控制下的执行行为,并进行相关仿真。
打开示例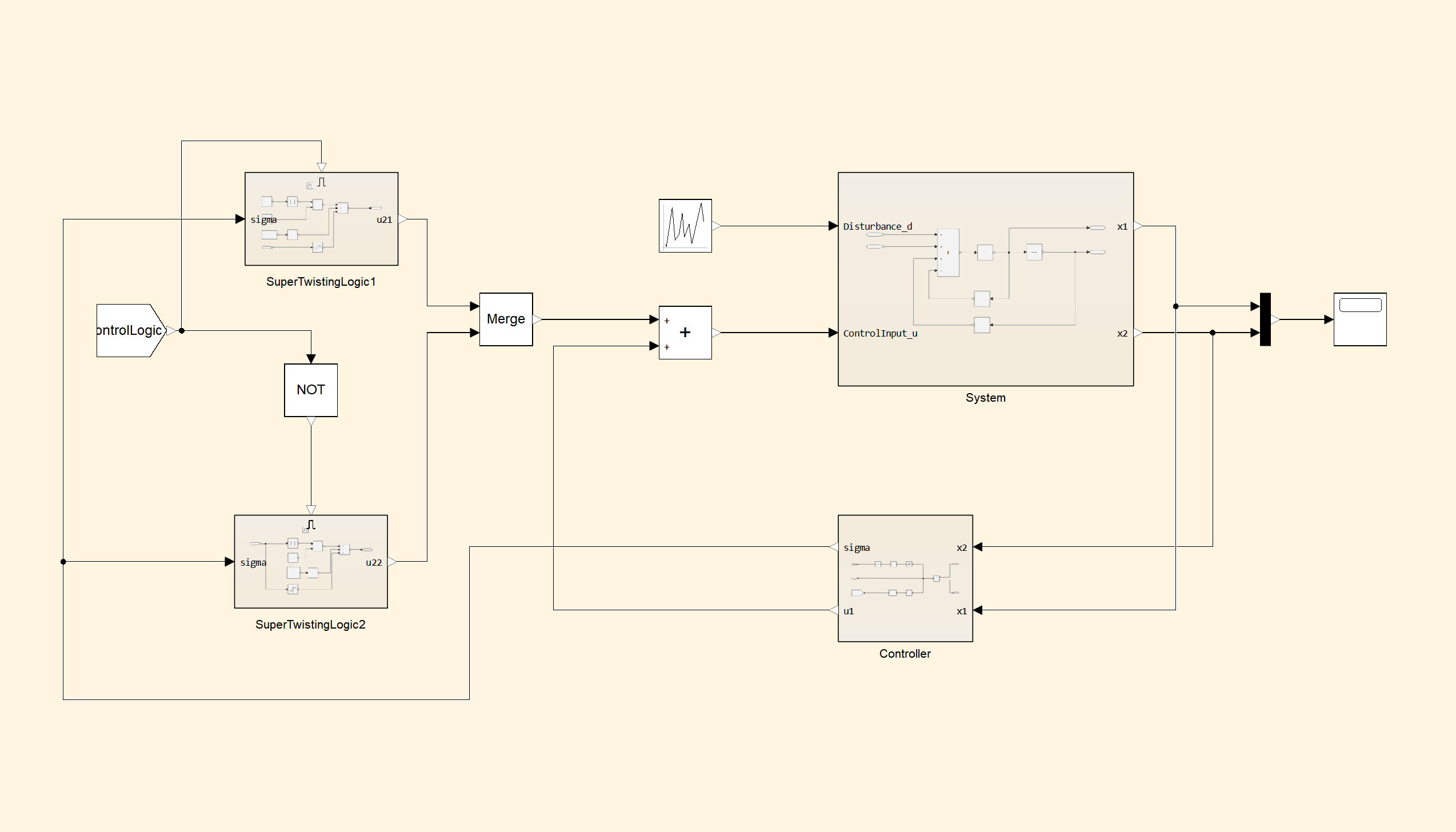
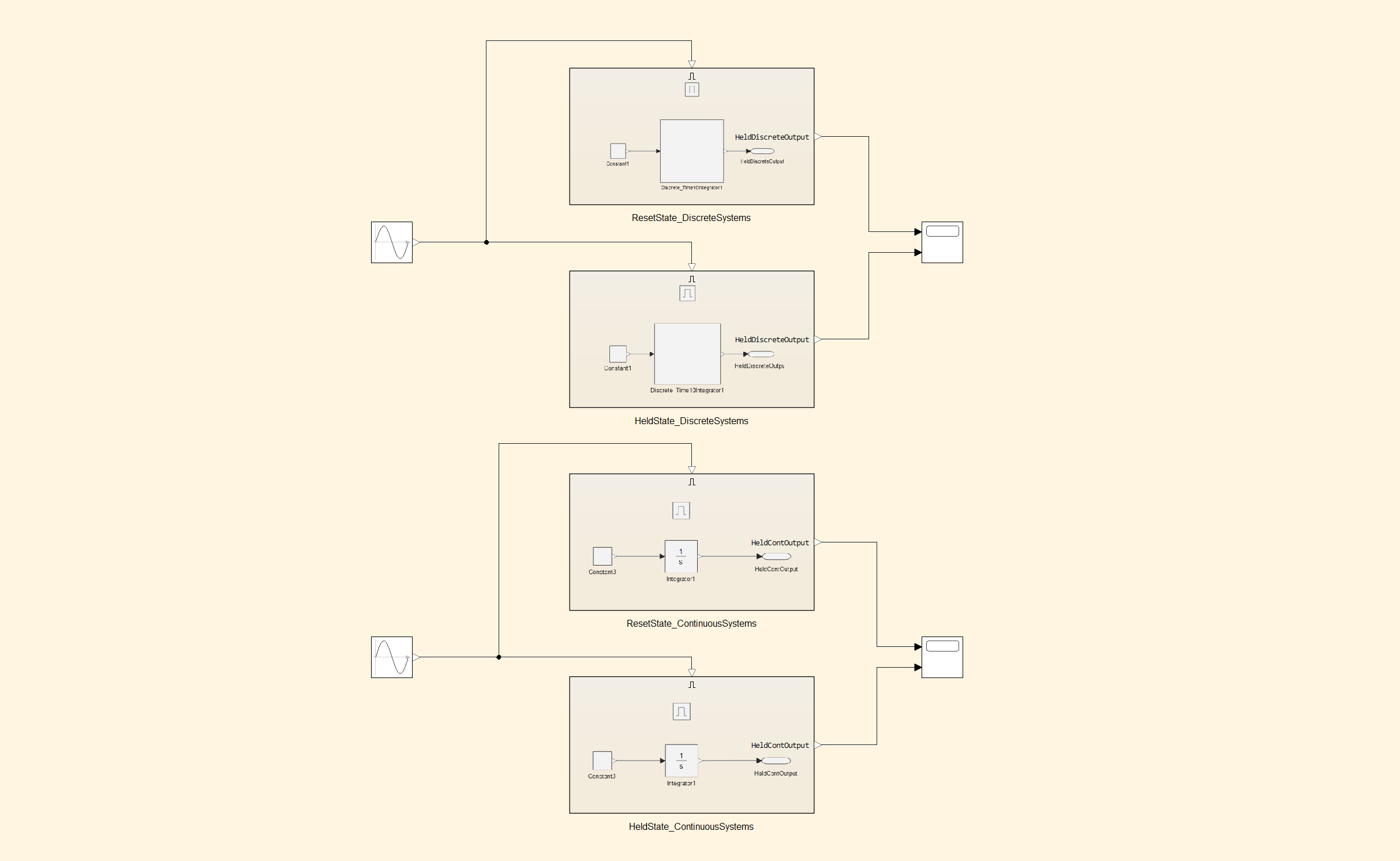
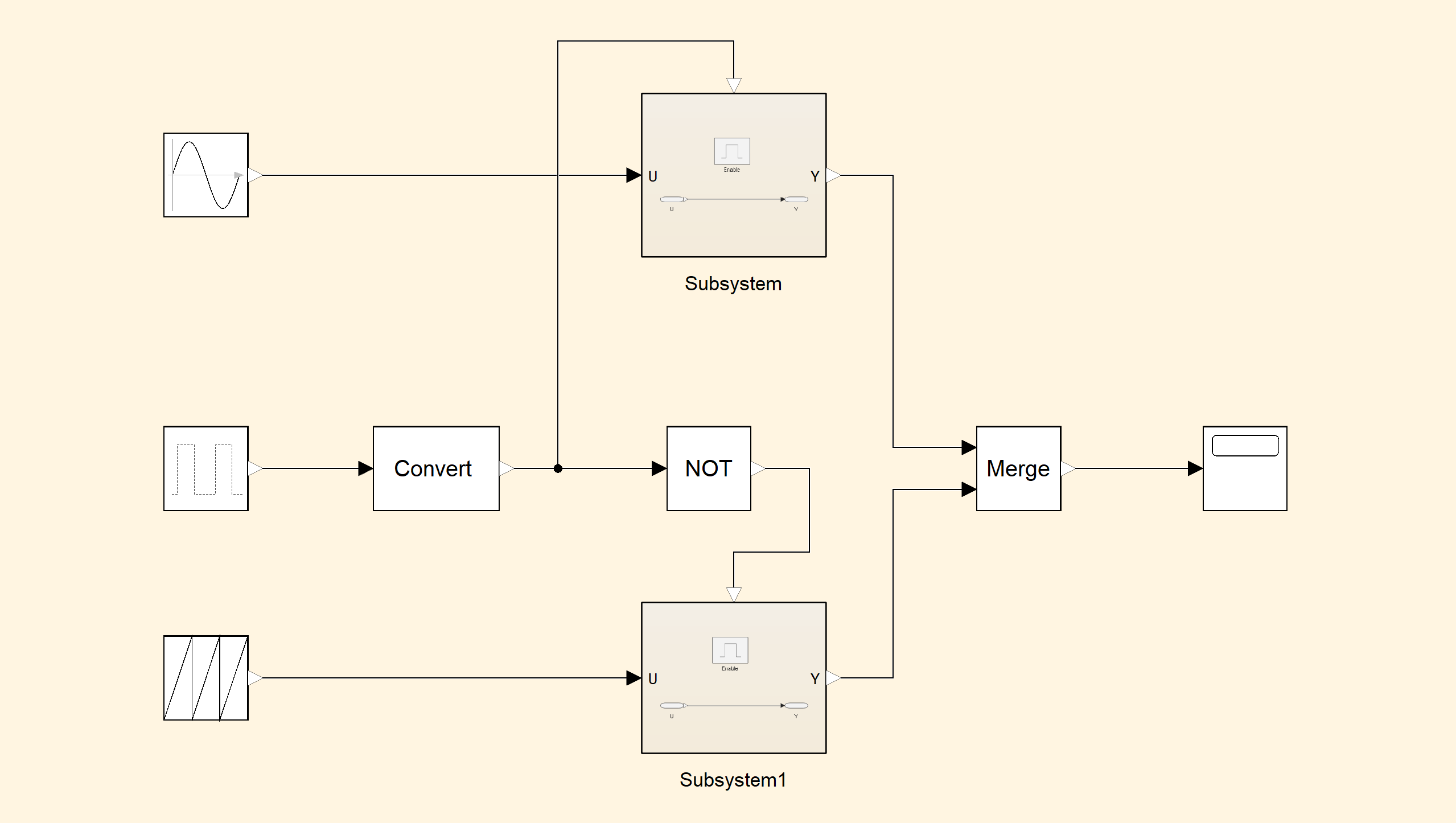
连续与离散使能子系统
此示例展示了 Sysblock 中离散控制信号和连续控制信号的处理流程,以及复位状态和保持状态两种管理机制的不同输出行为,展示了子系统在条件驱动控制下的执行行为,并进行相关仿真。
打开示例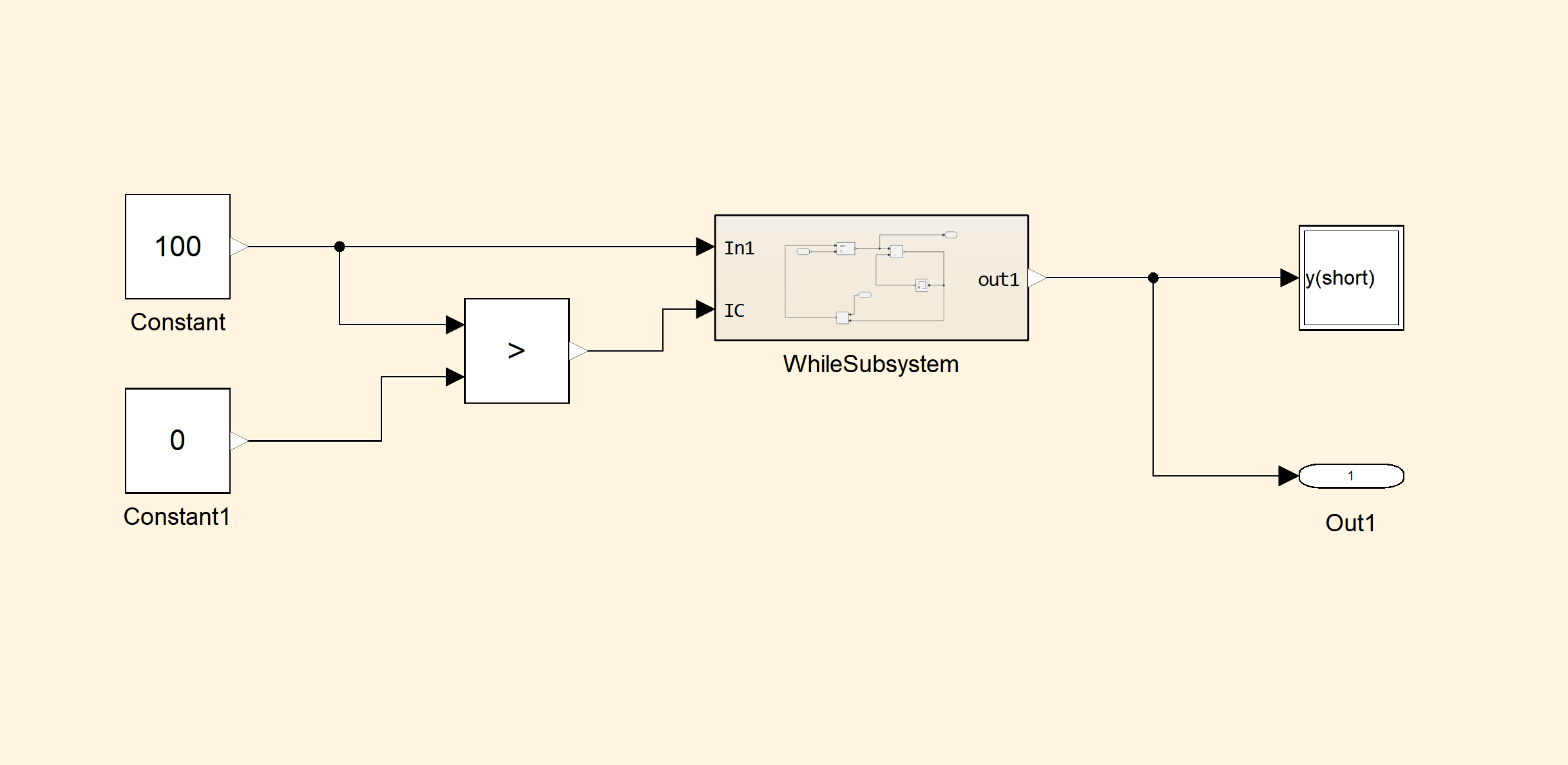
While 循环子系统
此示例展示了 Sysblock 中 While 子系统的迭代执行机制,以及 Whilelterator 模块的条件控制与最大迭代次数设置,展示了子系统在条件驱动下的重复执行行为,并演示了逐次累加直至满足阈值的处理流程,进行相关仿真。
打开示例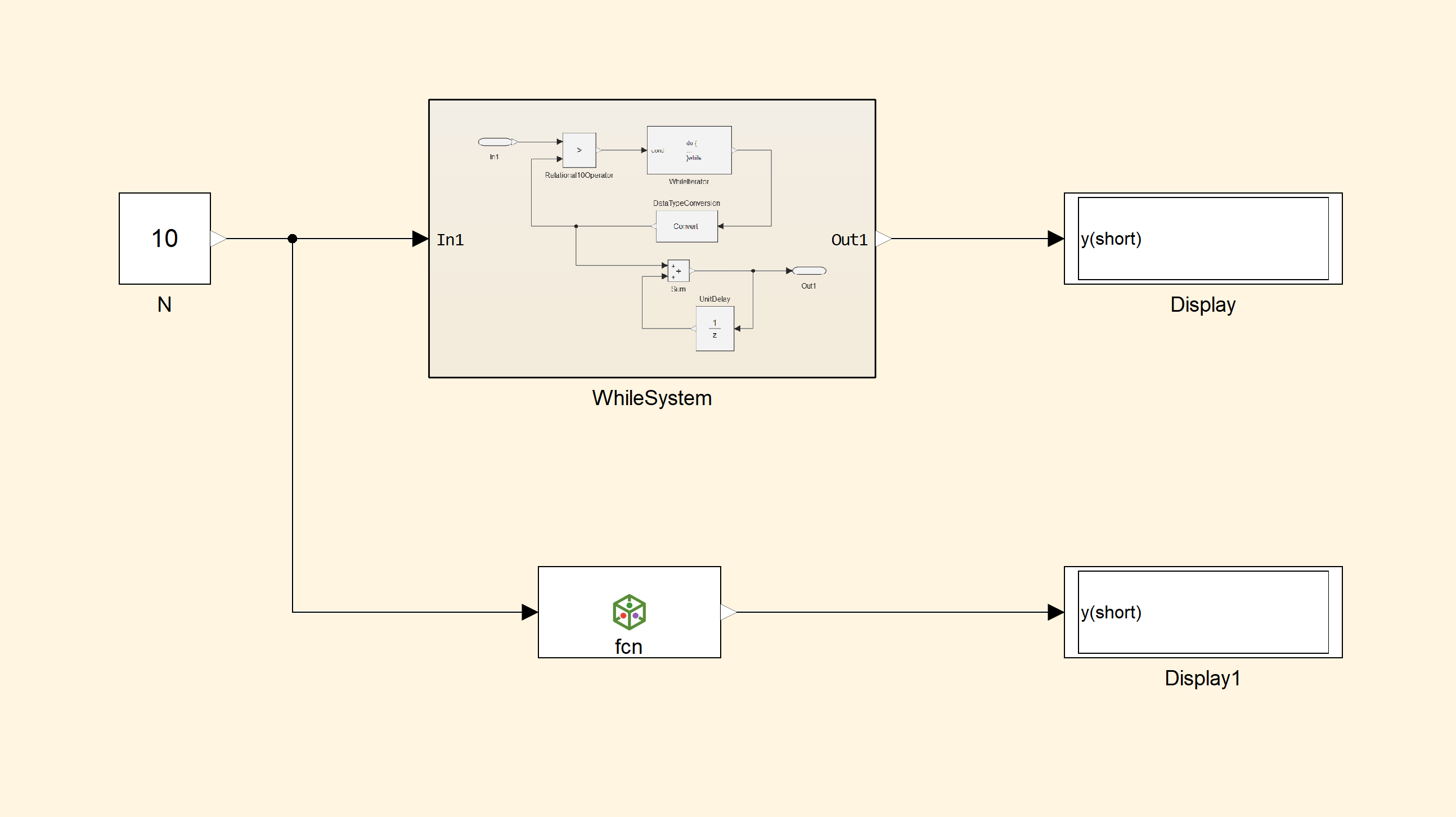
Do_While 循环子系统
此示例展示了 Sysblock 中 Do-While 子系统的先执行后判断迭代机制,以及 Whilelterator 模块的条件控制与最大迭代次数设置,展示了子系统在条件驱动下的重复执行行为,并演示了逐次累加直至满足给定上限 N 的处理流程,进行 1 到 N 求和的仿真。
打开示例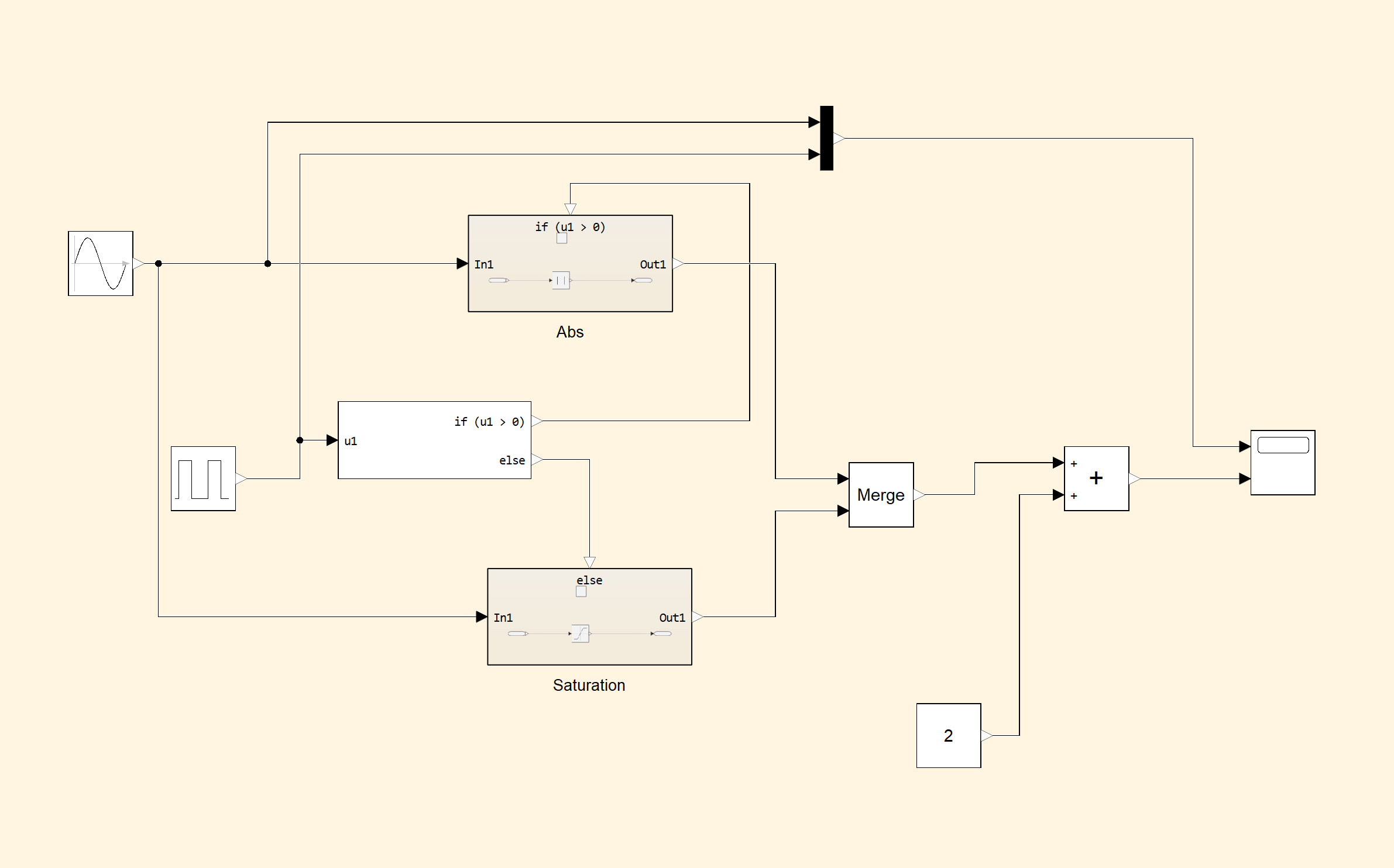
使用状态保持的 If 模块示例
此示例展示了 Sysblock 中 If-Action 子系统在“状态保持”管理机制下的条件选择与执行流程,以及基于 if(u1>0) 的分支控制;展示了子系统在禁用阶段保持内部状态与可选保持输出的行为,并演示分支重新使能后从历史状态继续计算的现象。示例采用 Abs 与 Saturation 分支、merge 合并与偏置求和的结构,在 scope 中观察连续输出。
打开示例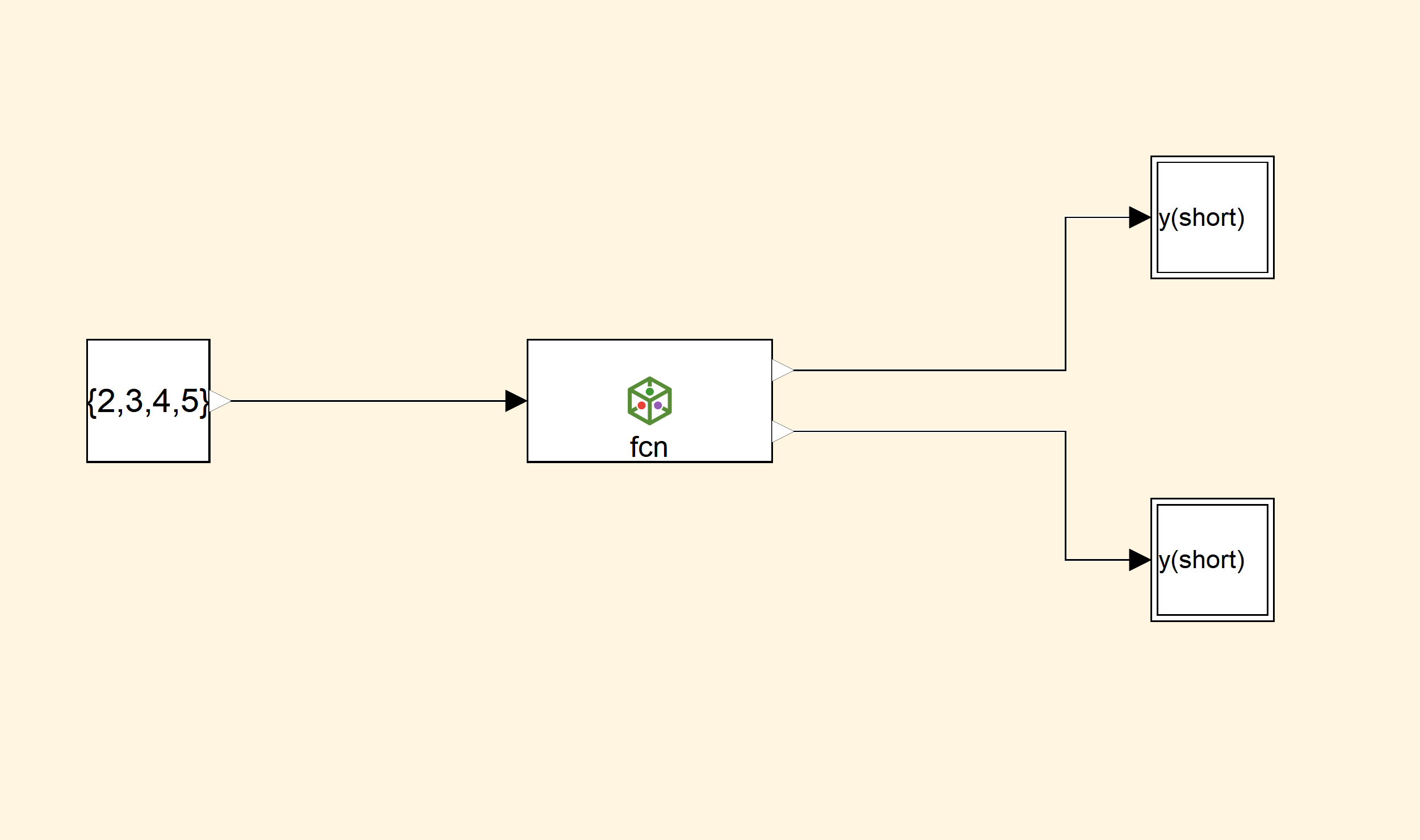
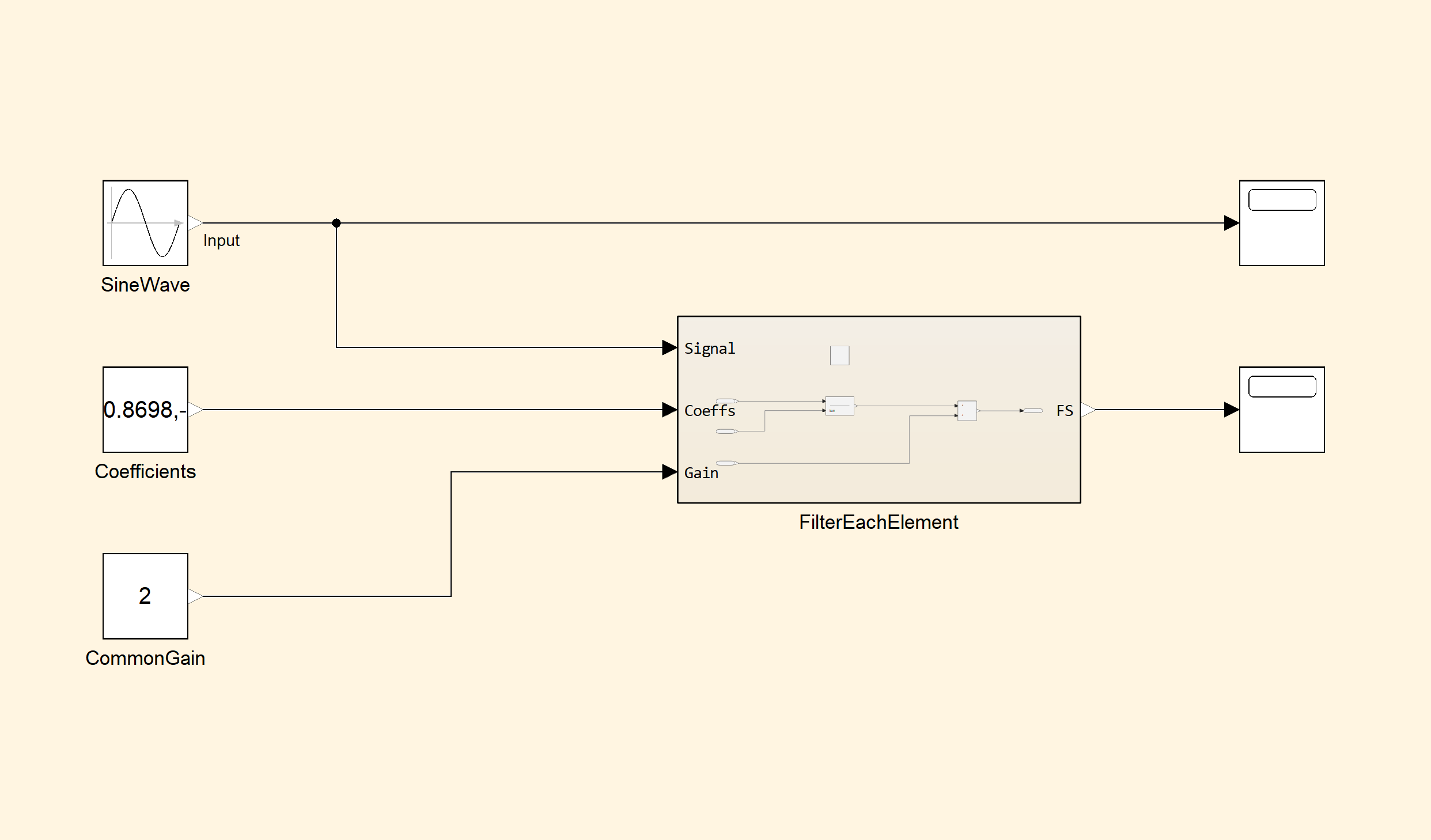
使用 JuliaFunction 模块在 Sysblock 中实现 Julia 函数
此示例从零开始搭建一个包含 JuliaFunction 模块的模型,详细介绍了如何自定义该模块来计算值矩阵的均值和标准差。
打开示例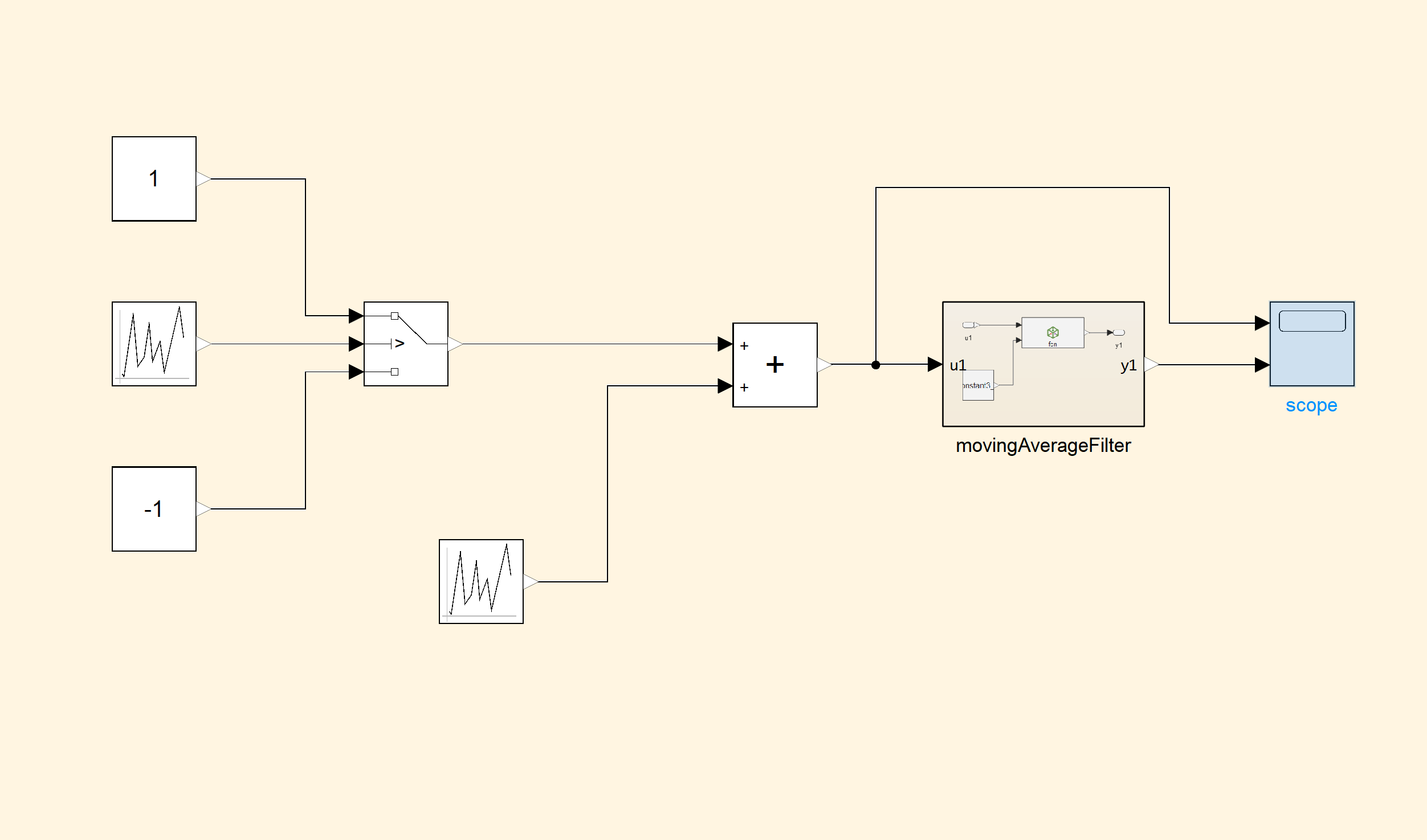
合并信号示例
此示例搭建了一个包含条件执行子系统和Merge模块的模型,详细介绍了如何通过Merge模块将两个不同时间更新的输入信号合并为单一输出,并确保任何时刻的输出值等于其驱动端最近一次计算的输出。
打开示例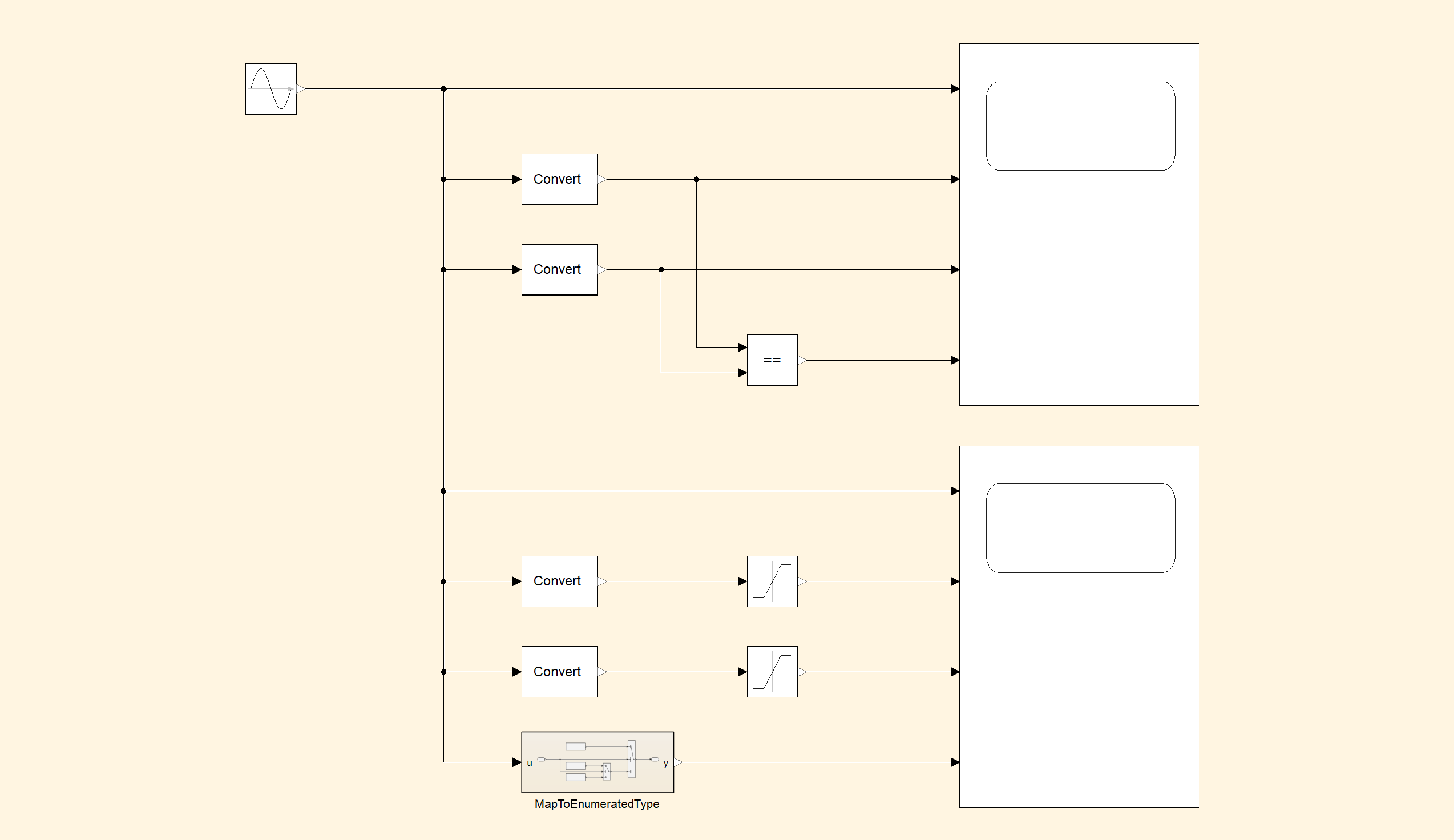
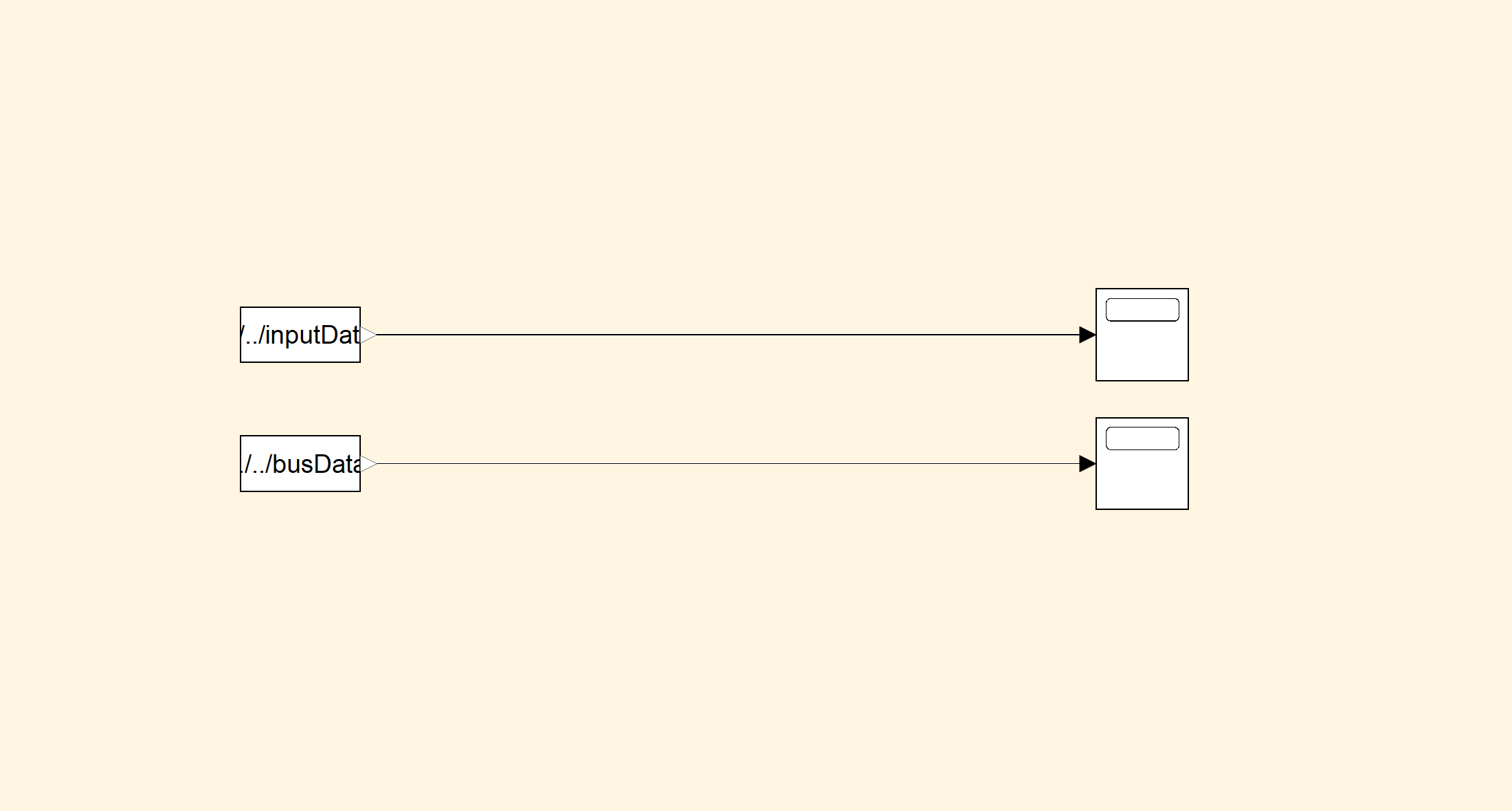
使用 FromFile 模块加载数据
此示例搭建了一个包含 FromFile 模块和多种数据加载方式的模型,详细介绍了如何通过 FromFile 模块从 CSV 文件加载不同格式的仿真输入数据,并确保数据能够正确导入到仿真系统中进行后续处理。
打开示例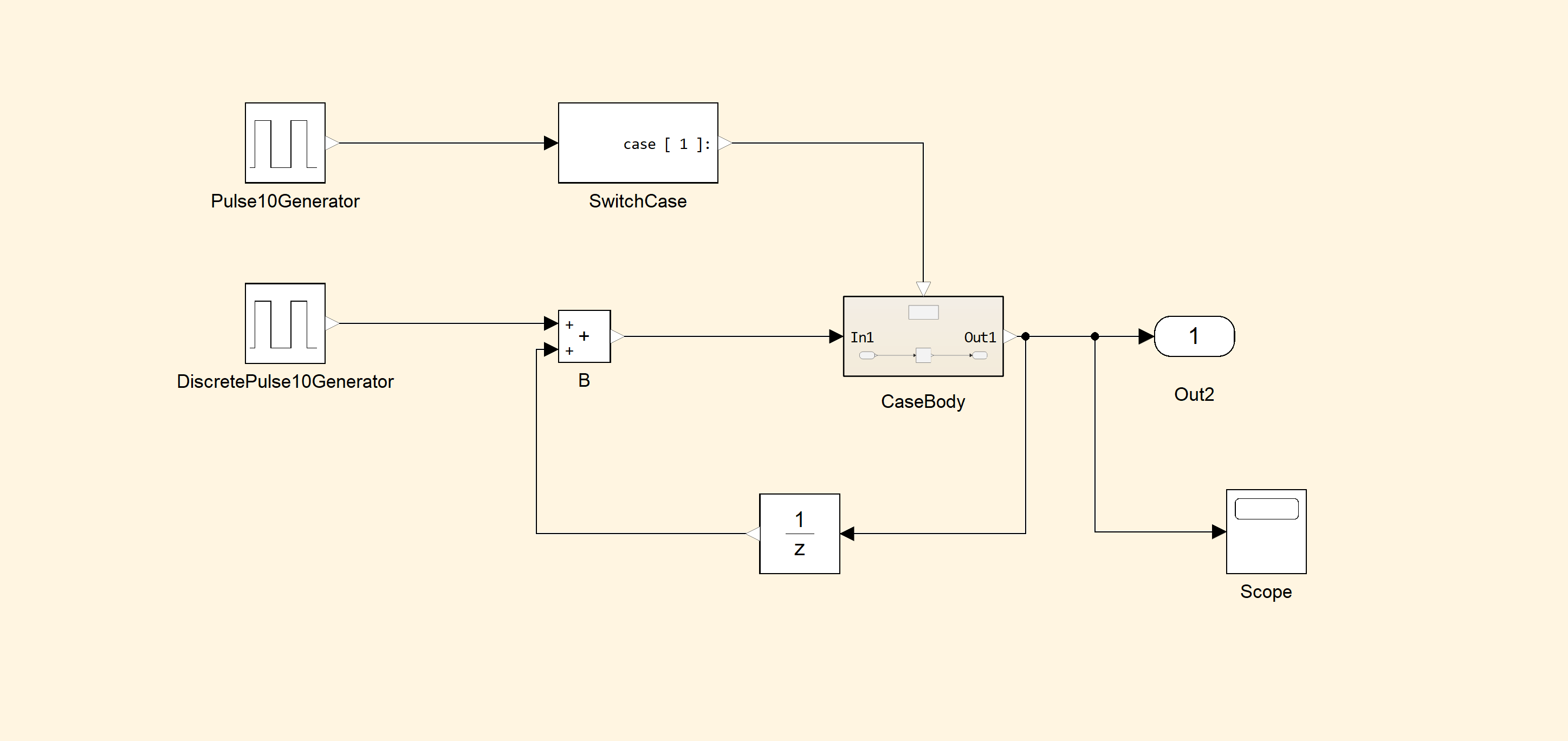
基于 If 模块与动作子系统的错误示例
此示例搭建了一个包含 If 模块与动作子系统 IfBody 的模型,详细说明在模块 B 驱动 IfBody 的前提下,执行顺序设置不当为何会导致非法执行与代数环错误,并给出通过插入 unitDelay 模块打破代数环的处理思路。
打开示例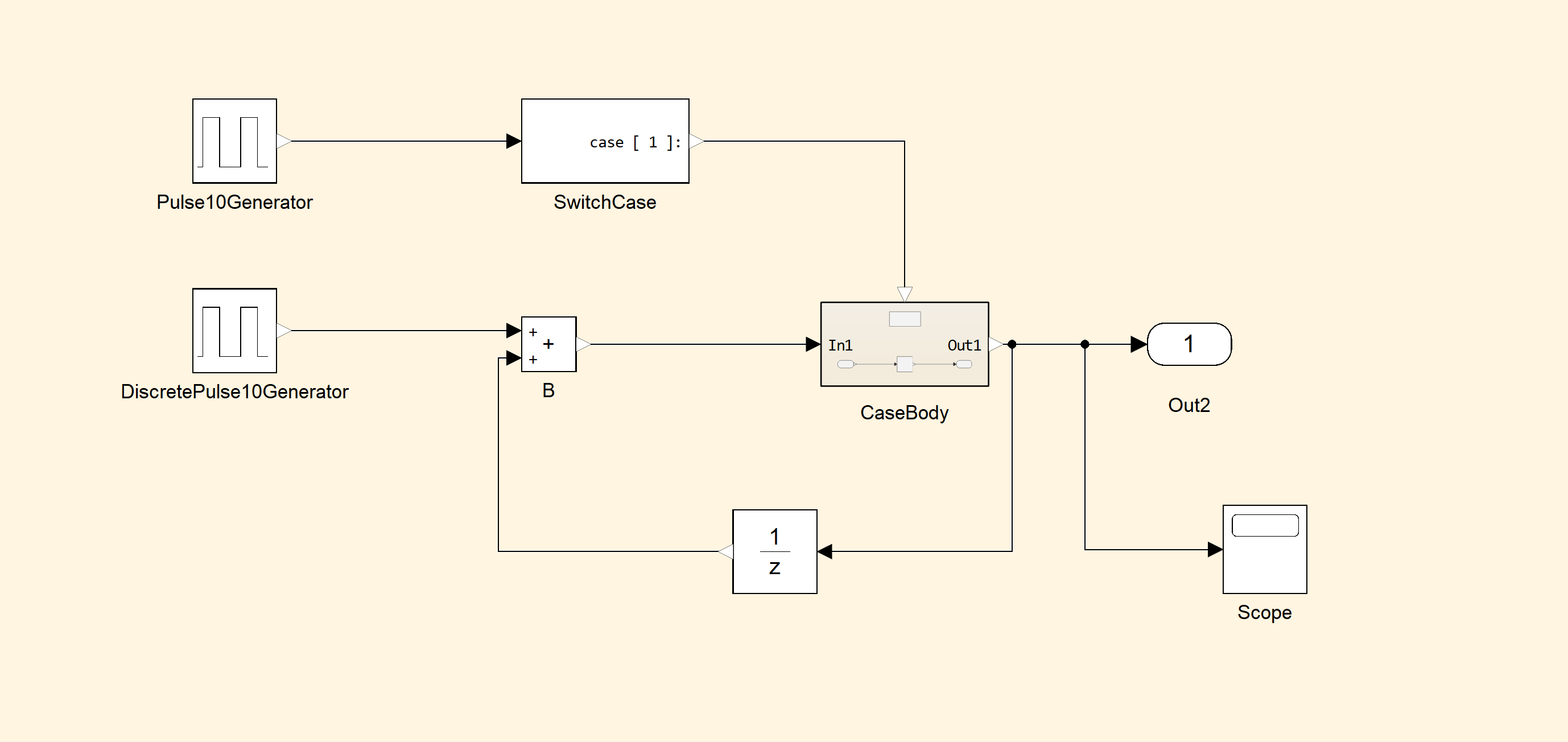
基于 switch-case 模块和动作子系统的错误示例
此示例搭建了一个包含 SwitchCase 模块与动作子系统 CaseBody 的模型,详细说明了执行顺序设置不当时为何会导致非法执行与代数环错误,并给出通过插入 unitDelay 模块打破代数环的处理思路。
打开示例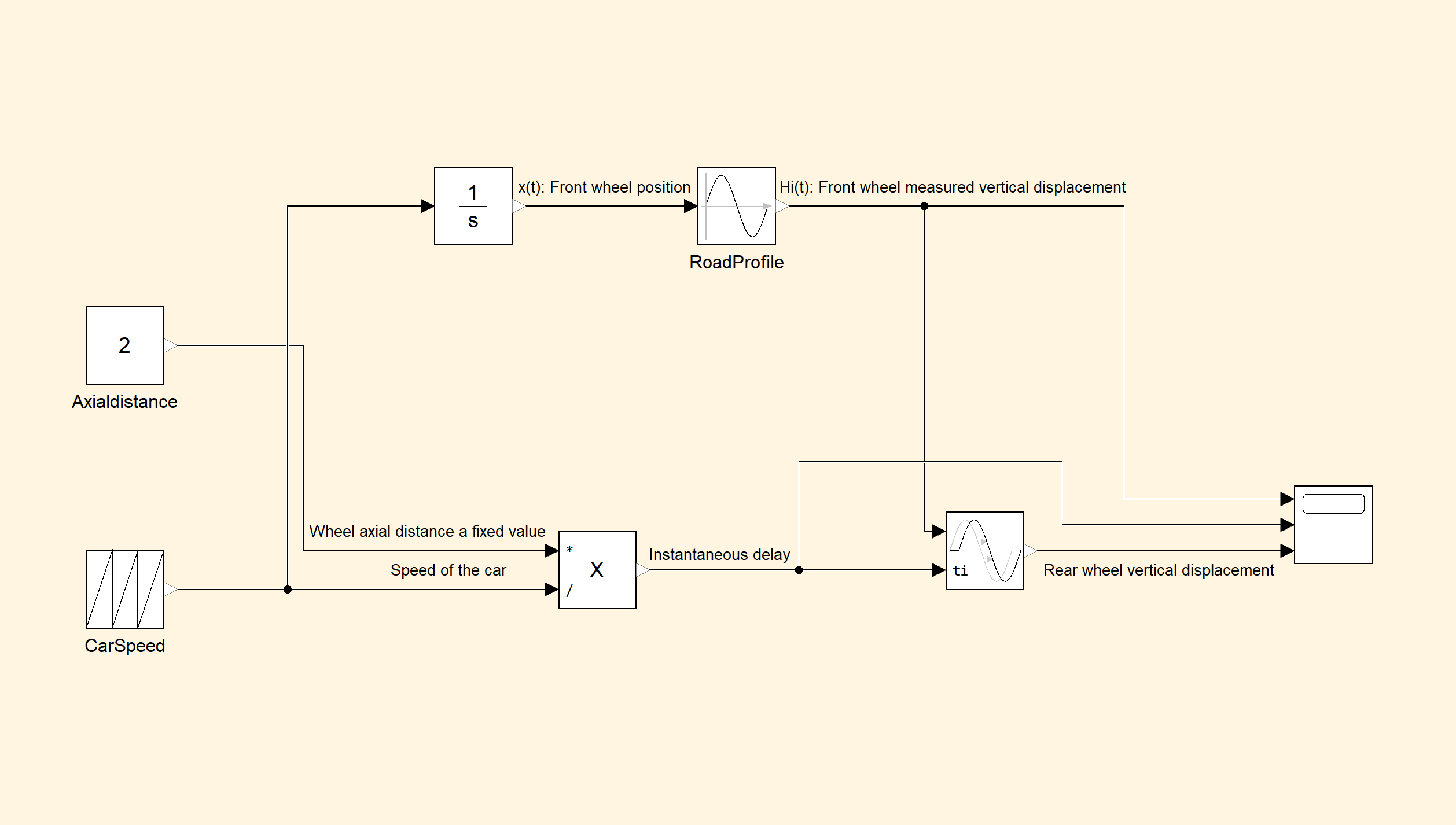
仿真具有可变传输延迟现象的系统
此示例用 VariableTransportDelay 模块演示随时间变化的输运延迟建模,包含基于车速的车轮位移和基于流速的管道温度案例,并说明延迟计算、最大延迟/初始输出/缓冲区设置及在 Scope 中比较验证的方法。
打开示例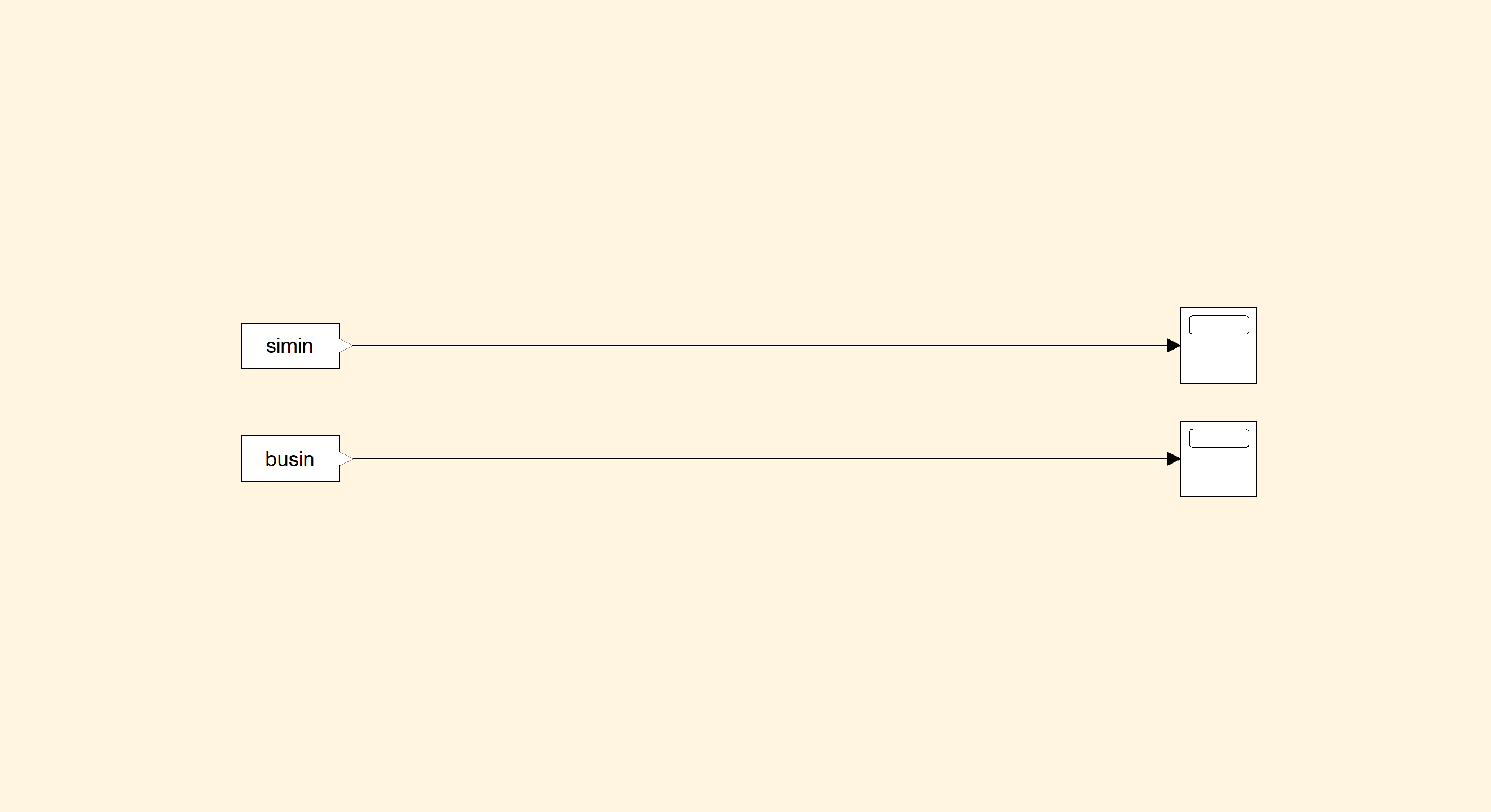
使用 FromWorkspace 模块加载数据
此示例使用 FromWorkspace 模块演示如何从工作区加载多种格式的输入数据(数组、总线、总线数组),并说明数据组织、维度设置及在 Scope 查看结果的方法。
打开示例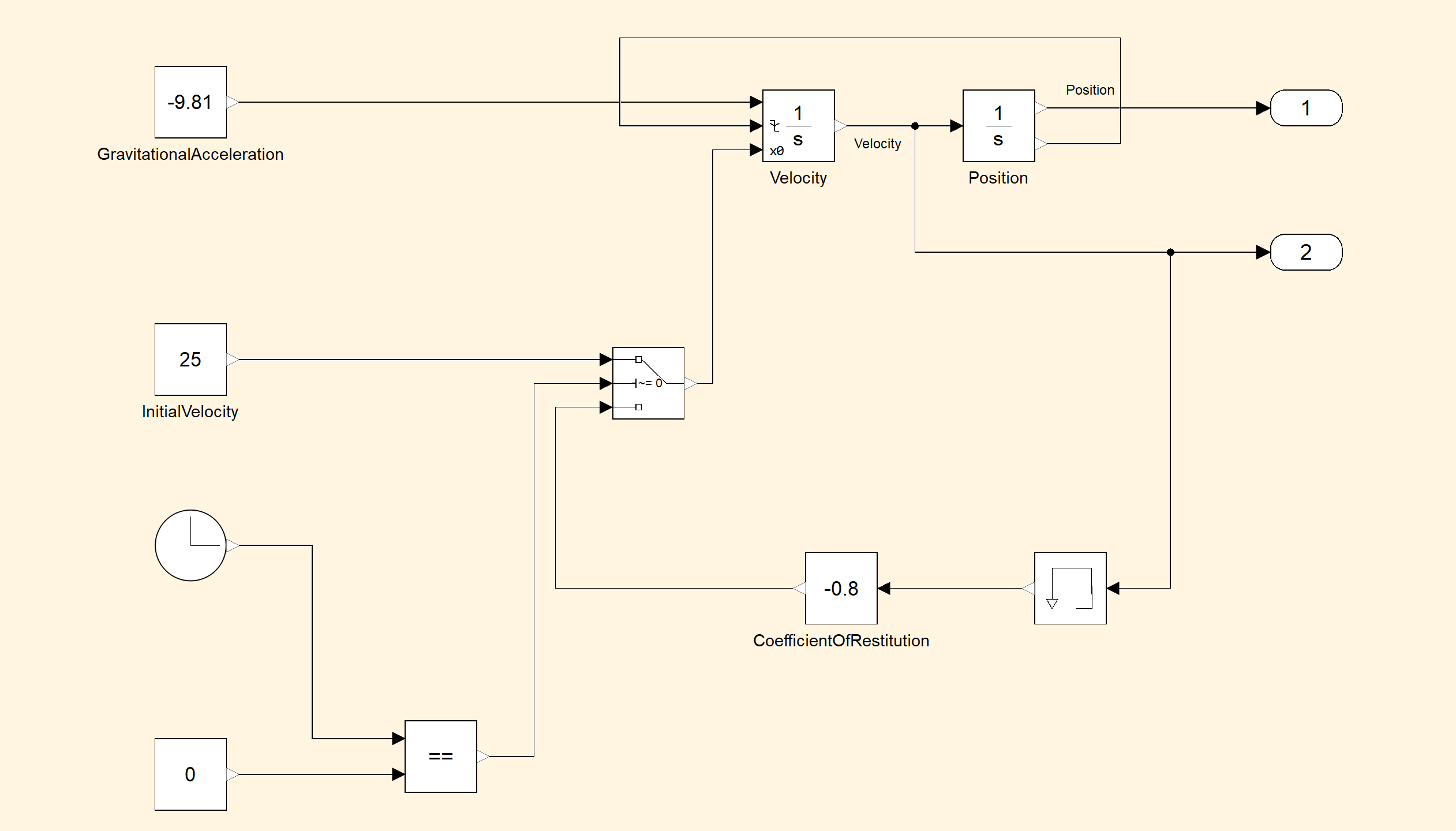
# 工程应用
提示
单击打开示例后,可能会出现图形视图显示异常的情况,原因是未加载对应的模型库。此时单击主页工具栏检查按钮,会自动加载对应的模型库,通过检查后模型会正常展示。
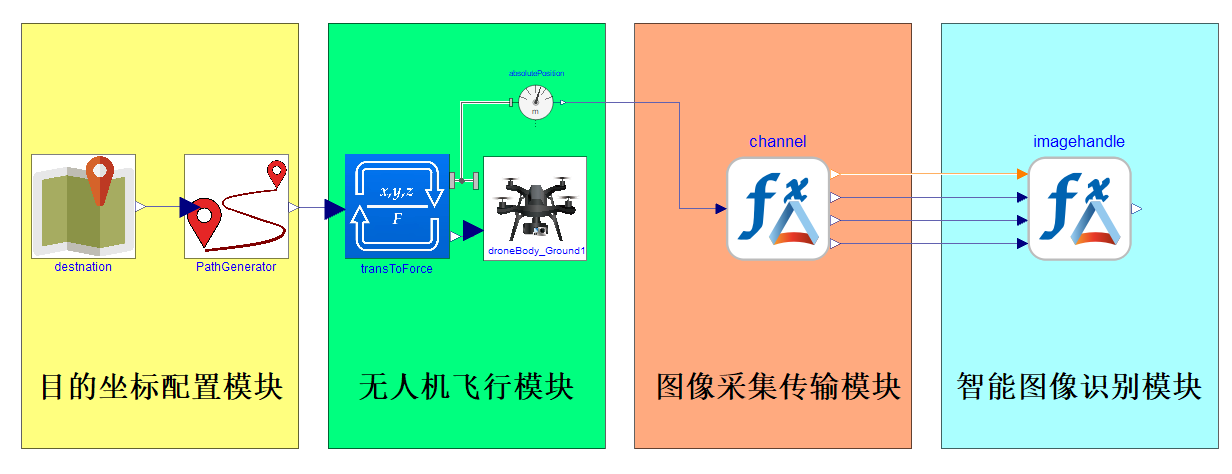
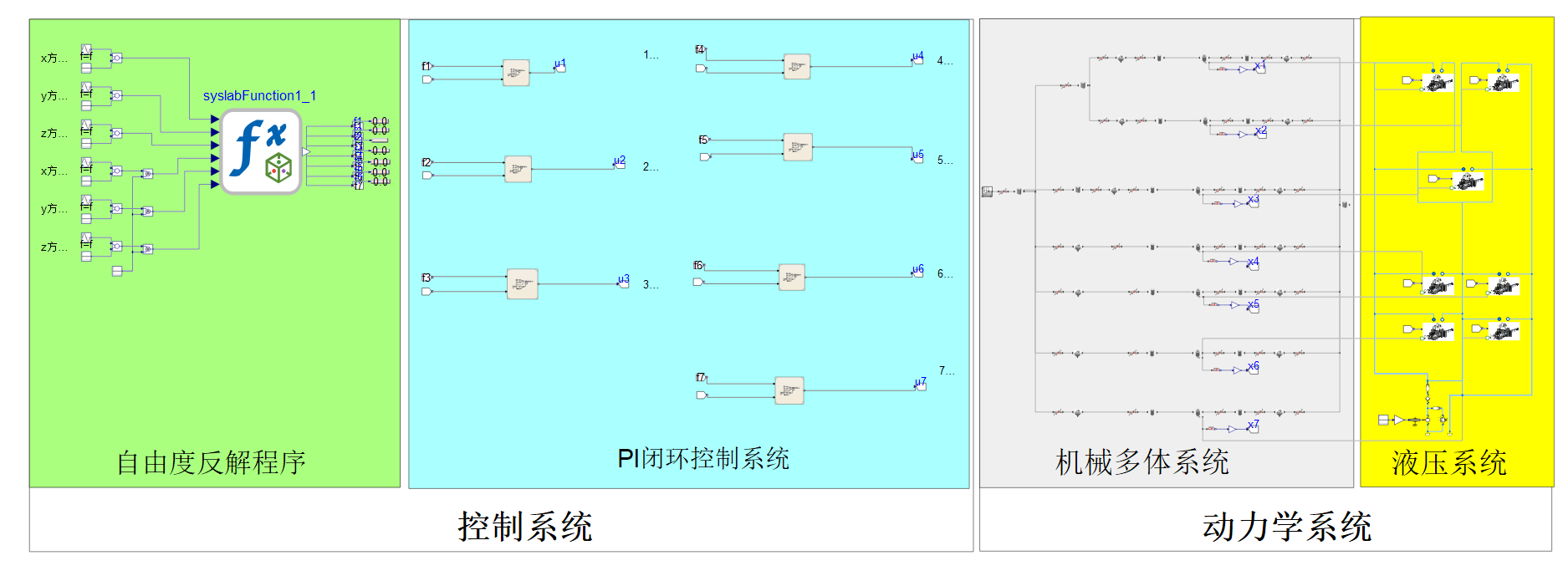
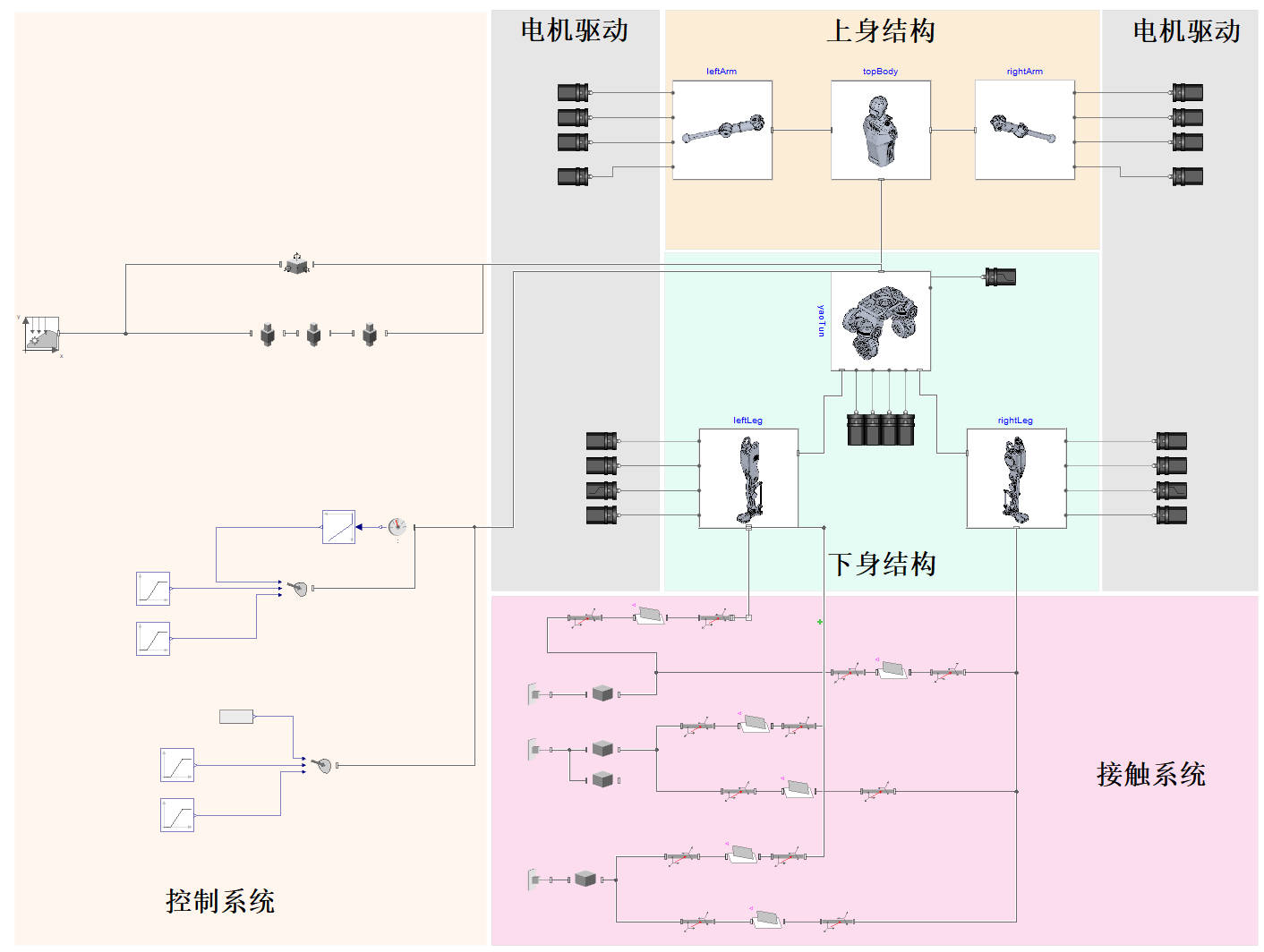
人形机器人系统
机器人的发展逐步从“功能导向的人形机器人”向“具身智能机器人”迈进,智能机器人智能化能力的增强,可以极大提升智能机器人在面对复杂任务、不同场景、实时变化的环境等方面的应用潜力。
打开示例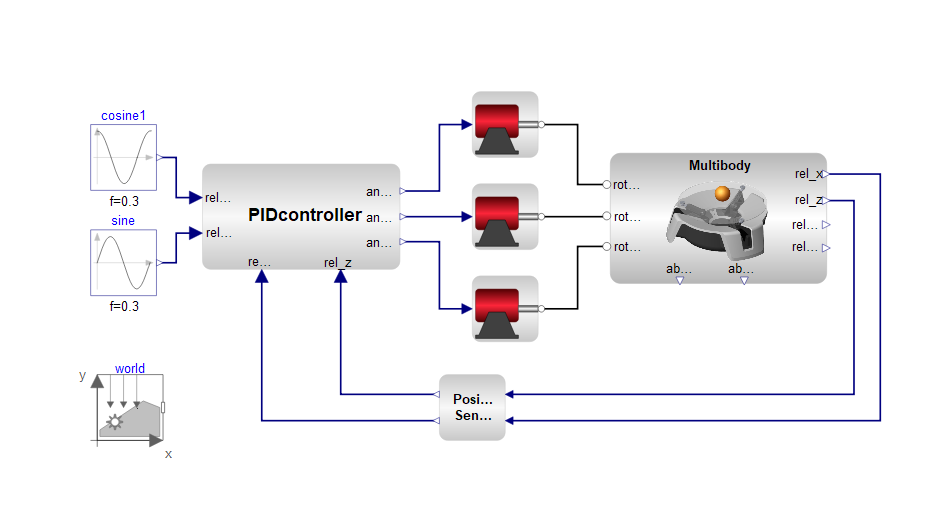
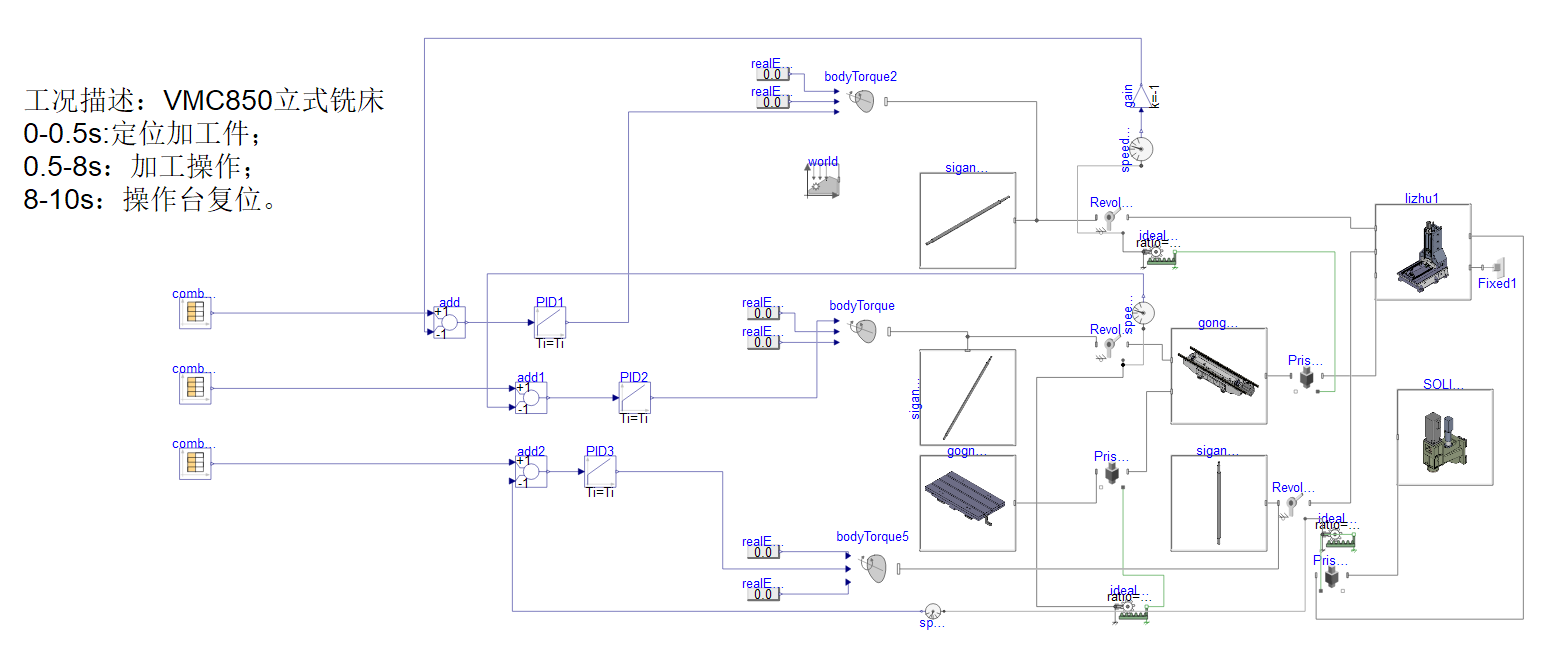
VC850 机床建模
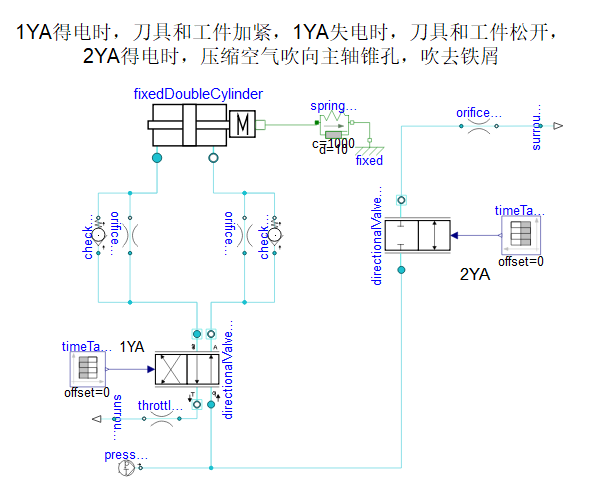
VC850 立式加工中心是一种广泛应用于机械制造领域的高精度数控机床,该机床采用三轴伺服直联控制全封闭结构,配备钢球滚动直线导轨和 A 字形跨式结构设计,具有高刚性和稳定性。
打开示例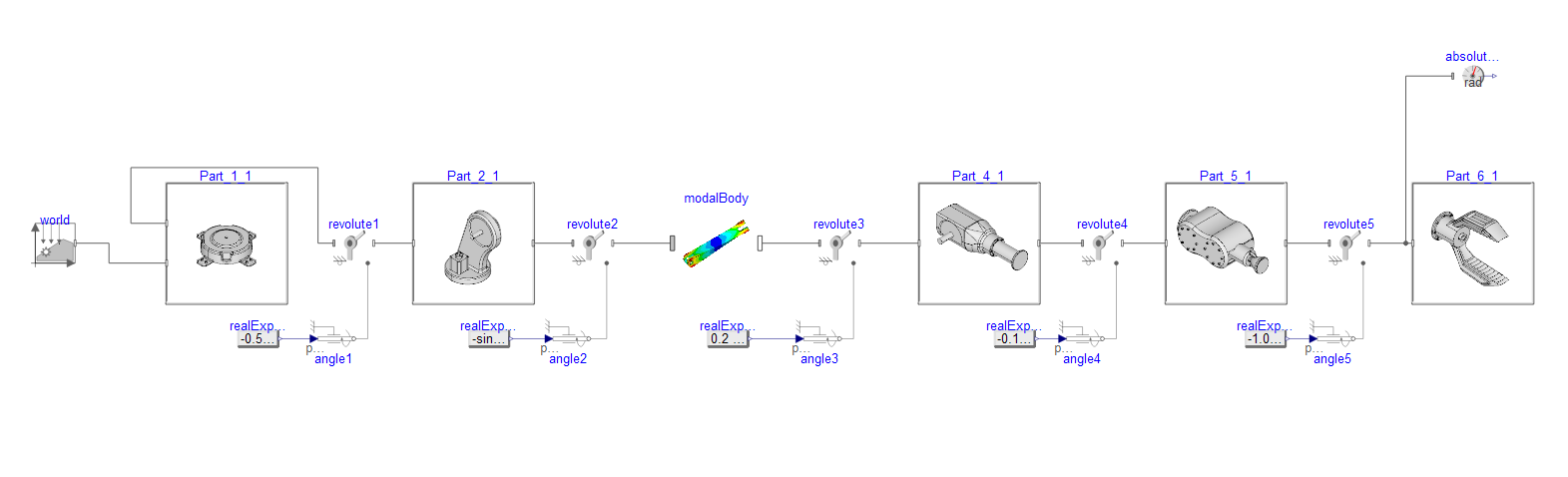
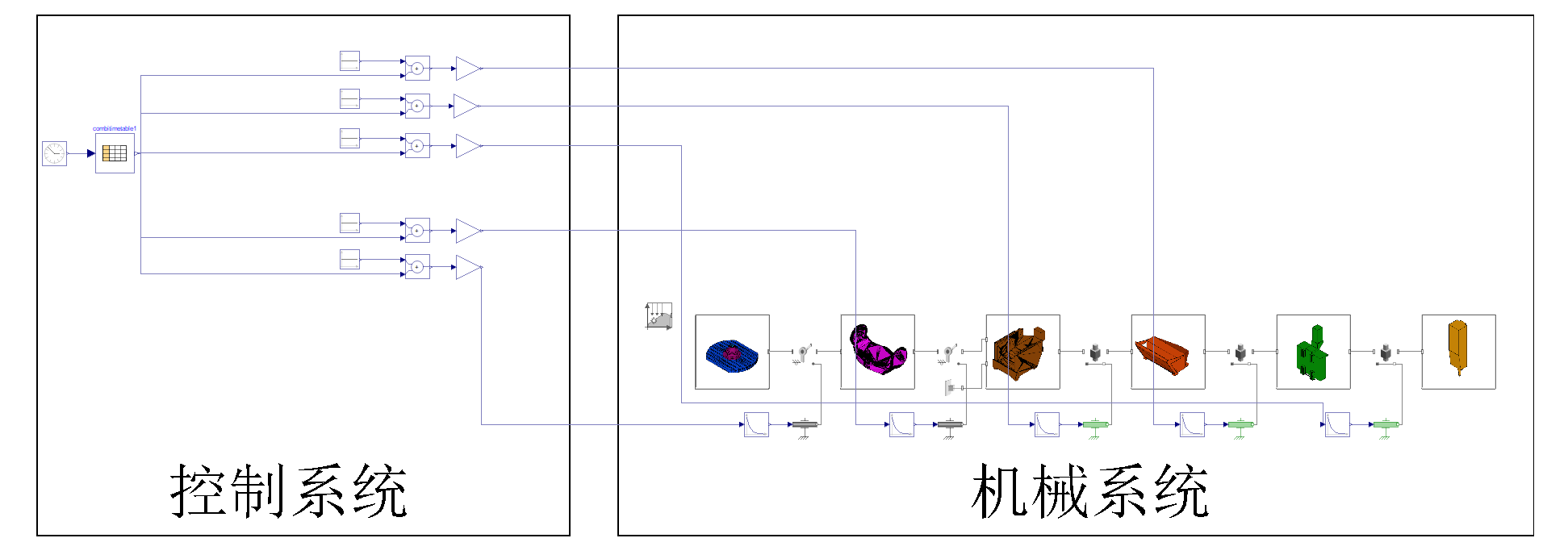
机械臂刚柔耦合建模
机械臂在汽车制造、电子组装等工业场景中需完成高精度作业(如焊接、抓取),以及在高速运动中保持末端执行器稳定性,传统刚性模型无法准确模拟柔性部件的动态变形,需要引入柔性体模型,以模型描述机械臂的刚柔耦合运动。
打开示例
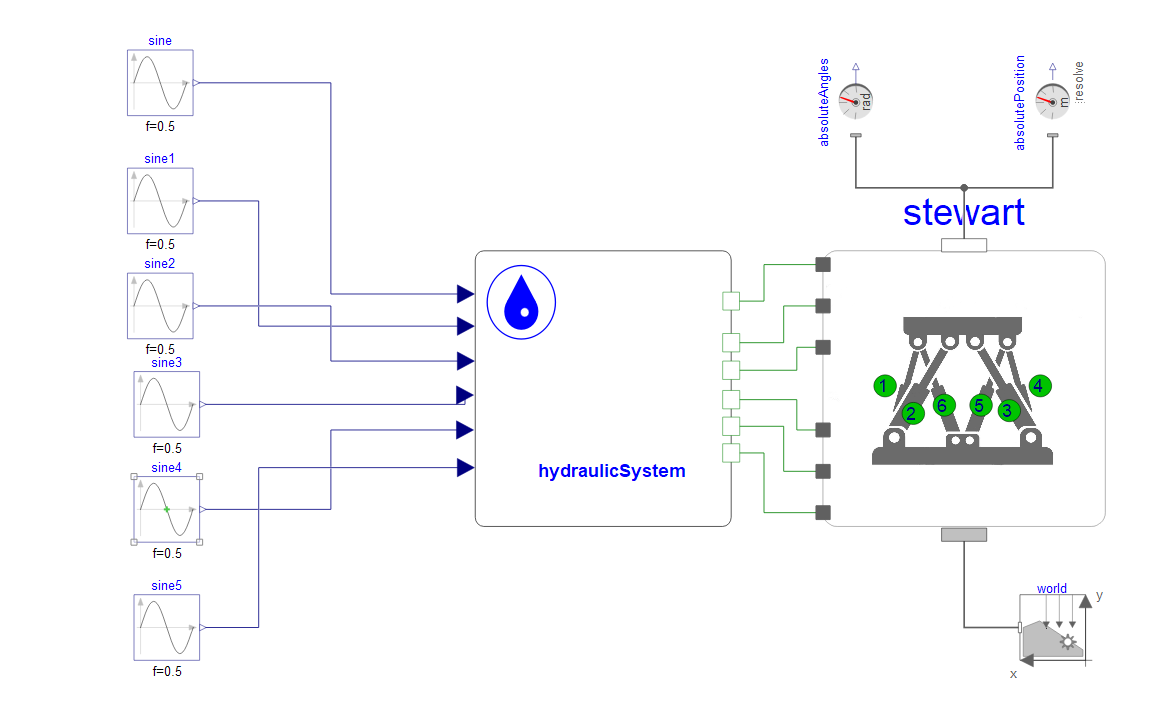
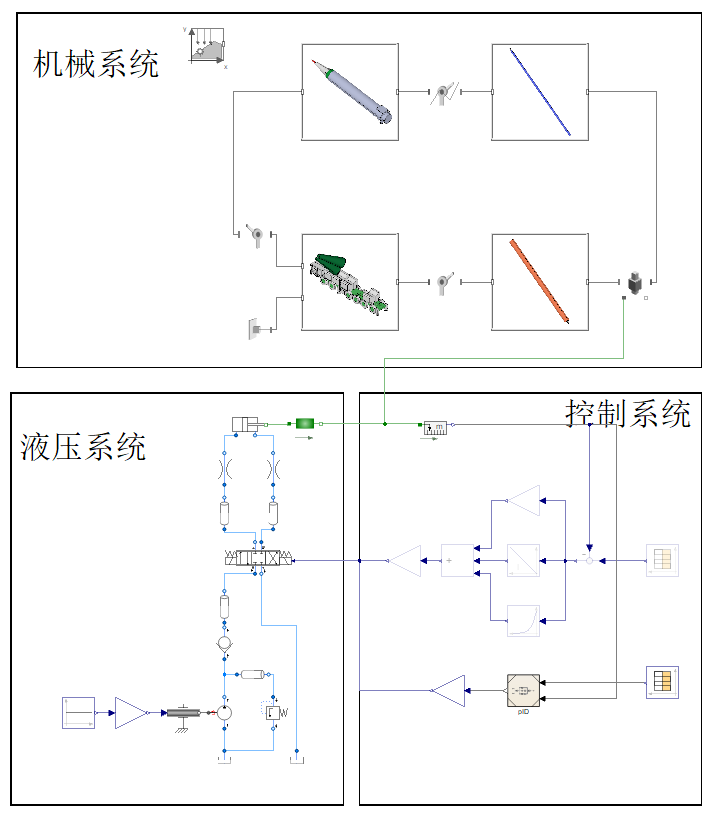
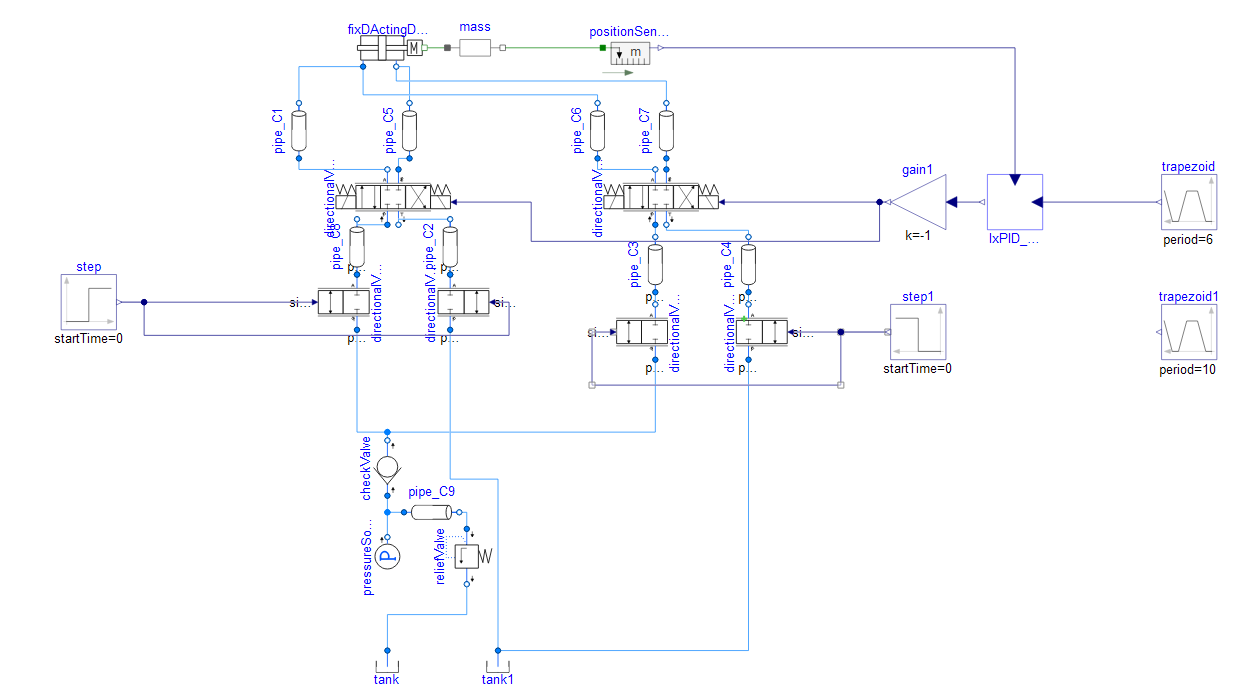
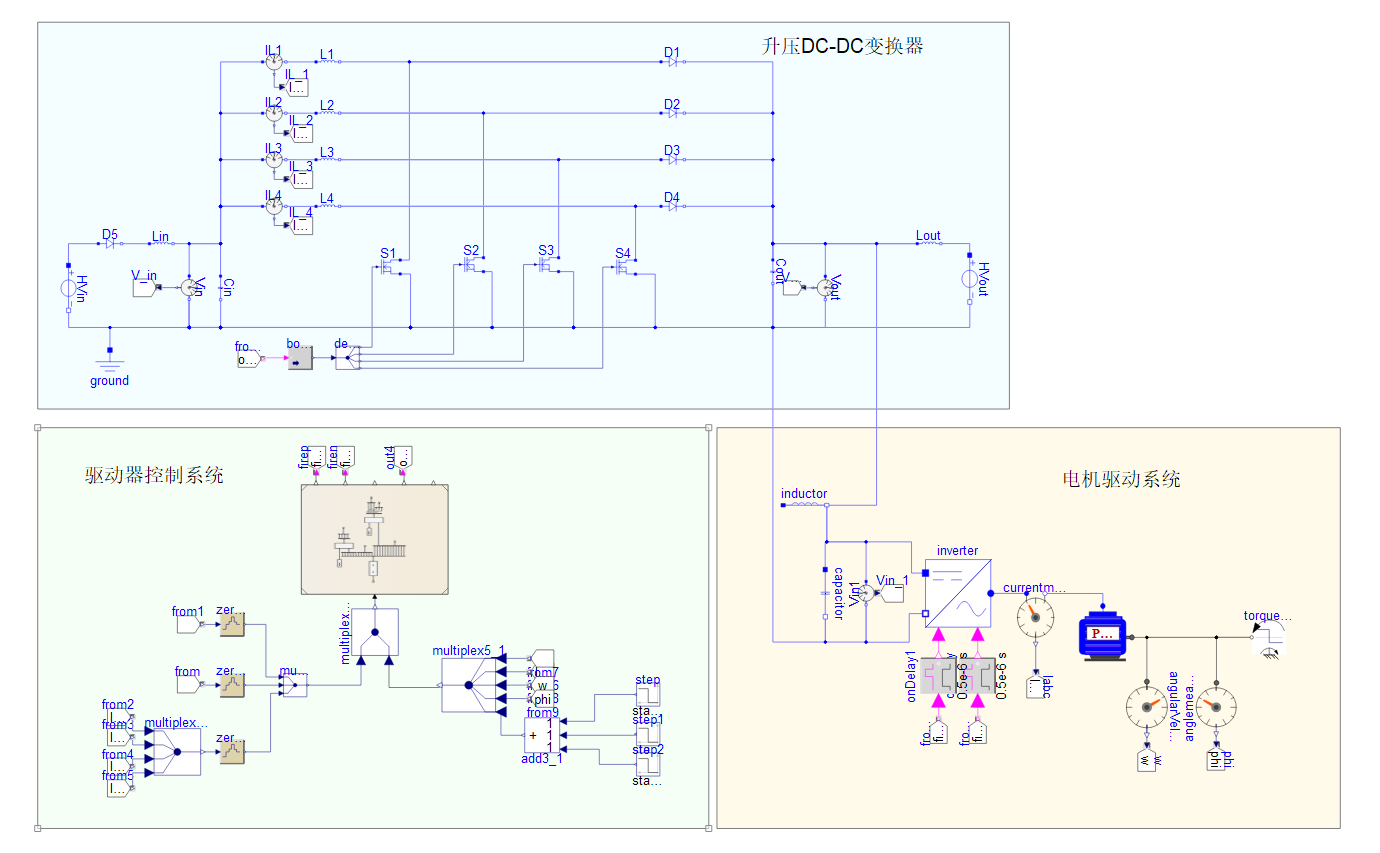
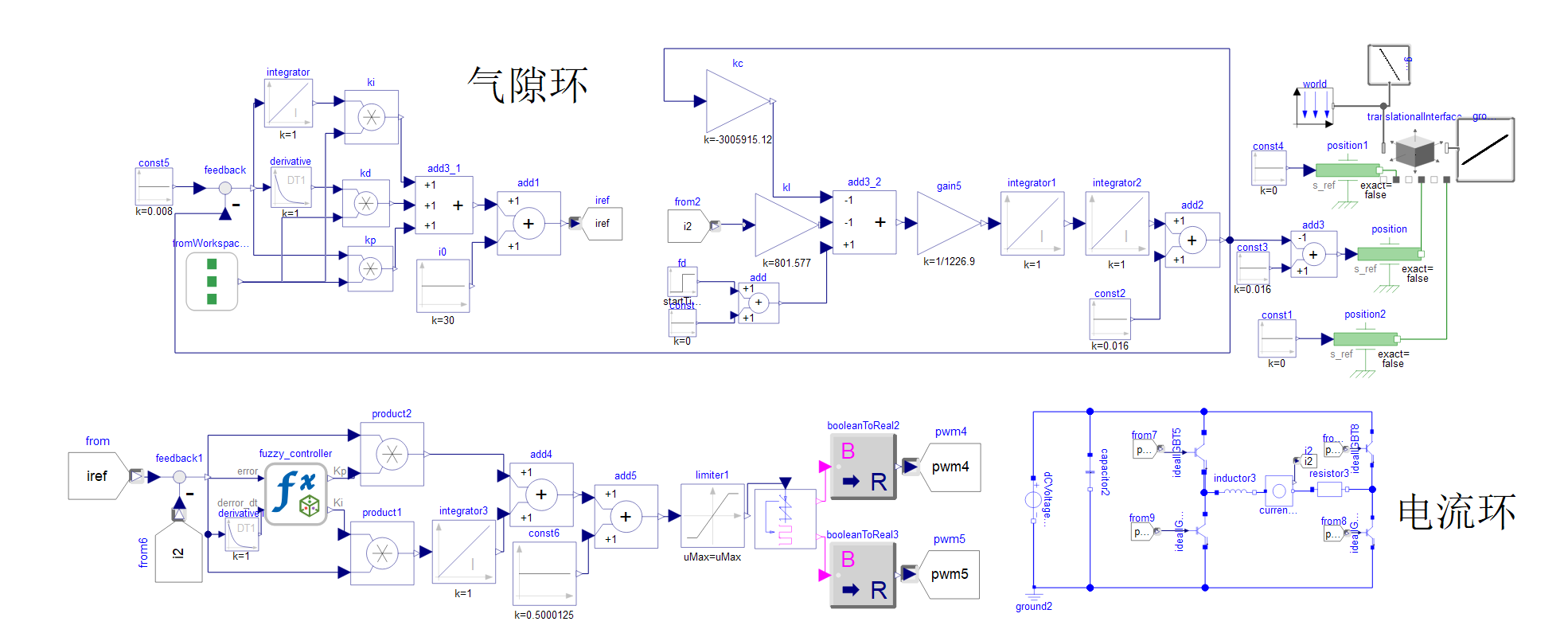
六自由度平台液压驱动轨迹规划
六自由度平台通过六条电/液压作动器实现X/Y/Z平移与滚转/俯仰/偏航姿态控制,具备高精度动态模拟、运动再现、振动试验、虚拟样机验证、驾驶/飞行仿真与硬件在环测试等功能。
打开示例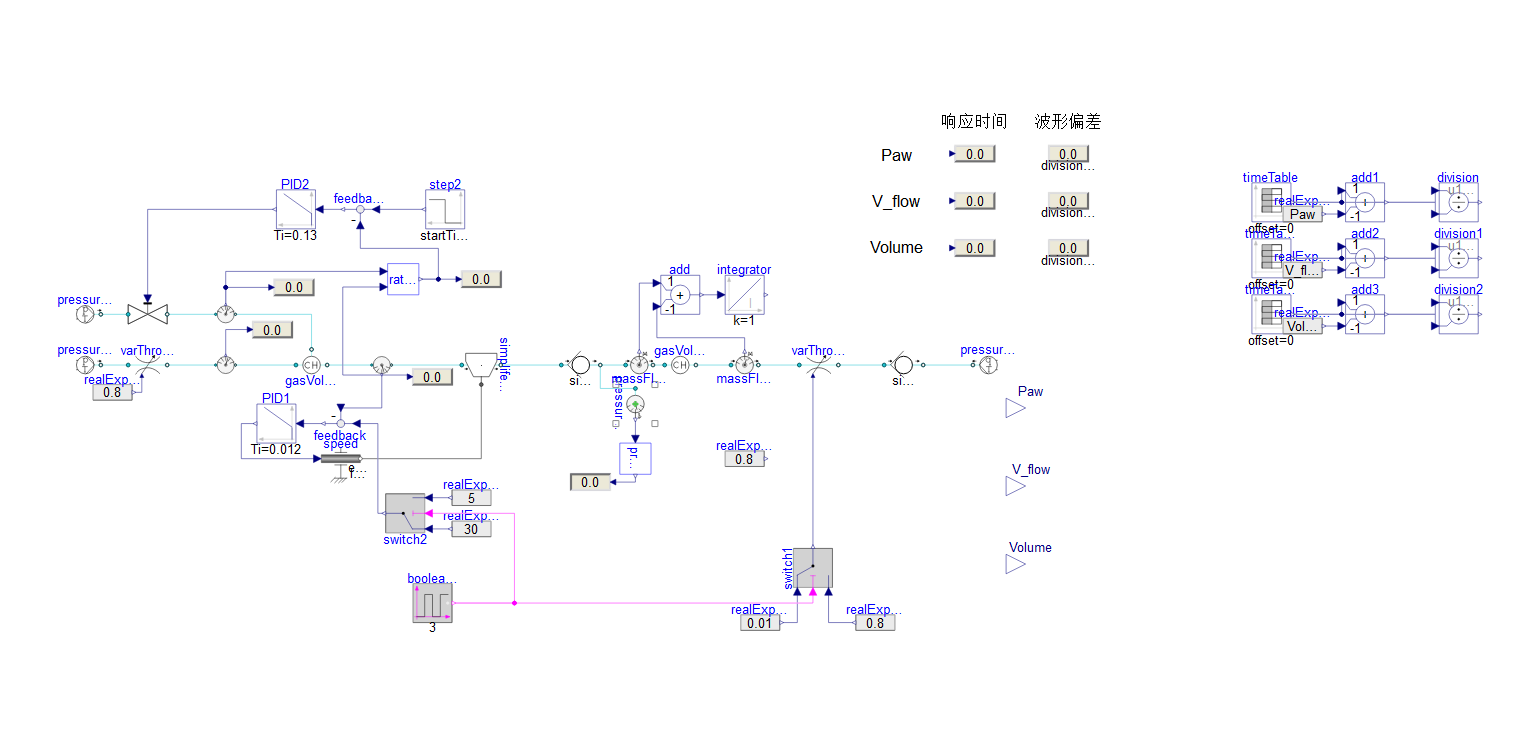
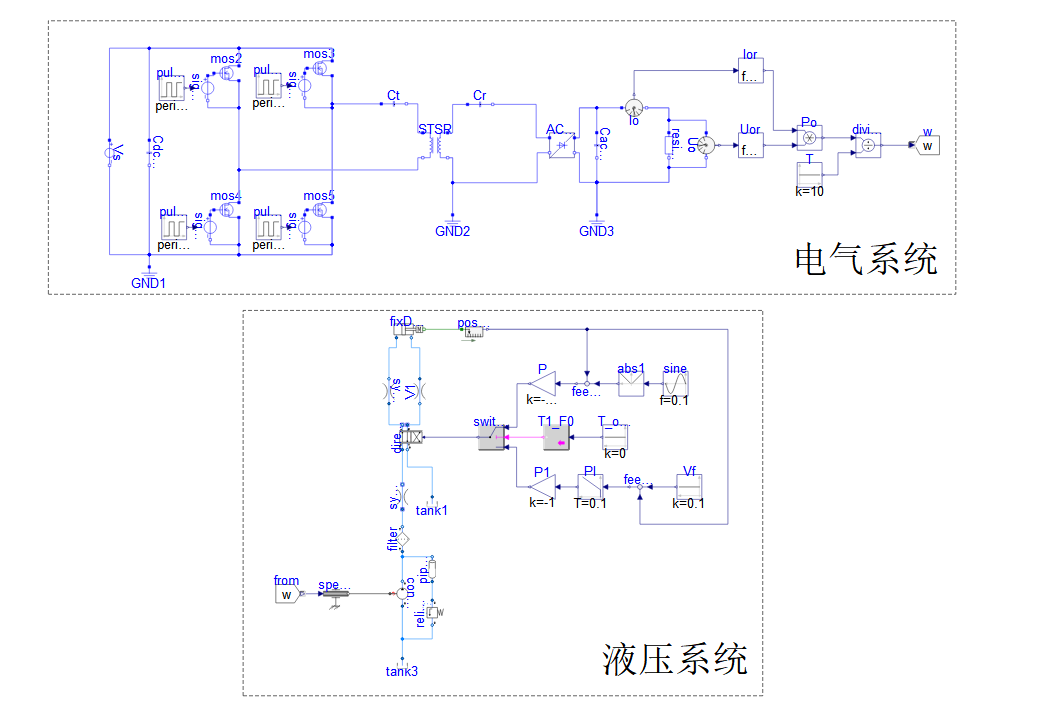
医用呼吸机系统
医用呼吸机系统为一种通过机械通气来辅助或代替患者的自主呼吸功能,模拟人体的呼吸,利用机械驱动产生正压,将含氧量较高的气体压入患者肺内,帮助患者完成吸气动作,在呼气时通过控制呼气回路打开,使患者完成呼气动作。
打开示例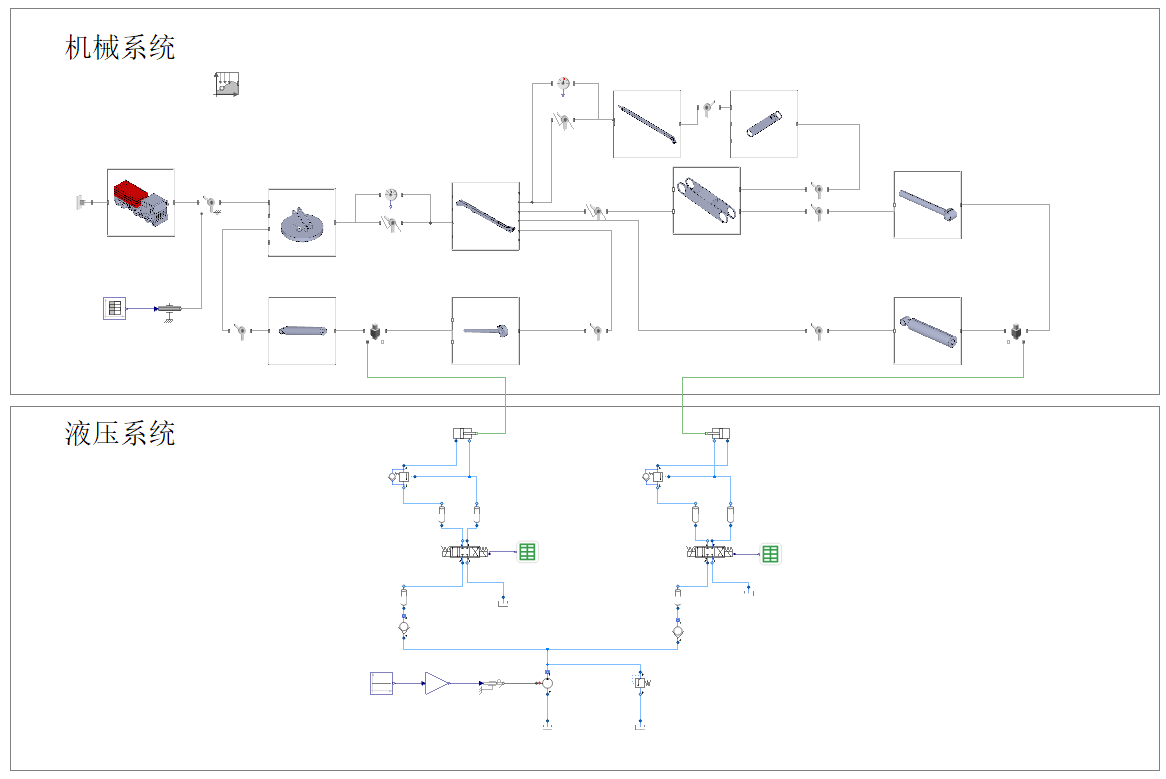
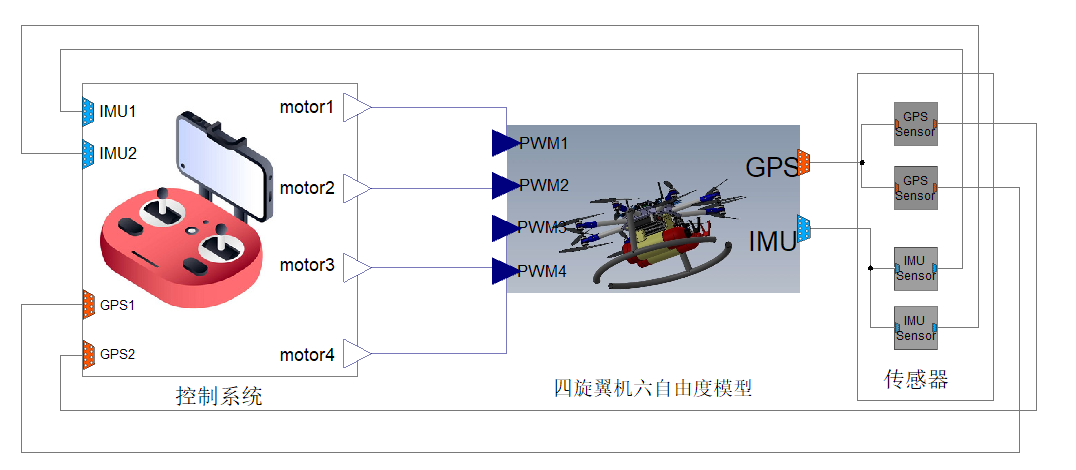
飞行器数字化供配电系统
飞行器通常由机体、动力系统、控制系统、航电系统、起落架等部分组成;供配电系统作为航电系统的一部分,负责为飞行器的所有电子设备提供电力支持,保障飞行器各系统的正常运行。
打开示例
# 工具箱使用
脚本化建模
展示了如何使用 Sysplorer API 搭建模型,并进行仿真、查看结果
物理模型参数扫描
展示了如何使用 Sysplorer API 实现物理模型参数扫描
Sysblock 模型参数扫描
展示了如何使用 Sysplorer API 实现 Sysblock 模型参数扫描