# 强化学习
# 快速入门
在悬崖寻路环境中训练 QL 智能体
本案例说明如何训练 QL(Q-Learning)智能体在悬崖寻路环境中到达终点。
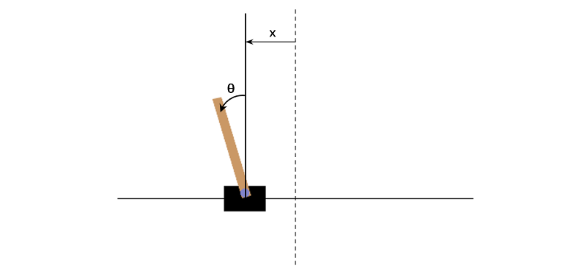
在倒立摆系统中训练 DQN 智能体
本案例说明如何训练 DQN(Deep Q-Network)智能体来平衡倒立摆。
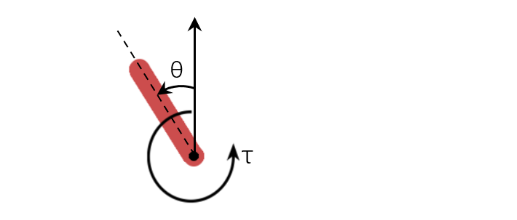
在单摆系统中训练 DDPG 智能体
本案例说明如何训练 DDPG(Deep Deterministic Policy Gradient)智能体来摆动并保持摆锤平衡。
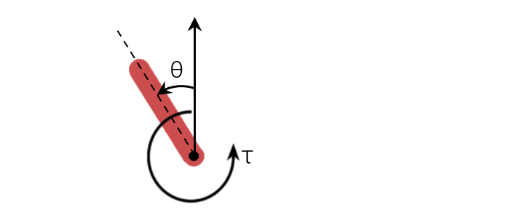
创建自定义环境 Pendulum 并在其中训练 DDPG 智能体
本案例说明如何使用 julia 来创建自定义环境 Pendulum ,并在该环境中训练 DDPG 智能体。
在 gym 中创建自定义环境并在其中训练 DQN 智能体
本案例说明如何使用 python 来创建自定义环境,并在该环境中训练 DQN(Deep Q-Network)智能体。