# 连续时间与离散时间建模
离散时间建模和连续时间建模是两种常见的建模方式,它们分别适用于不同的系统类型和需求。
参考模型示例
,。了解这两种建模方法的特点、应用场景以及它们的差异,能够帮助工程师选择合适的建模方式,并对系统进行有效地分析和优化。
# 概念
# 连续时间建模
连续时间建模(Continuous-Time Modeling)是基于连续时间信号进行建模的方式。在这种建模方法中,信号和系统的状态在任何时刻都被描述为一个连续的函数。
连续时间系统的输入、输出和状态变量都是连续变化的,这种建模方法适用于描述物理系统、模拟电路、控制系统等。
# 基本特点
- 信号连续性:系统的输入和输出信号在时间上是连续变化的,可以表示为任何时间点的瞬时值。
- 状态变量:系统的状态变量是连续的,通常用微分方程来描述系统的动态行为。
- 数学表示:连续时间系统的行为通常是通过微分方程(如线性微分方程)或状态空间方程进行描述。
# 应用场景
- 经典控制系统(如 PID 控制)
- 物理系统(如机械、热力学、液压等)
- 电气工程中的模拟电路
- 持续时间过程控制(如化学反应器控制)
# 优缺点
优点
- 精确描述物理过程的连续变化。
- 可以使用经典控制理论(如拉普拉斯变换)进行分析和设计。
缺点
- 在数字计算机上模拟时需要离散化,计算复杂度较高。
- 对于实际系统,模拟可能受到实时采样和量化误差的影响。
# 离散时间建模
离散时间建模(Discrete-Time Modeling)是基于离散时间信号进行建模的方式。在离散时间系统中,信号只在特定的时间点上取样并进行处理,时间和信号的变化都是分段的。
离散时间建模广泛应用于数字信号处理、数字控制系统、数字通信等领域。
# 基本特点
- 信号离散性:系统的输入和输出信号在离散的时间点上取样和处理的,信号的变化是逐步的。
- 状态变量:系统的状态变量是离散的,通常用差分方程来描述系统的动态行为。
- 数学表示:离散时间系统的行为通过差分方程或离散状态空间方程来描述。
# 应用场景
- 数字控制系统(如数字 PID 控制)
- 数字信号处理(如滤波器设计)
- 离散事件系统模拟
- 计算科学和通信系统中的离散时间时刻
# 优缺点
优点
- 适用于数字系统,便于在计算机或数字信号处理器中实现。
- 可以进行高效的数值计算,处理大规模数据。
- 对系统进行离散化后,计算和分析通常更为方便。
缺点
- 需要在模拟信号和数字信号之间进行转换(如采样、量化)。
- 离散化过程中可能导致信号失真,尤其是采样率不足时。
# 两种建模方式的对比
| 特性 | 连续时间建模 | 离散时间建模 |
|---|---|---|
| 信号变化 | 连续的,在任意时刻都有定义 | 离散的,仅在特定时间点取值 |
| 数学模型 | 微分方程,状态空间方程 | 差分方程,离散状态空间方程 |
| 系统状态 | 连续变量 | 离散变量 |
| 适用领域 | 模拟控制系统 物理过程 机械控制 | 数字信号处理 数字控制系统 计算机模拟 |
| 系统响应 | 精确描述物理过程,时间连续变化 | 适合数字系统,但可能产生离散化误差 |
| 计算复杂度 | 模拟和分析需要更复杂的数学工具和计算 | 数值计算更为简便,适合数字处理 |
| 采样与离散化 | 不需要采样,时间是连续的 | 需要采样和量化,信号是离散的 |
# 两种建模方式的转换
在实际应用中,很多系统既有连续时间的动态行为,又需要离散时间的计算和控制。在这种情况下,连续时间系统通常需要通过采样和离散化转换为离散时间系统。
常见的转换方法包括:
采样(Sampling)
连续时间信号通过采样过程转换为离散时间信号。在此过程中,信号在等间隔的时间点进行取样,将其转换为数字信号。
Z 变换与拉普拉斯变换
连续时间系统通常使用拉普拉斯变换来分析和设计,而离散时间则使用 Z 变换。两者之间的转换可以通过适当的数学关系来实现。
数字化控制器设计
连续时间的控制器(如 PID 控制器)可以通过离散化方法转换为数字控制器,使得其能够在数字处理系统中实现。
示例:在将一个连续时间的控制系统(如温控系统)转换为离散时间控制系统时,首先需要通过采样将传感器信号离散化,然后根据离散化的信号和控制算法(如数字 PID 控制器)生成控制信号,最后驱动被控设备。
# 示例模型
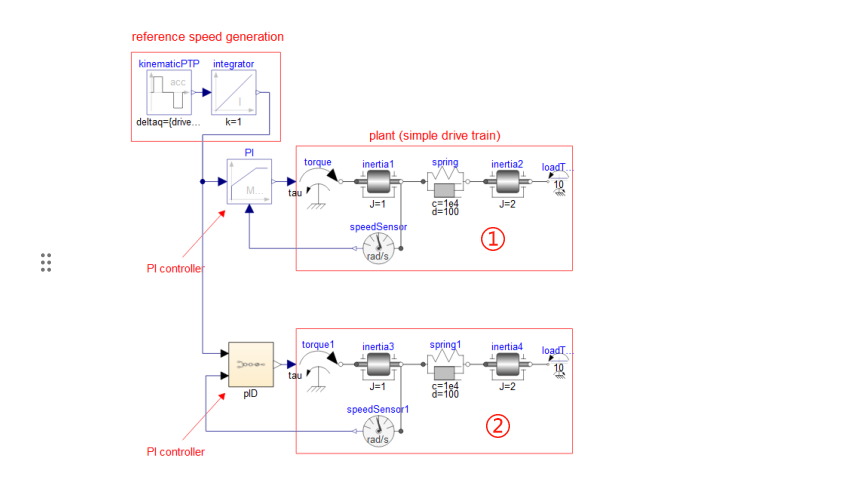
这两个 PI 模块其本质为将控制器的输入与输出的当前误差调整初步的控制输出,来逐步接近目标结果。
但第一部分与第二部分区别就在于第一部分的输入输出被描述成一个函数,任何时刻都有输出值,而第二部分的离散信号仅在到达采样时间时有一个输出值。实际上,连续信号是通过微分方程产生的,传递的函数基于拉普拉斯变换,而离散信号是通过差分方程产生的,传递的函数基于z变换。
就本模块物理过程而言:
- 离散信号是按照给定的步长,逐点代入该模块对应的方程中进行求解所得到的输出,它严格按照指定的时间步长执行更新,在两个时间步长之间的输出是恒定的。
- 连续信号其输出是对输入信号在整个时间段内的累积效果,求解器会根据连续模型的特性进行积分运算,相比离散信号输出按一定时间步长变化,连续信号实际输出会跟随时间的变化而变化。