# 反馈回路与闭环控制
反馈回路与闭环控制是系统动态行为分析和设计的核心概念,广泛应用于自动控制、信号处理、通信等领域,能够显著提高系统的稳定性、鲁棒性和响应速度。
参考模型示例
,。本章节将详细介绍反馈回路和闭环控制的基本概念、工作原理及其在框图建模中的实现方式。
# 基本概念
# 反馈回路
反馈回路(Feedback Loop) 是指系统输出的一部分信号返回到输入端,以影响系统的输出或行为。
反馈回路通过将输出信息反馈给输入端,形成闭环控制,有助于调节系统的行为,确保系统按照预期的目标运行。
反馈回路主要分为以下两种类型:
负反馈(Negative Feedback)
- 当系统输出的信号反向反馈到输入端时,这种反馈称为负反馈。
- 负反馈有助于减少误差,增强系统的稳定性,并抑制扰动或噪声。
正反馈(Positive Feedback)
- 当系统输出的信号与输入信号相同方向反馈时,这种反馈称为正反馈。
- 正反馈通常用于放大系统响应,但如果使用不当,也可能导致系统不稳定。
# 作用
| 作用 | 说明 |
|---|---|
| 误差修正 | 通过比较系统输出与期望输出之间的差异,反馈回路可以自动调整系统输入,以减少或消除误差。 |
| 稳定性增强 | 负反馈通常用于增强系统稳定性,防止输出过度或振荡。 |
| 系统性能优化 | 反馈回路能够优化系统性能,提高精度和鲁棒性,尤其是在外部扰动和不确定性存在的情况下。 |
# 闭环控制
闭环控制(Closed-Loop Control) 是指系统中存在反馈回路,系统输出的部分信号被反馈到输入端,形成一个闭环。
闭环控制系统通过反馈来自动调整期望行为,确保系统达到期望的目标,并对扰动和变化作出响应。

# 基本组成部分
控制器
- 控制器是闭环系统中的核心模块,负责根据误差信号调整系统输入。
- 常见的控制器包括比例(P)、积分(I)、微分(D)控制器,及其组合(如 PID 控制器)。
被控对象
被控对象是系统的主要部分,通常是需要控制的物理过程或设备,例如温度、速度、位置等。
传感器
传感器用于测量系统输出,并将其转换为可处理的信号反馈到控制器。
反馈回路
反馈回路将输出信号反馈到输入端,反馈信号与期望输出的差异(即误差信号)被传送给控制器。
误差信号
误差信号是期望输出与实际输出之间的差异,它是控制器调整输入的依据。
# 工作原理
控制器根据期望输出(设定值)与实际输出(反馈信号)之间的差异(即误差信号)进行计算。
控制器产生调整信号,驱动被控对象进行相应的动作或调整。
被控对象执行调整,改变系统输出,输出信号通过传感器反馈给控制器。
系统不断进行调整,直到误差降到最小,输出达到期望目标。
# 作用
| 作用 | 说明 |
|---|---|
| 自动调节 | 闭环控制系统能够根据实际情况自动调节,适应系统变化和外部扰动。 |
| 稳定性和精度 | 通过反馈回路,闭环控制能够确保系统稳定性,并提高输出精度。 |
| 鲁棒性 | 闭环控制能够有效抑制噪声、干扰和不确定性,增强系统的鲁棒性。 |
# 负反馈与正反馈
反馈类型的选择对系统性能至关重要,负反馈和正反馈分别适用于不同的应用场景。
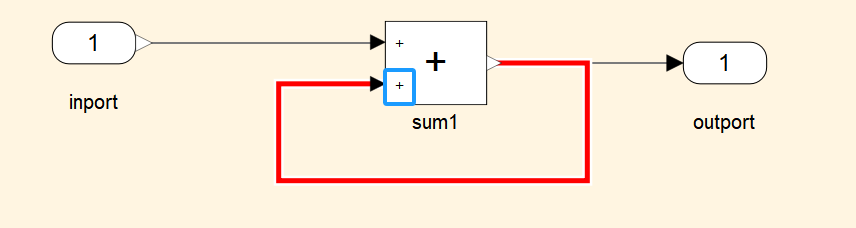
# 负反馈
负反馈是反馈信号与输入信号方向相反的情况。当系统输出信号反向反馈到输入端时,控制系统通过减少误差来稳定输出。
负反馈的主要优点是增强稳定性,减小灵敏度,并在面对外部扰动时能够自动调节系统行为。它广泛应用于大多数控制系统中。
# 作用
| 作用 | 说明 |
|---|---|
| 减少系统偏差 | 通过不断调整,负反馈减少系统输出与期望值之间的误差。 |
| 增强系统稳定性 | 防止系统因过度响应而导致的不稳定或振荡。 |
| 改善系统性能 | 降低系统的过渡响应时间,提高精度。 |
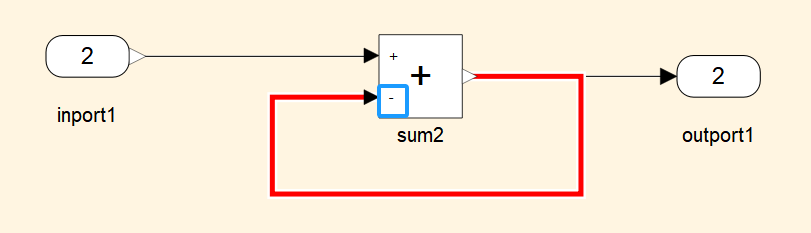
# 正反馈
- 正反馈是反馈信号与输入信号方向相同的情况。当系统输出信号与输入信号同向反馈时,系统的响应会被放大,可能导致系统输出的加速增加。
# 作用
| 作用 | 说明 |
|---|---|
| 增强响应 | 正反馈可以加速系统响应,通常用于需要放大信号的系统中。 |
| 可能导致不稳定 | 如果使用不当,正反馈可能会导致系统的失控或振荡。 |
上述正负反馈的基于Sum模块的框图表示,仅作概念解析,无实际意义。
# 框图建模中的反馈回路
在框图建模中,反馈回路通常通过连接模块的输出和输入端口来实现。设计人员通过反馈回路来控制系统的动态行为,确保系统的稳定性和精度。
# 框图表示
反馈回路在框图中通常由一个闭环结构表示,输出信号通过反馈路径返回输入端,并与期望值进行比较。误差信号被用作控制器的输入,控制器根据误差计算出调整信号,并驱动被控对象进行相应的调整。
在框图中,反馈回路一般包括以下模块:
参考信号(设定值):系统期望的输出值。
误差计算模块:将参考信号与系统输出信号进行比较,计算误差。
控制器:根据误差信号调整输入。
被控对象:系统的实际执行部分,根据控制信号进行调整。
传感器和反馈路径:将输出信号反馈到误差计算模块,完成闭环控制。
# 设计要点
| 设计要点 | 注意事项 |
|---|---|
| 稳定性分析 | 设计时需要进行稳定性分析,确保闭环系统在反馈后不会引发不稳定或振荡。 |
| 带宽与增益调节 | 合理调节反馈回路的带宽和增益,以确保系统响应速度和精度。 |
| 反馈信号的滤波 | 避免噪声或不必要的高频成分影响反馈信号的准确性。 |
# 示例模型
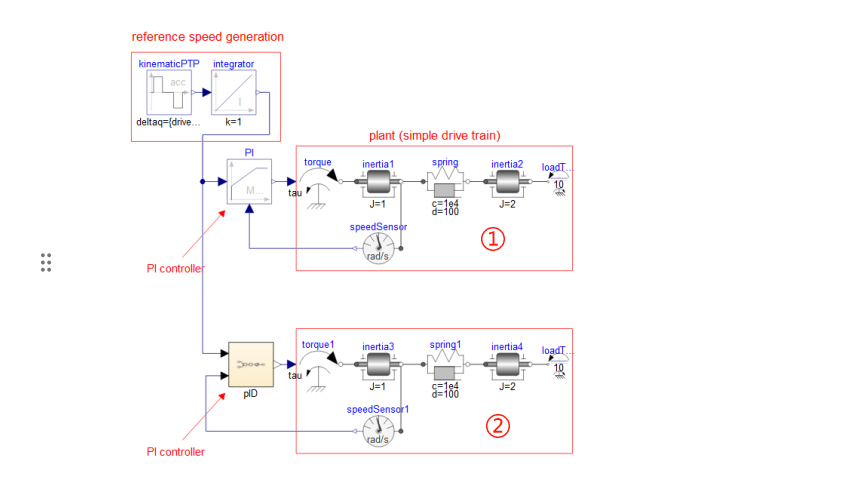
这个 pid 控制模块向我们提供了一个连接模块的输出和输入端口的反馈回路的框图示例,在该实例中,系统在输出端通过速度传感器监测实际速度,并将此反馈信息输入到 PI 控制器中,形成闭环控制。控制器比较参考速度与实际速度,计算出误差,并基于这个误差生成控制信号,来进一步调节输入。
在该示例模块中,主要使用的反馈机制是负反馈,来源于重新进入PID控制器的输出。负反馈通过将实际输出与目标值相比较,以降低实际输出与目标值之间的偏差。确保系统的输出逐步调整以接近参考输入。
假如将这个示例模块与基本组成部分逐一对应:
- 图中的 PI controller 即为基本组成部分中的控制器,
- 图中红框部分为即为模块的被控对象,
- SpeedSensor/SpeedSensor1 作为两个被控对象的传感器输出当前速度,
- 反馈回路为 PI 控制器-被控对象-速度传感器-PI 控制器,将输出的实际速度回传到 PI 控制器,
- 误差信号即为传入控制器的目标值与传感器传入控制器的实际值的差异,控制器以此来调整接下来的输出。
这 5 个部分共同组成了一个完整的反馈回路。