# 新手入门
本文提供了一个关于如何使用 PID 调节器设计控制器的具体案例。
# 用 PID 调节器设计 PID 控制器
本案例介绍了使用 PID 调节器的基本流程。
# 启动 PID 调节器
单击 Syslab 菜单栏中 APP 里的 PidTuner 图标,启动 PID 调节器,无参启动会自动导入一个默认模型 Plant = 1。也可以用以下命令启动。
init_syslabapp()
pidTuner()
或
init_syslabapp()
pidtuner()
# 导入被控 SISO 模型对象
本案例考虑用以下传递函数做为被控对象。
按照如下命令生成传递函数。
using TyControlSystems
sys = tf(1,[1,2,3])
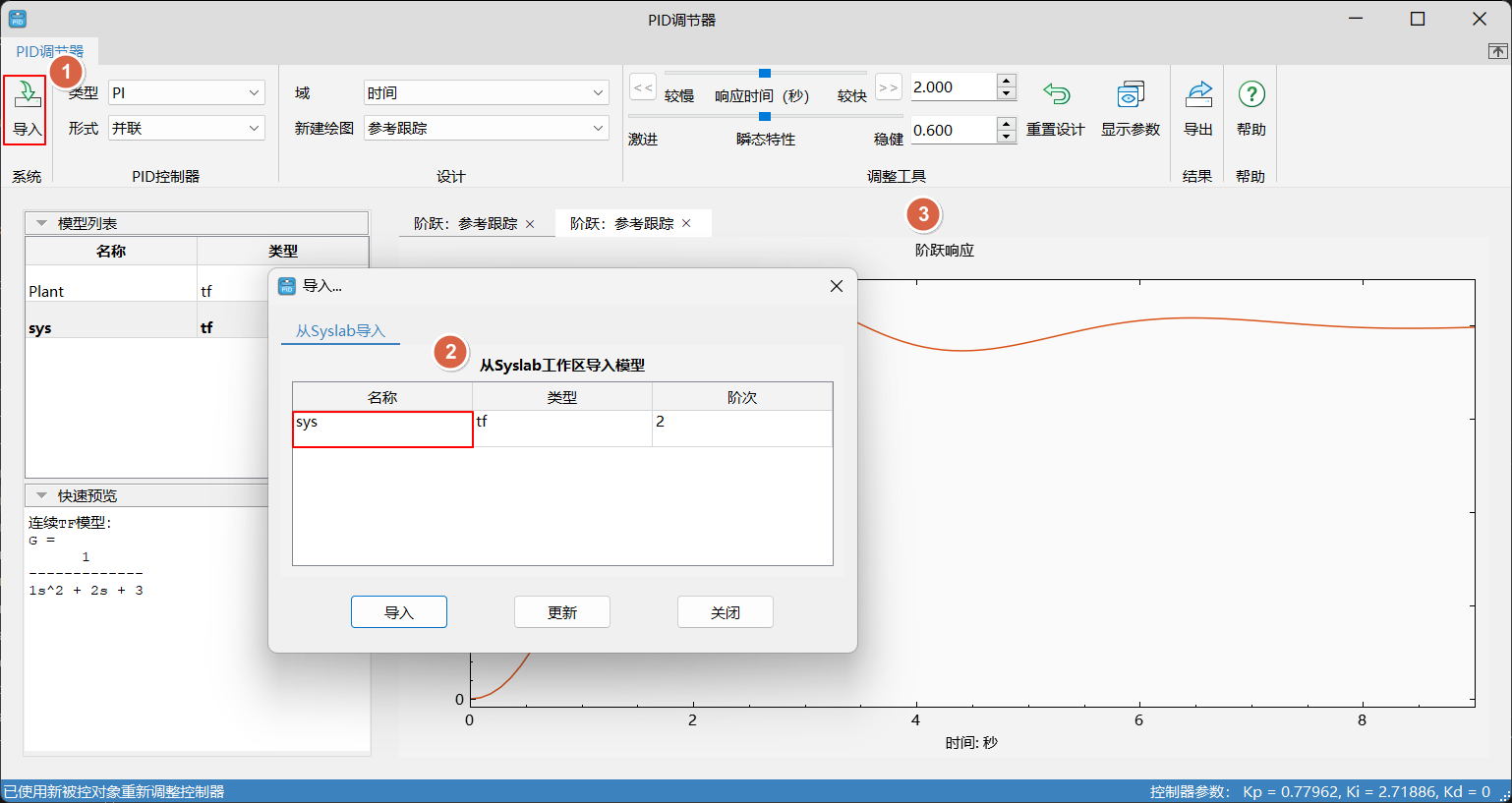
单击 PID 调节器页面菜单栏的导入按钮,选中被控对象 sys,单击导入,被控对象 sys 导入 App 中。
提示
PID 调节器默认类型为 PI,形式为并联。
导入被控对象后,新增阶跃参考跟踪绘图窗口。同时,时域响应指标默认响应时间为 2 s,瞬态特性为 0.6;频域响应指标默认带宽为 1 rad/s,相位裕度为 60 deg,绘图窗口会自动生成图像并显示。
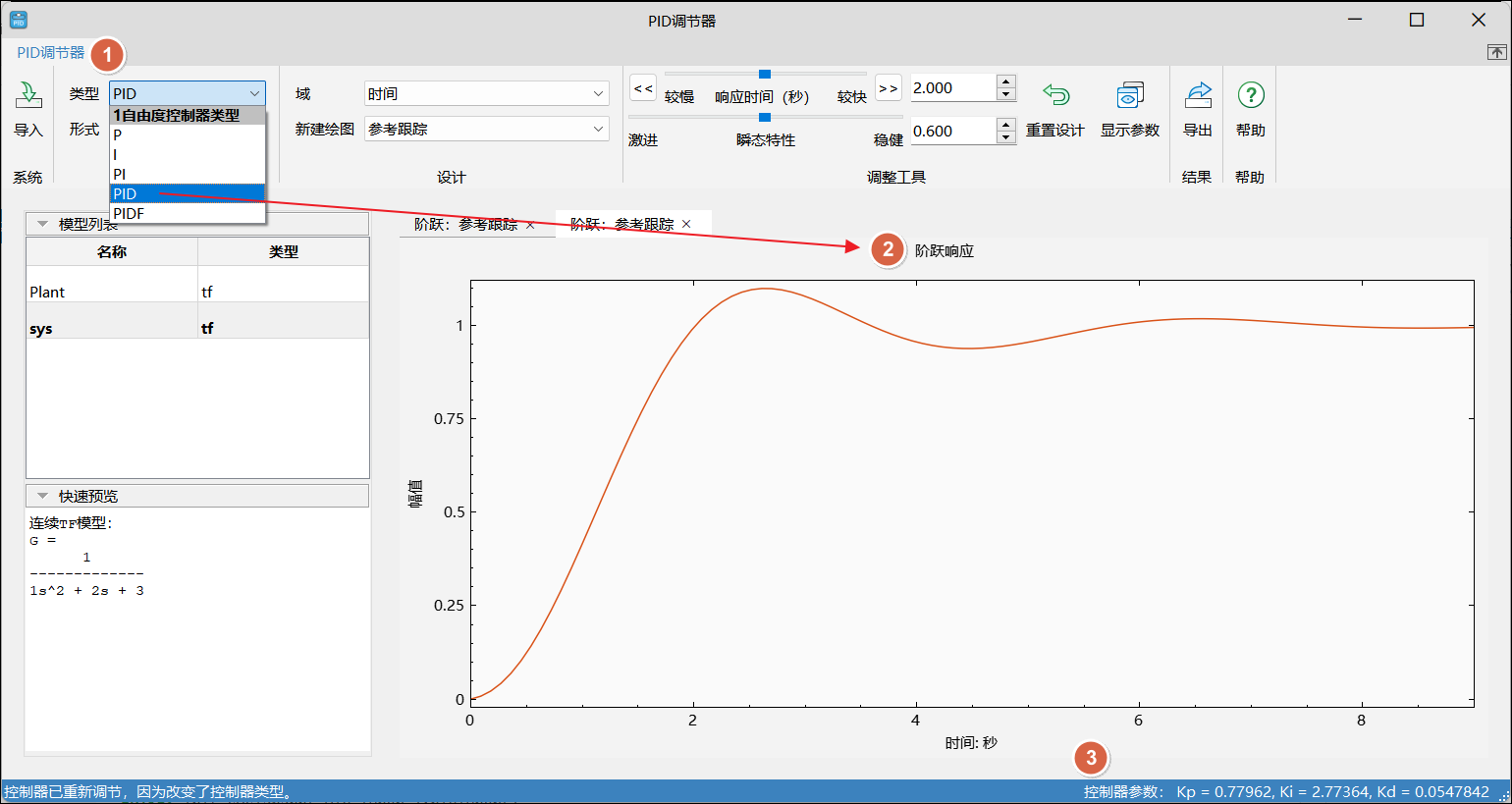
# 调整 PID 控制器设计类型、形式与性能指标
在 PID 控制器区域,单击类型展开下拉框,切换控制器类型为 PID,页面上的绘图、控制器参数与性能指标会自动更新。
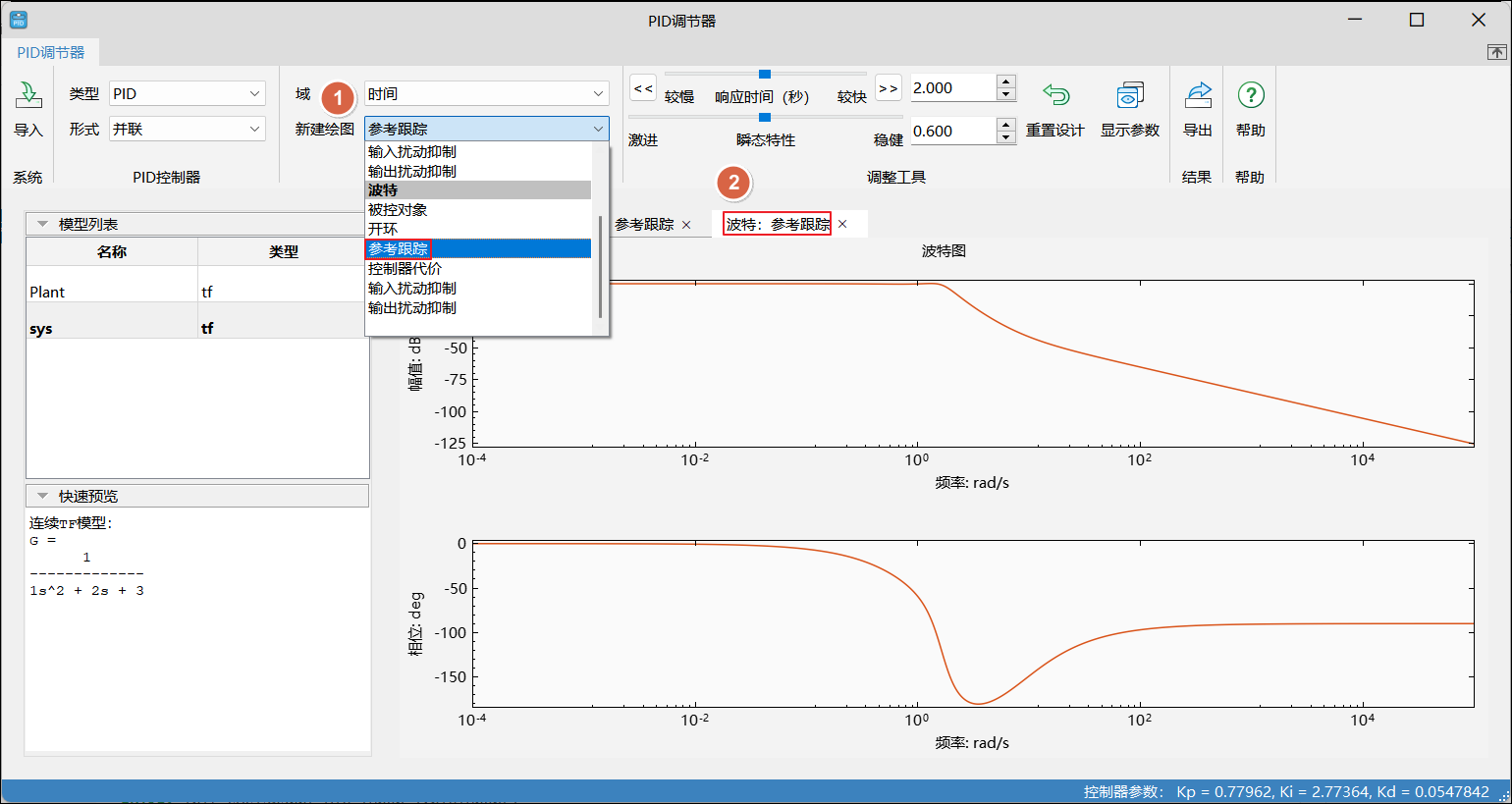
单击新建绘图下拉框,选择波特图的参考跟踪,新建波特参考跟踪绘图。
在设计区域,切换域为频率,在输入框中修改带宽为 7 rad/s,相位裕度为 77 deg;且在输入框后,Enter 键生效后,控制器参数、波特图参考跟踪、阶跃参考跟踪和开环性能指标都会实时更新。
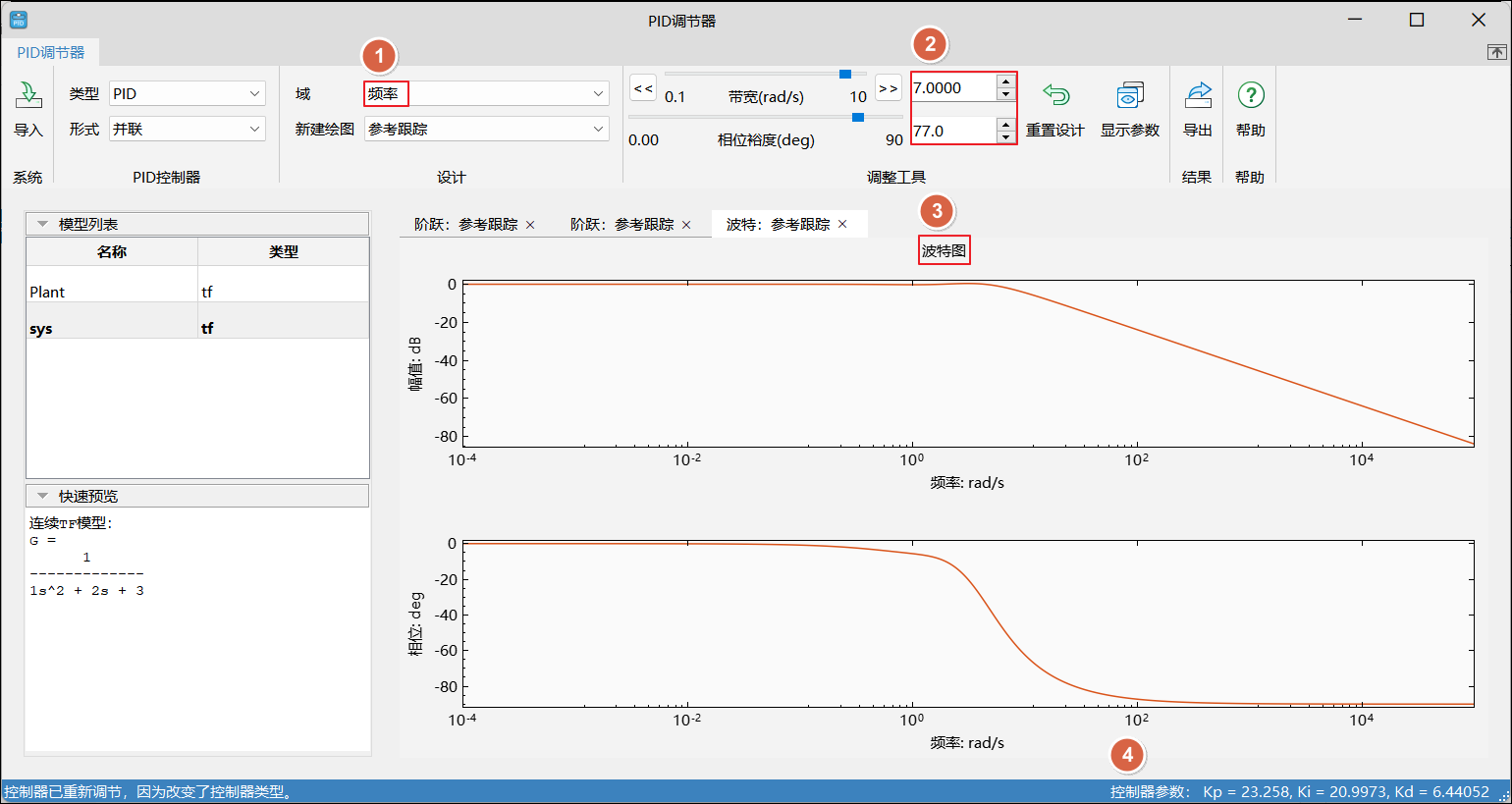
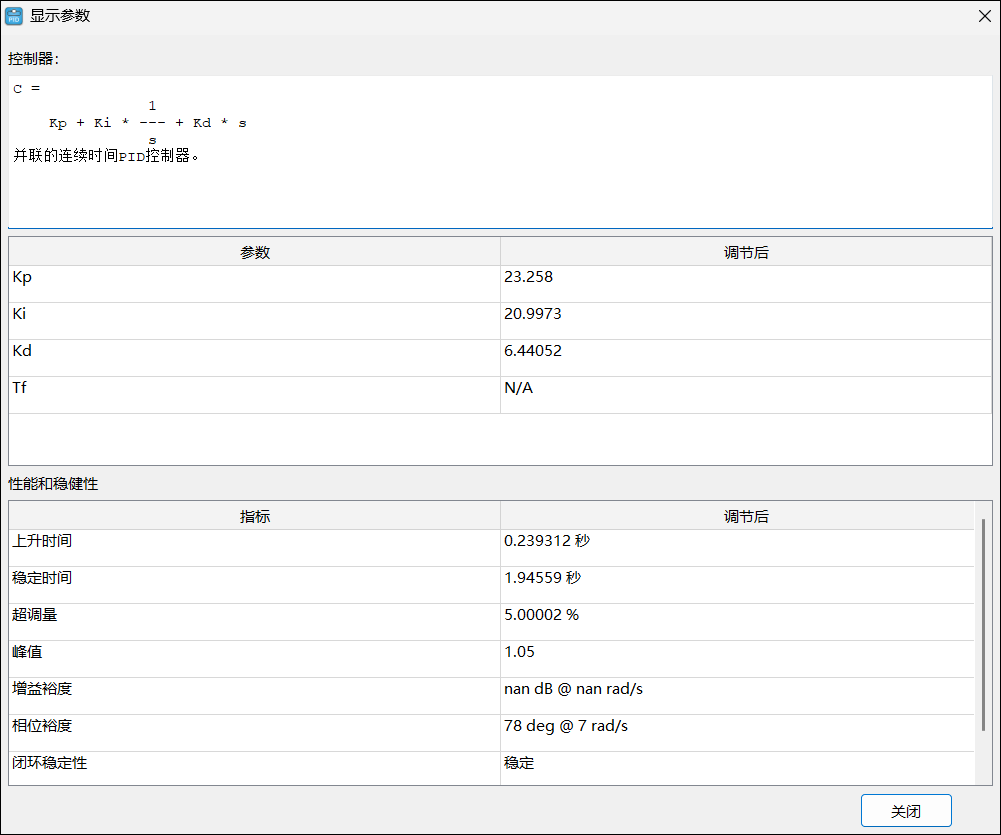
单击显示参数,参数面板的控制器参数和开环性能都会实时刷新。
# 导出 PID 控制器
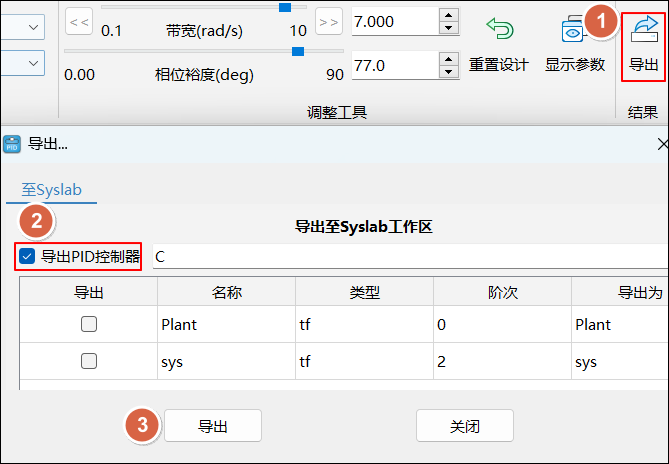
单击导出,弹出的导出面板中,默认勾选了 PID 控制器,且名称默认为 C。
单击面板中的导出按钮,会将控制器 C 导出至 Syslab 工作区。
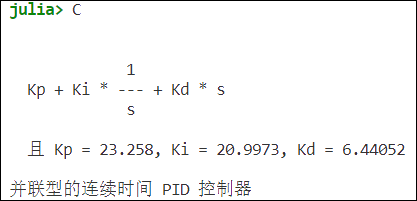
在 Syslab 终端可查看导出的控制器 C;或者在 Syslab 工作区查看。
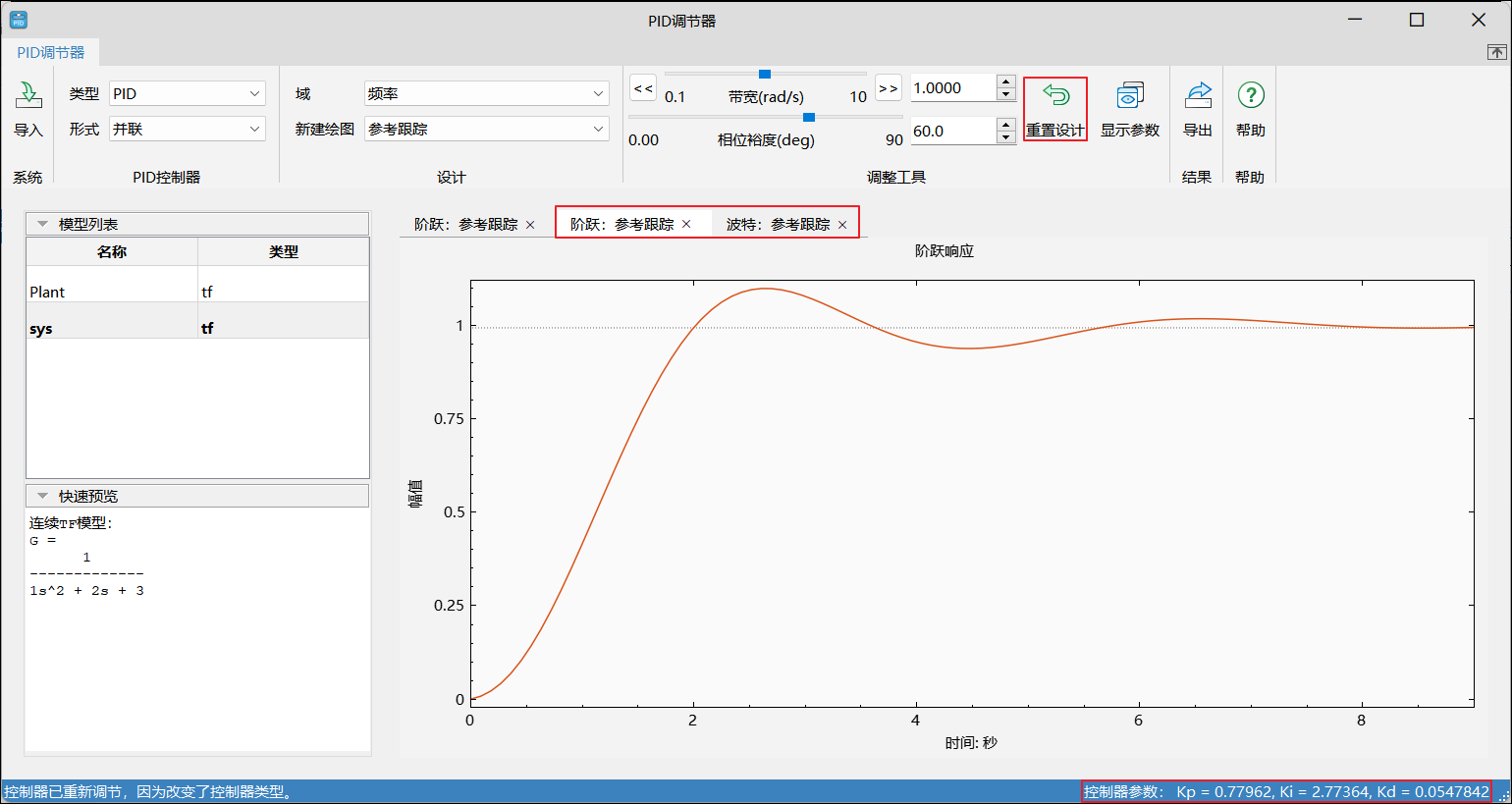
# 重置设计
单击重置设计按钮,即可将调整工具中的带宽和相位裕度分别重置为 1 rad/s 和 60 deg,响应时间和瞬态特性分别重置为 2 s 和 0.6。控制器参数恢复默认。
sys 系统的阶跃参考跟踪和波特参考跟踪绘图,全部恢复默认。
# 绘图窗口
在绘图窗口,可通过上下文菜单,勾选需要显示的基础信息。
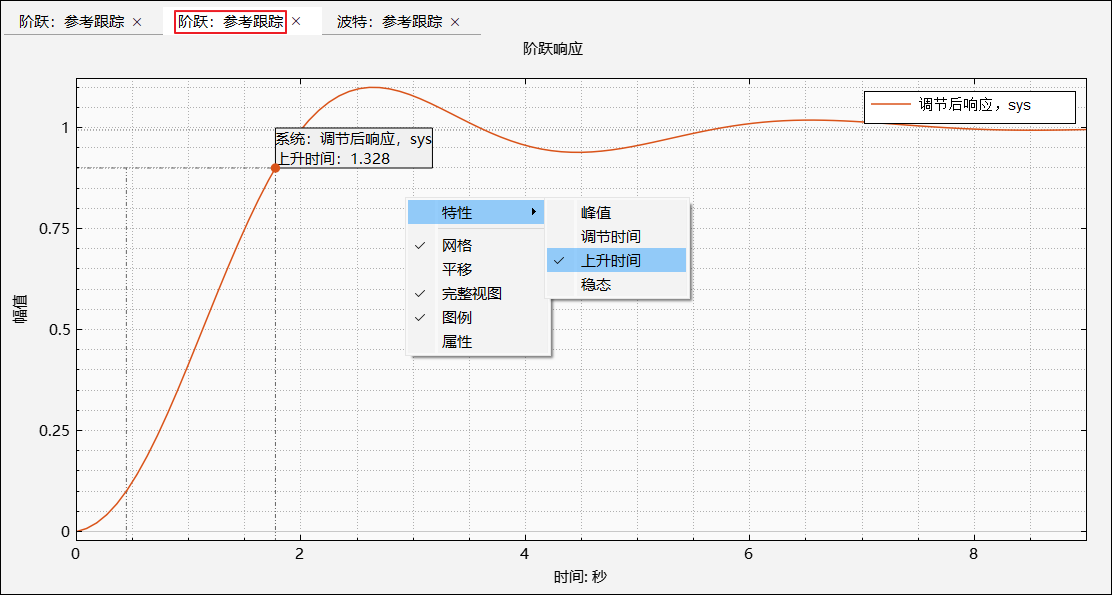
提示
控制系统工具箱的底层计算依赖控制函数库,App 主要展示的是功能,新手入门案例中的特性点精度问题无需关注。