# 简单减震系统优化模型
本示例的主要目的是展示如何利用响应优化工具箱来优化控制系统中的控制参数,以满足系统的响应边界范围设计要求。
# 问题描述
减震系统是车辆组件中必不可少的部分,当汽车在行驶过程中突然遇到不平整的路面时,减震系统就会产生作用,通过弹簧和阻尼器的作用可以使汽车的震动幅度减小,提升乘车人员的舒适度。
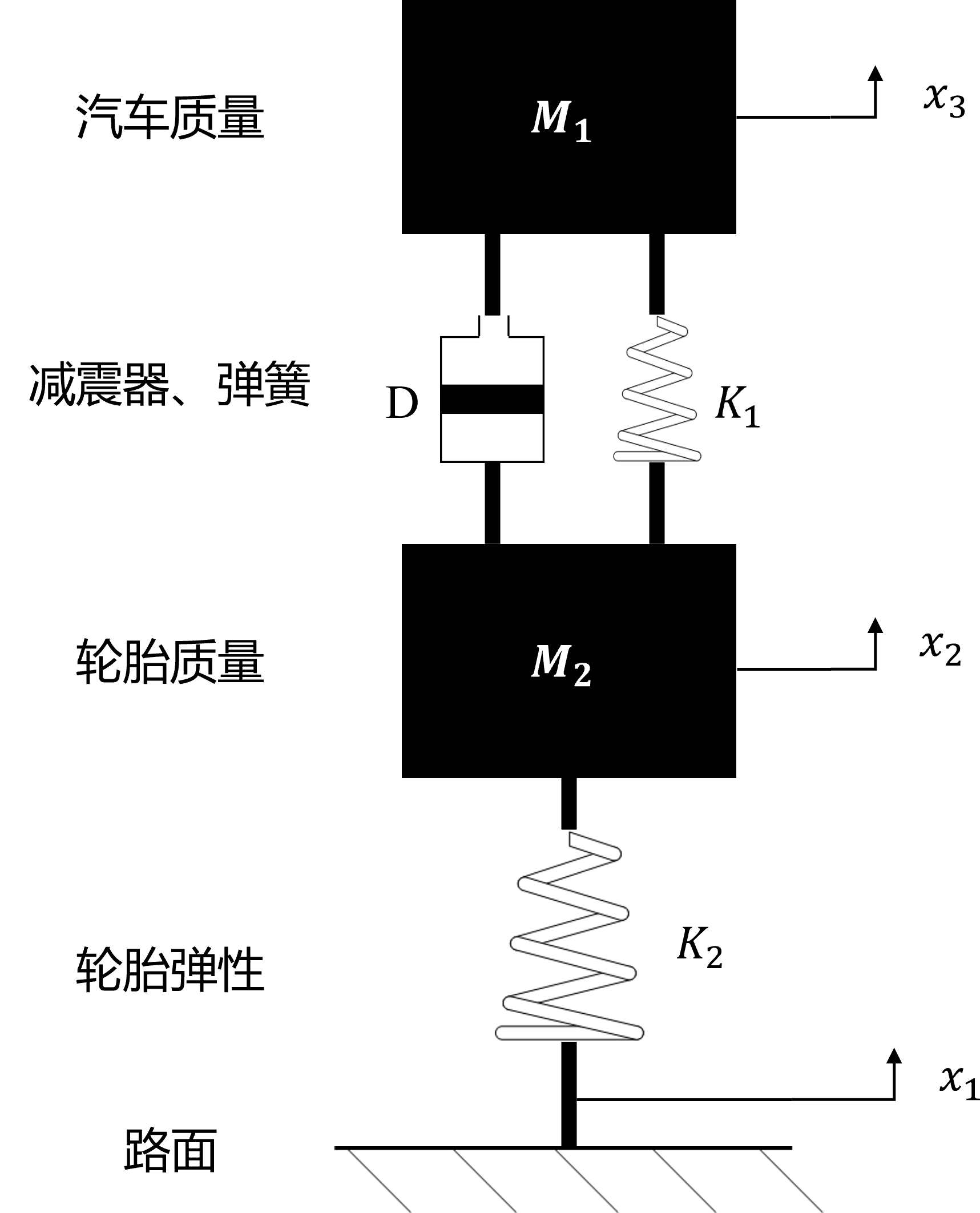
上图描述的是一个汽车的减震系统的简化模型,其中各参数含义如下所示。通过给弹簧
表示车体质量; 表示轮胎质量; 表示减震器阻尼系数; 、 表示弹簧刚度系数; 、 、 分别车体位移、轮毂位移和轮胎的弹性形变。
本质上,该系统是一个线性系统,根据力学原理可推导出其传递函数,如下式所示:
# 仿真模型搭建
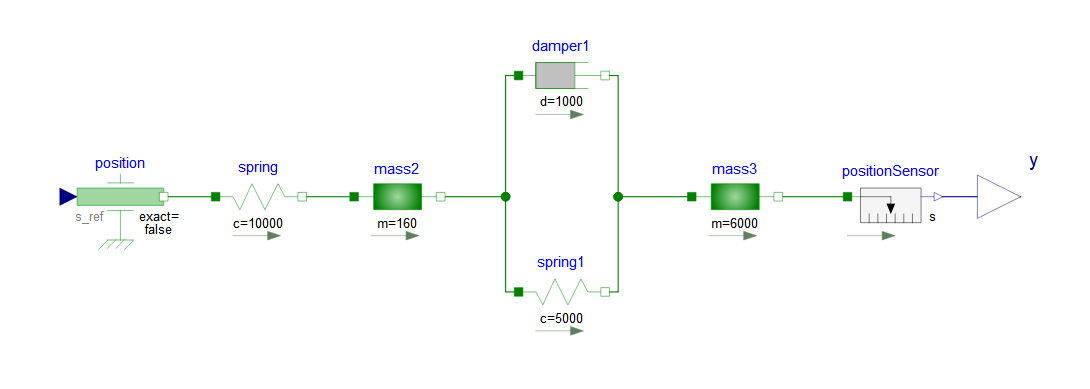
在 Sysplorer 工作区搭建如下图示意的减震系统物理模型及控制系统模型。
减震系统物理模型
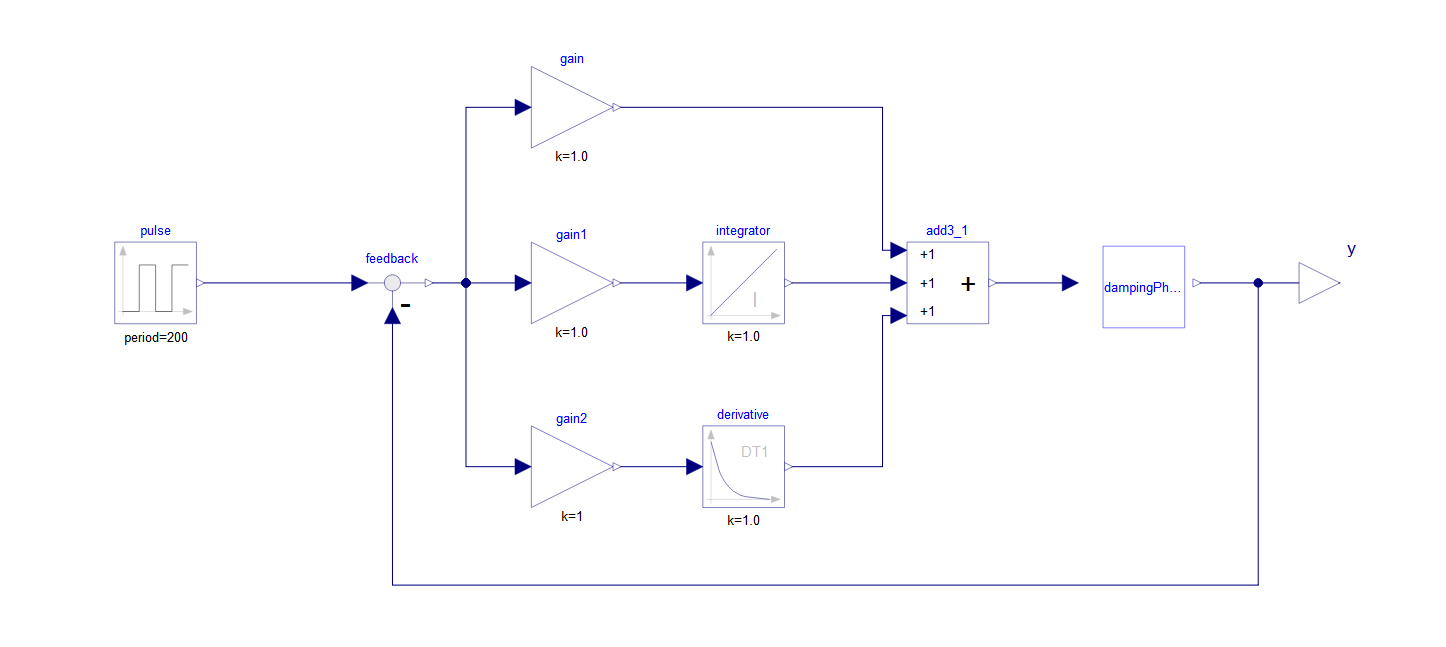
减震控制系统模型
提示
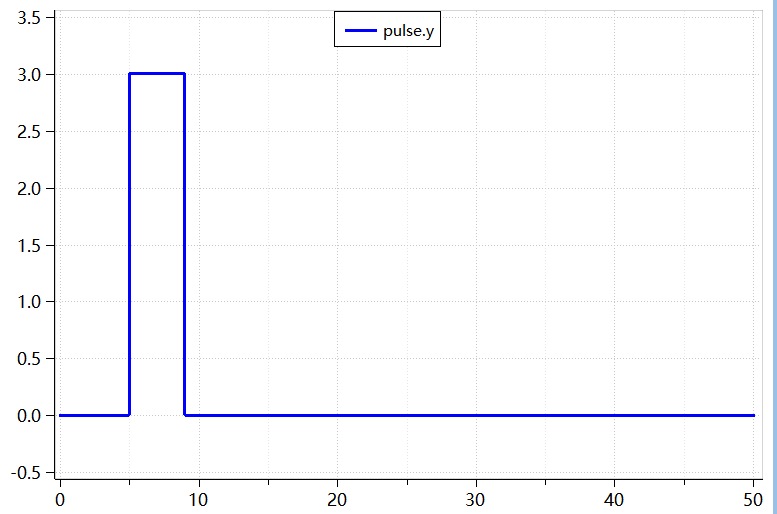
本示例为了模拟汽车行驶在路面时产生的颠簸状况,使用一个周期为 200 秒,幅值为 3,宽度为 2 秒,延迟时间为 5 秒的一个脉冲输入信号来表示汽车轮胎压到不平整路面时的反应。
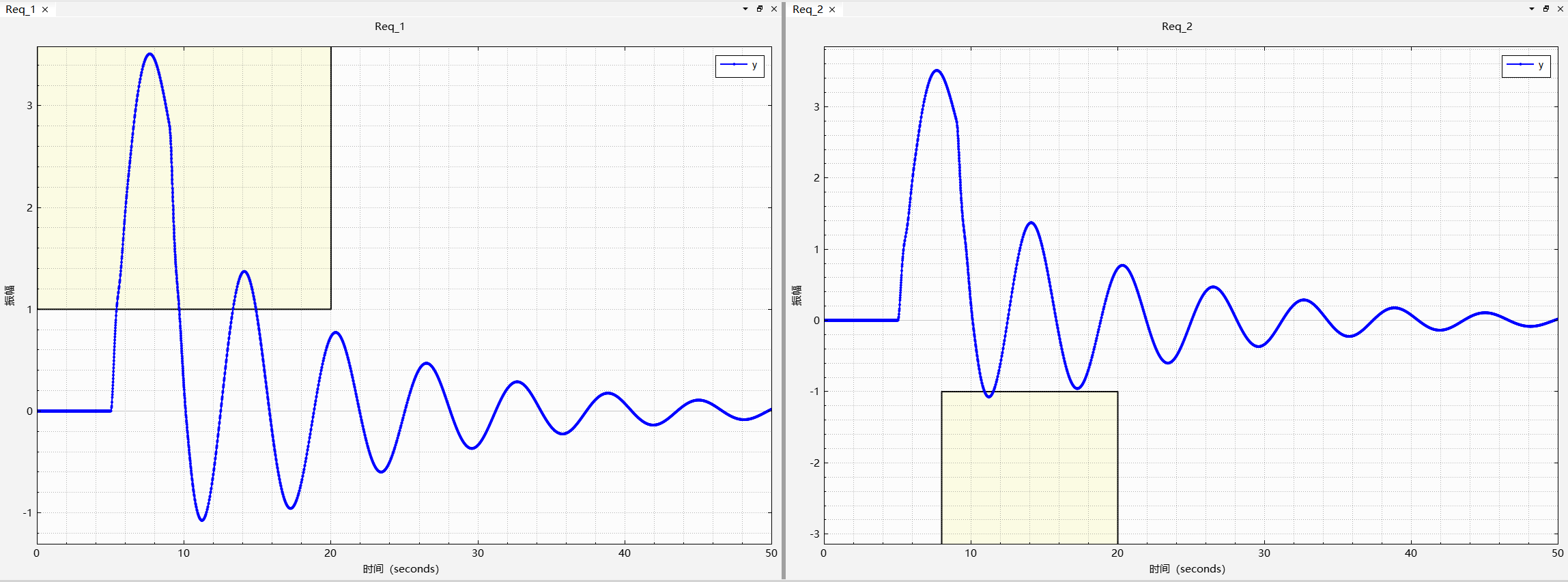
在默认控制参数下的系统响应输出(车体震动幅度)
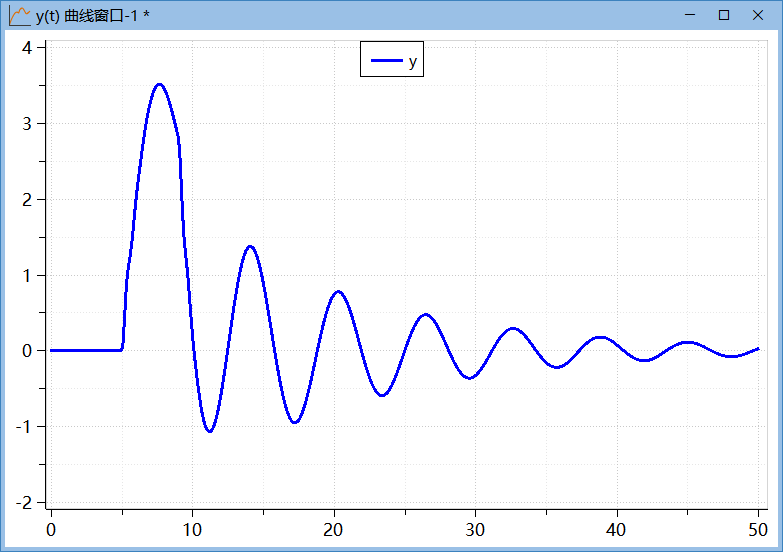
提示
本示例中车体的位移是以车体平稳时的中心点为坐标原点,且仿真时间设置为 50 秒。
# 优化任务设计
为使乘车人员在乘车时的舒适度更高,现在要求通过调整控制参数,使得车体的震动幅度不能超过 1,具体的幅度边界要求如下图所示:
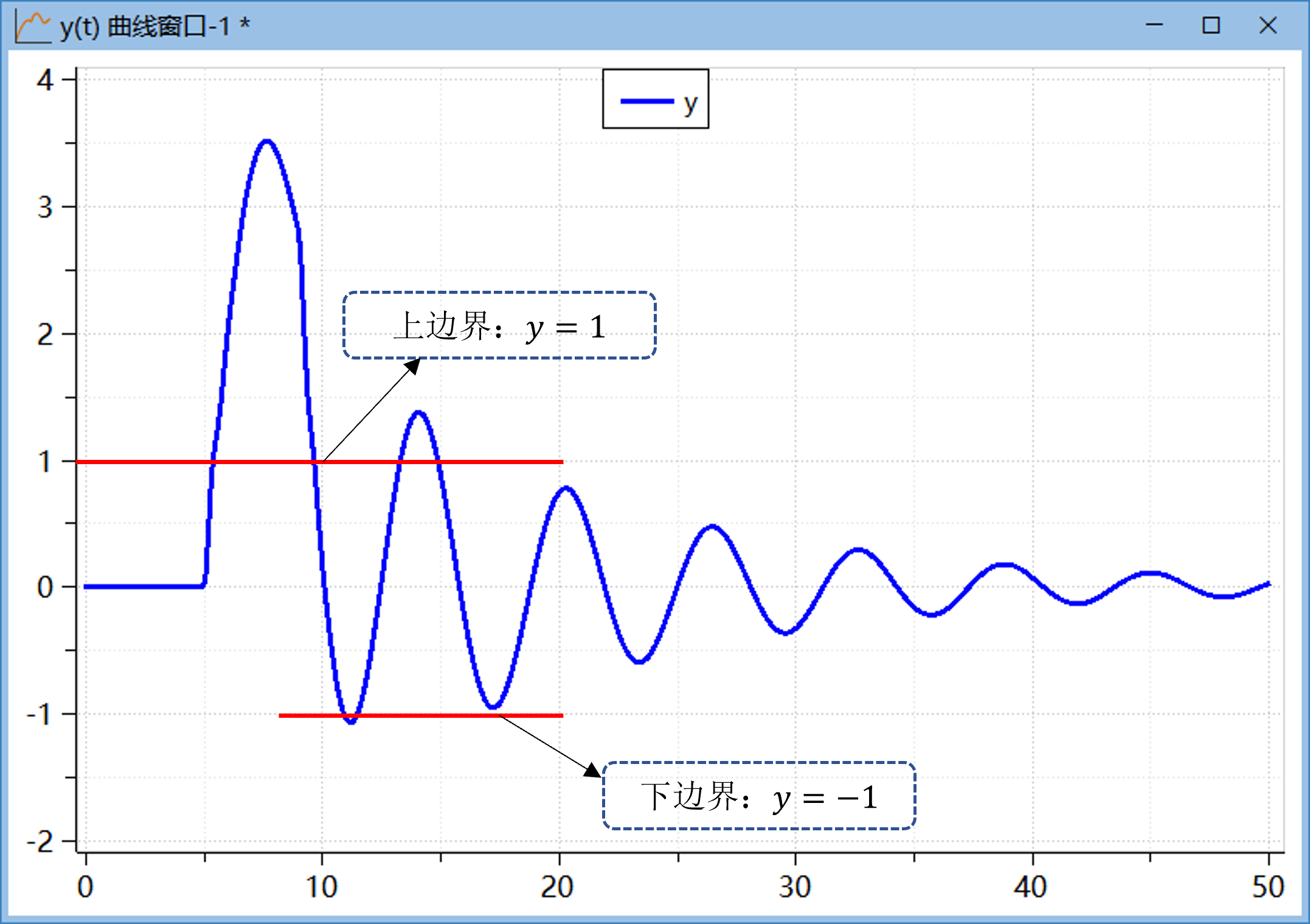
其中上边界限制振幅小于 1,下边界限制振幅小于 -1。
# 使用前准备
打开 Sysplorer,加载
模型,双击DampingControl.mo减震控制系统,单击工具栏中的响应优化工具箱图标,启动响应优化工具箱。# 响应优化操作步骤
启动响应优化工具箱以后,具体的操作步骤如下:
设置调节参数
(1) 单击工具栏中调节参数图标
 ;
;
(2) 在调节参数面板中单击选择参数按钮;
(3) 在选择参数面板中勾选、 和 作为调节参数,单击确定按钮;
(4) 设置各参数的初始值、范围如下图所示: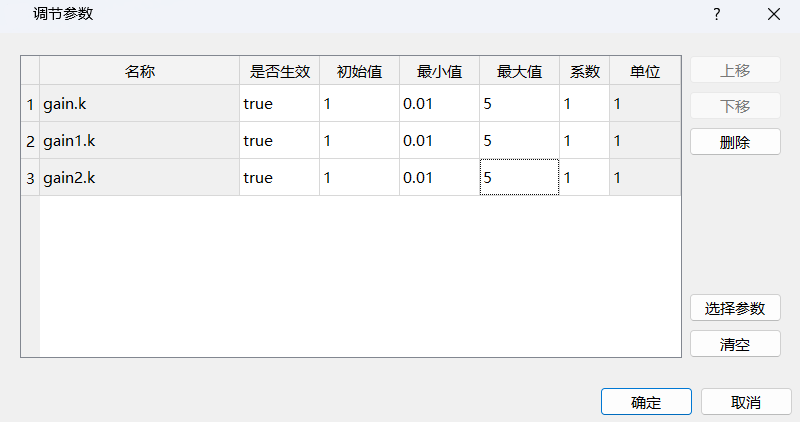
提示
- 是否生效有 true 和 false 两个可选状态,设置 false 表示对应的调节参数在本次优化任务中将会被屏蔽,反之设置 true,则对应的参数将会被启用;
- 初始值是指参数当前设置的数值,您可以手动调节;
- 最大值和最小值为参数在优化过程中的上下边界,此处设置需要根据实际应用和系统要求,确定每个调节参数的合理范围。
- 是否生效有 true 和 false 两个可选状态,设置 false 表示对应的调节参数在本次优化任务中将会被屏蔽,反之设置 true,则对应的参数将会被启用;
建立并选择需求
(1) 建立上边界限制。单击新建需求,选择变量线性边界,在弹出的变量线性边界面板中,选择输出变量
(车体震动幅度)为需求变量,设置类型为变量 <= 边界。设置开始振幅与结束振幅值为“1”,结束时间为“20”秒,开始时间为“0”秒。详细操作如下: 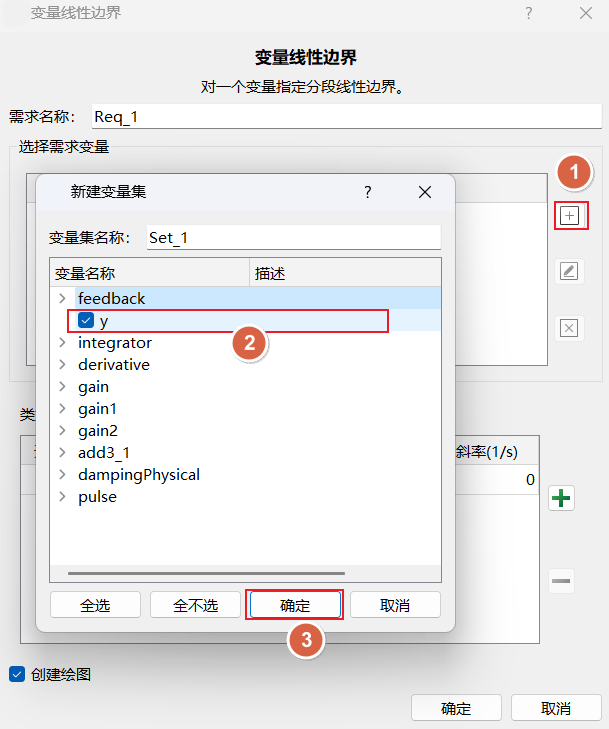
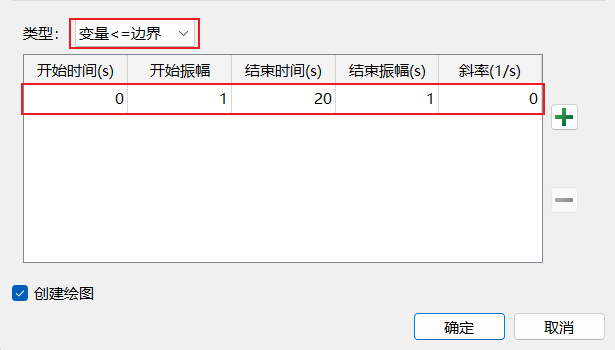
提示
- 设置开始时间的数值时,必须保证开始时间数值小于或等于结束时间数值,否则输入的数据无效;
- 斜率可以手动设置,也可以根据设置的时间与振幅参数自动计算斜率数值。
(2) 建立下边界限制。单击新建需求,选择变量线性边界,在弹出的变量线性边界面板中,选择输出变量
(车体震动幅度)为需求变量,设置类型为变量 >= 边界。设置开始振幅与结束振幅值为“-1”,结束时间为“20”秒,开始时间为“8”秒。详细操作如下: 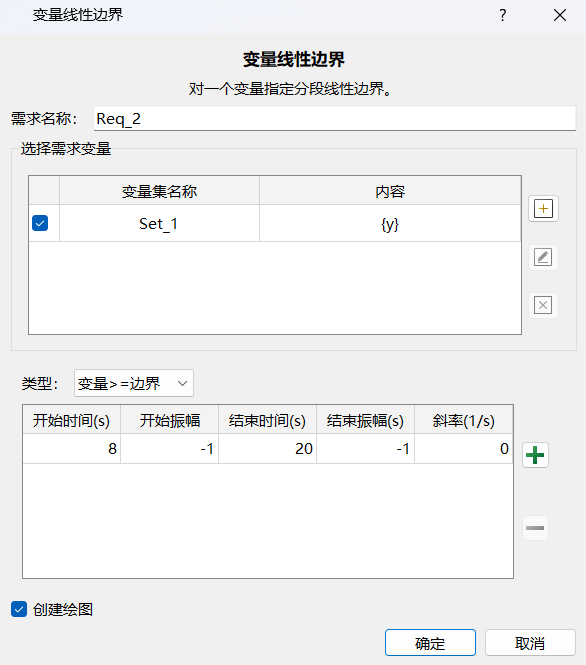
- 设置开始时间的数值时,必须保证开始时间数值小于或等于结束时间数值,否则输入的数据无效;
配置仿真相关参数
单击选项,设置仿真结束时间为“50”秒,收敛迭代次数为“8”,其他参数默认,具体设置如下图所示:
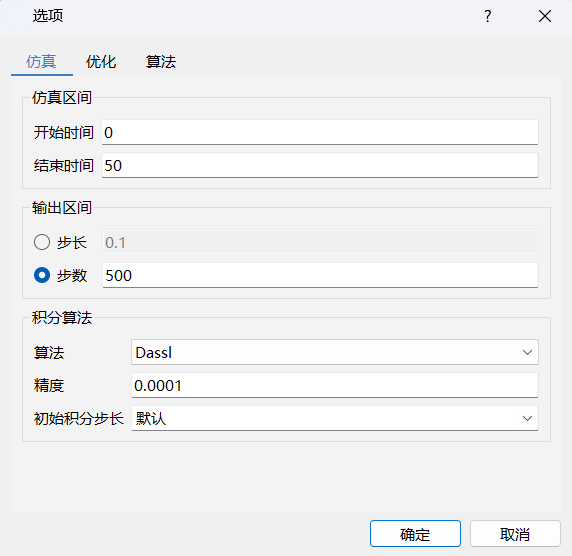
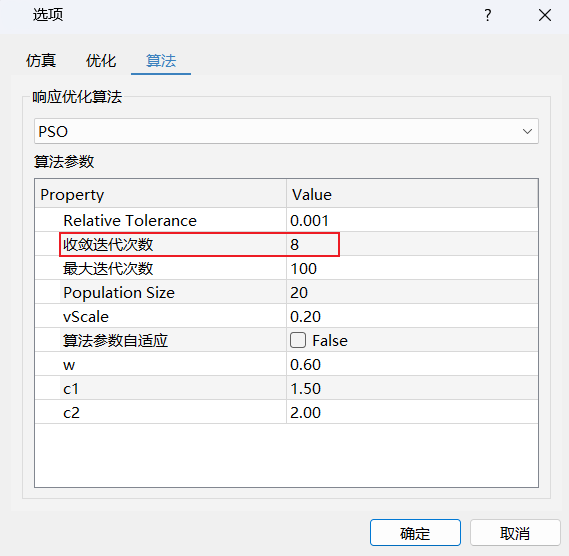
提示
这里收敛迭代次数是指当连续迭代 8 次的 Relative Tolerance 小于设定的值时,算法会自动退出迭代进程。
评估当前参数
单击评估当前参数,可查看在当前参数数值下的系统输出响应曲线。
开始优化
单击开始开始优化,在视图窗口可查看优化过程,单击打开报告,可查看优化过程中的迭代信息。
提示
因为响应优化工具箱使用的是智能优化算法,可能在一次优化任务中搜寻到不同值的最优解,因此存在同一模型配置相同的参数,多次仿真绘制的最终优化图不一样的情况。
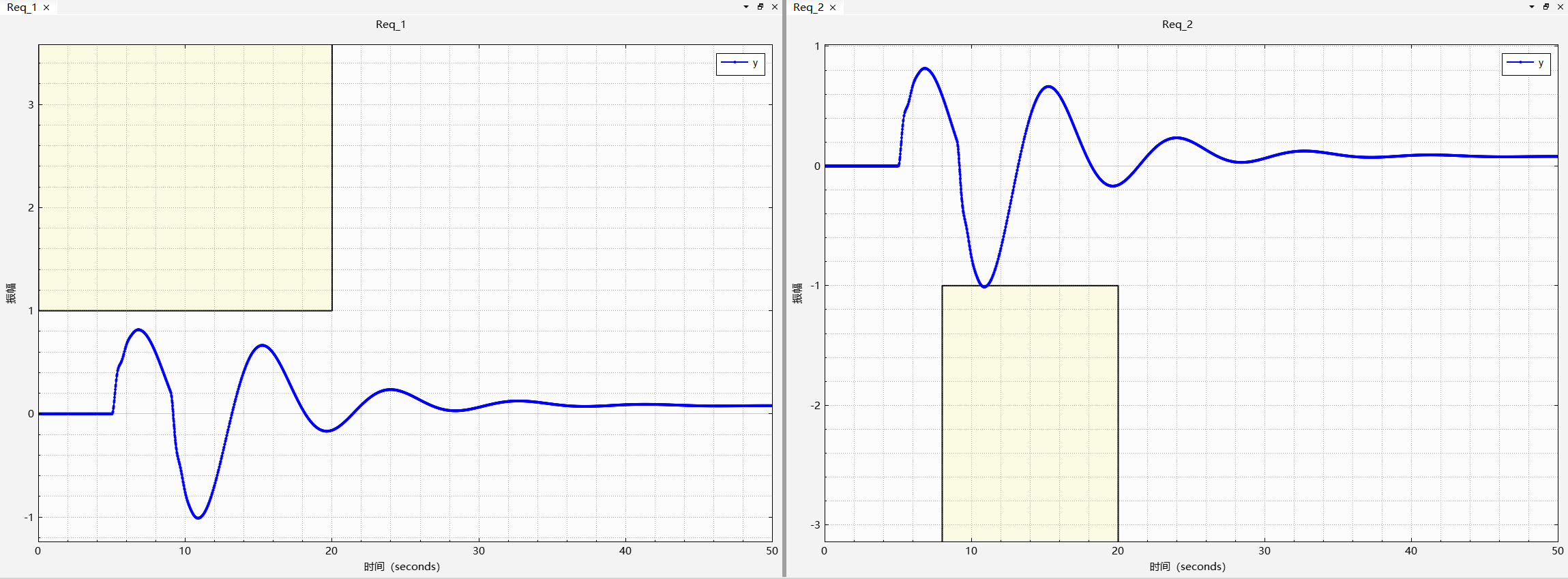
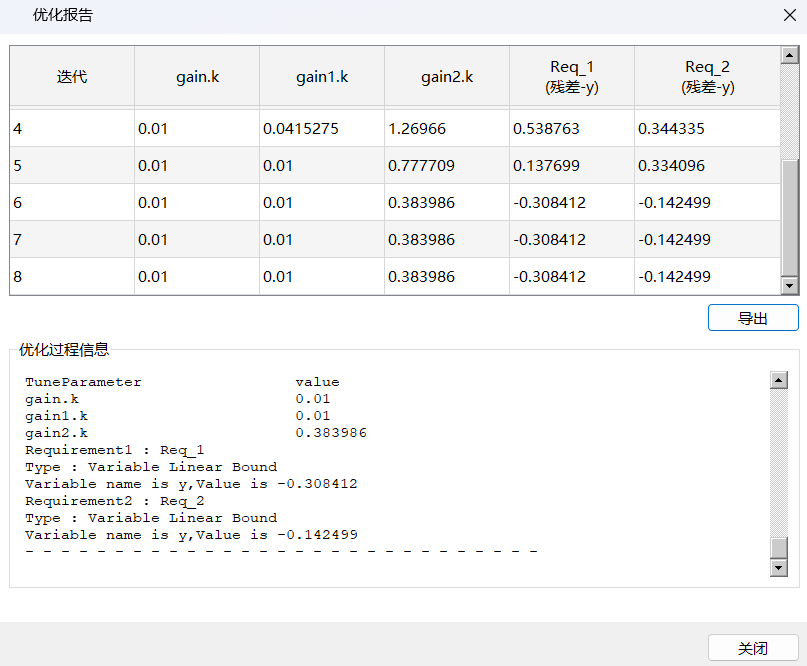
根据优化报告中的信息,需求 Req_1 和 Req_2 的残差值均小于 0,这说明,两个优化需求均已满足。
提示
残差值大于 0,表明优化需求不满足;等于 0 表明优化需求临界满足;小于 0 则表明优化需求被满足。